
Новый манипулятор VM10L86 с двойным удлинителем от PALFINGER — Технологии лесозаготовок
Новый манипулятор VM10L86 с двойным удлинителем от PALFINGER
Все знают, что конструирование новой техники – процесс сложный, что создание продукта с гарантированным спросом под силу только профессионалам. Многие утверждают, что ежегодно создавать что-то новое – невозможно.
Но команда PALFINGER разрушает мнение скептиков, ежегодно выводя на рынок грузоподъемной техники новые модели. В этом году концерн представил рынку две модели лесных манипуляторов – ВЕЛМАШ VС8L74 и VM10L86.
Николай Сидоренков
генеральный директор
компании «Подъемные машины» (группа PALFINGER)
Оценивая результаты уходящего года, могу сказать, что нашим главным достижением мы считаем то, что наши клиенты верят нам, любят и используют нашу продукцию в своей деятельности и что число наших клиентов год от года увеличивается.
В начале 2018 года линейка лесных манипуляторов нового поколения пополнилась краном с грузовым моментом 8 тм – VC8L74
 Сейчас на рынке идет активная замена ОМТЛ-70-02 на новую модель.
Сейчас на рынке идет активная замена ОМТЛ-70-02 на новую модель.
Вторая новинка – манипулятор ВЕЛМАШ VM10L86 – появилась ближе к концу года. Новый кран VM10L86 с двойным удлинителем и вылетом 8,6 м – это логичное продолжение большого проекта PALFINGER по обновлению линейки манипуляторов ВЕЛМАШ. Напомним, что в 2016 году на рынке появился манипулятор нового поколения VM10L74, который заменил ОМТЛ-97.
Проект по созданию крана с двойным телескопом стартовал весной 2018 года. Работа над проектом велась в тесном сотрудничестве между специалистами из России и Австрии. Такой подход хорошо себя зарекомендовал, о чем говорит успех предыдущих разработок. После всех расчетов и выбора конструктивных решений был изготовлен опытный образец, который прошел ресурсные испытания – 1000 моточасов беспрерывной работы с весом в 1220 кг, 4 операции на полном вылете с нагрузкой, превышающей номинальную на 10 %. По результатам испытаний были внесены необходимые изменения в конструкцию, изготовлена предсерия из пяти манипуляторов, которые отправились в опытную эксплуатацию в лесхозы Беларуси.
Манипулятор VM10L86 очень похож на VM10L74: основание с опорами, колонна, пост управления, стрела и основные гидроцилиндры полностью унифицированы. Это существенно уменьшает номенклатуру уникальных деталей и облегчает работу сервисно-ремонтных служб. В то же время рукоять с удлинителями гораздо больше похожа на аналогичные узлы манипуляторов Epsilon, и здесь бросается в глаза основное отличие нового манипулятора от ОМТЛ-97-04 – привод крайнего удлинителя цепной, а все гидравлические линии спрятаны внутрь коробов. Это позволило сделать конструкцию узла очень компактной и максимально защитить РВД и трубопроводы от случайного повреждения. При этом конструкция обеспечивает возможность легкой замены изношенных рукавов без разборки рукояти за считаные минуты даже в полевых условиях.
Цепной привод вместо второго гидроцилиндра дает сразу несколько преимуществ:
-
при одинаковых объемах один цилиндр быстрее заполняется рабочей жидкостью и дает возможность повысить усилия выдвижения и втягивания без потери скорости;
-
количество гидравлических соединений минимизировано, что сокращает риск утечек, потери давления и перегрева масла;
-
одновременное равномерное выдвижение двух удлинителей позволяет равномерно распределить нагрузки вдоль их коробов.


Кроме того, цепь не требует какого-либо сложного обслуживания или ремонта – достаточно лишь периодически подтягивать ее регулировочной гайкой.
Еще одна важная особенность нового манипулятора – качественно новая оптика. Все фары на VM10L86 светодиодные, а их разъемы хорошо защищены от воздействия окружающей среды.
Если же сравнивать VM10L86 с ОМТЛ-97-04 в целом, то новый манипулятор прочнее, надежнее, быстрее, комфортнее и безопаснее для оператора. При этом его масса уменьшилась на 400 кг при практически одинаковых показателях по вылету и грузоподъемности.
АО «Подьемные машины»
Новости → Новинки → Truck&Bus
Предназначенный для установки на шасси грузовика полной массой от 32 тонн, КМУ EFFER 1000 является первым краном-манипулятором с грузовым моментом 90 тм, предлагающий 9-секционную стрелу с шестью удлинителями JIB, которая обеспечивает грузоподъемность 2300 кг при максимальном вылете 26 м и максимальную полезную нагрузку 5 800 кг при вылете 23 м.
Рабочие характеристики и размер делают EFFER 1000 идеальным для работы в мегаполисах с высокими зданиями, где он может работать с тяжелыми грузами на большой высоте, поскольку его не нужно устанавливать на более крупные грузовики. Кран-манипулятор был спроектирован на основе отзывов клиентов EFFER в строительной отрасли, а также в сфере аренды и обслуживания, которым нужен был продукт для подъема тяжелых грузов на большую высоту.
«Мы прислушались к мнению наших клиентов и создали кран-манипулятор EFFER, который меняет правила игры, обеспечивая лучшую вертикальную производительность в своем классе. EFFER 1000 — это тяжелый кран-манипулятор с конкурирующими по вертикали вылетом и грузоподъемностью сверхтяжелого крана без необходимости использования больших грузовиков. Такая гибкость позволяет им работать в тесных городских условиях и экономить деньги», — сказал Марсель Боксем, директор по глобальному управлению продуктами Hiab.
Ключом к вертикальным характеристикам крана-манипулятора является десятиугольная форма стрелы V10-Force, которая обеспечивает прочность, необходимую для выдерживания самых тяжелых нагрузок, при одновременном снижении боковых колебаний до минимума и повышении общей точности.
Он также имеет новый удлинитель MULTIPOWER JIB, который сохраняет производительность на более высоких уровнях расширения, даже при использовании с 5-го по 9-е расширение. Кран может быть оборудован дополнительными V-образными выносными стабилизаторами EFFER и CroSStab, которые увеличивают доступную площадь поверхности размещения грузовика для обеспечения максимальной устойчивости.
Кран-манипулятор оснащен системой управления EFFER Progress 2.0, которая позволяет подключать цифровые решения, поэтому владельцы и менеджеры автопарков могут получать данные об использовании и производительности крана для облегчения планирования технического обслуживания и увеличения времени безотказной работы. С помощью удаленной диагностики кран можно проверять или получать обновления программного обеспечения без посещения сервисного центра, а также без планирования. Это также дает возможность владельцам отслеживать состояние кранов и рабочие циклы для более эффективного управления своим парком. Progress 2.0 соответствует стандарту CE и предоставляет многочисленные функции безопасности, такие как функции поддержки и датчики, которые помогают операторам во время рабочих циклов, избегая чрезмерных рисков нагрузки и отключения при необходимости.
КМУ EFFER 1000 доступен для заказа по всему миру с февраля 2021 года у дилеров EFFER и у дилеров Hiab в отдельных странах.
Выпущен новый многофункциональный кран-манипулятор
41788 / 26. 03.2019 / Выпущен новый многофункциональный кран-манипулятор
03.2019 / Выпущен новый многофункциональный кран-манипулятор
ЗКТ «РУСКОМТРАНС» изготовил новинку своей спецтехники. На это раз компания представила
многофункциональную модель крана-манипулятора HKTC HLC-8026А с грузовой корзиной и универсальной бурильно-крановой установкой, который базируется на бортовом Урал 4320 (6×6). Новинка способна осуществлять погрузо-разгрузочные работы, бурить скважины, устанавливать и транспортировать столбы, опоры и сваи, монтировать трубы, а так же осуществлять подъем рабочих специалистов.Управление КМУ и буром происходит либо с сиденья оператора располагающегося на колонне, либо с пульта дистанционного управления.
Буровой агрегат HKTC HLC-8026А оснащен буром диаметром 450 мм с крутящим моментом 8893 Нм и частотой его вращения 36 об/мин. В базовой комплектации глубина бурения составляет 4 метра, а рабочий радиус 6690 мм.
Шести секционная КМУ имеет угол поворота стрелы на 360 градусов (непрерывное вращение)и отрицательный угол стрелы 16 градусов. Максимальная высота подъема стрелы составляет 22 метра и рабочий радиус 19,9 метра. Максимальная грузоподъемность при минимальном вылете стрелы 2,4 метра равна 7 тоннам, а при максимальном вылете 19,9 метра – 495 кг.
Максимальная высота подъема стрелы составляет 22 метра и рабочий радиус 19,9 метра. Максимальная грузоподъемность при минимальном вылете стрелы 2,4 метра равна 7 тоннам, а при максимальном вылете 19,9 метра – 495 кг.
Съемная люлька грузоподъемностью 200 кг. Опционально высоту подъема грузовой люльки можно увеличить до 24 метров, а так же оснастить дополнительными приборами безопасности. В опциональное оснащение безопасностью входят: ограничитель зоны работы, система аварийной остановки двигателя, ограничитель груза и аварийное опускание платформы, указатель угла наклона, блокировка подъема стрелы, управление опорами с возможностью блокировки, система управления оборотами двигателя, гидросистема электропривода и датчик крайнего положения крюка.
Бортовая платформа длиной 4635 мм, имеет съемные стальные борта, быстросъемные двухклавишные стойки, такелажные кольца, ложементы с закладными предназначенные для перевозки опор.
Кран манипулятор J6 6×4 (CA3250)
Колесная формула
6х4
Мосты
Главная передача: двойная, разнесенная,передаточное число 5,769
Объём топливного бака (л)
400
Рулевое управление
TRW FAWER, гидроусилитель руля
Система питания
Электронная, BOSСH
Тип кабины
Новая FAW J6, цельнометаллическая, двухдверная, двухместная, откидывающася вперед, со спальным местом
Сцепление
SACHS / YIDONG
Тормозная система
Пневматический двухконтурный привод с разделением на контуры на переднюю и заднюю ось, с ABS
Модель манипулятора
HIAB 190TM
Габаритные размеры
Колёсная база (мм)
4300 + 1350
Общие характеристики
Модель
CA3250P66K2T1E4
Колесная формула
6х4
Грузоподъёмность борта (кг)
20 000
Грузоподъёмность стрелы (кг)
8 000
Тип кабины
FAW J6
Клиренс (мм)
320
Мощность (л. с./кВт)
с./кВт)
375/276
Максимальный крутящий момент (Нм)
1550 при 1300 об/мин
Электронная система управления
Bosch
Экологический стандарт
Евро5
Максимальный грузовой момент
19 Тм.
Максимальная высота подъема стрелы
19.4 м.
Рабочий радиус
21. 7 м.
7 м.
Масса установки
3 572 кг.
Производительность насоса
83 л/мин.
Скорость поворота
2 об/мин.
Угол поворота
360 градусов
Угол наклона
-170 ~ 810
Максимальная ширина выдвижения аутригеров
передних — 5.7 метра
задних — 4.4 метра
Подвеска крюка
гибкая
Грузовысотные характеристики
без выдвижения стрелы
8 000 кг.
при выдвижении 2-х секций
3 900 кг.
при выдвижении 3-х секций
2 100 кг.
при выдвижении 4-х секций
1 250 кг.
при выдвижении 5-х секций
850 кг.
при выдвижении 6-х секций
600 кг.
Модель
Fast Gear 12JSD160T
Скорости
12 вперед и 2 назад
Номинальный крутящий момент (Нм)
1 600
Подвеска колес
Зависимая рессорная
10 листов толщиной по 18 мм шириной 90 мм
Нагрузка (кг)
7 500
Зависимая балансирная рессорная
12 листов толщиной по 24 мм шириной 90 мм
Нагрузка (кг)
27 600
Передаточное число главной передачи
5,77
Карданный вал
двухслойный стальной 8 мм + 6 мм без подвесного подшипника
Тормозная система
Колесные тормоза
барабанного типа
На переднюю и заднюю ось
с Abs Wabco
Дополнительный моторный тормоз
горный
Высота (мм)
1 100
Трехслойная
лонжерон в лонжероне
Толщина пакета лонжерона (мм)
24 (8 + 8 + 8)
Ширина полки лонжерона (мм)
90
Высота полки лонжерона (мм)
320
Антикоррозийная обработка
Да
Рулевое управление
Рулевой привод с гидроусилителем
Trw Fawer
Общие технические характеристики
Снаряженная масса (кг)
16 140
Максимально разрешенная масса (кг)
35 100
Шины передние/задние размер
315/80R22. 5
5
Диски стальные
на 10 шпилек
Объём топливного бака (л)
400
Регулируемая по углу наклона рулевая колонка
Радиоприемник AM/FM с кассетной магнитолой
Трехточечные ремни безопасности
Тканевая обивка сидений
Перчаточный ящик
Подстаканник
Климатическая система
Ящик на центральном тоннеле
Плавающая подвеска кабины
Воздухоочиститель с двумя фильтрующими элементами
Зуммер при движении задним ходом
Зуммер запирания кабины
Фильтр — отстойник
Электрокорректор фар
Трехточечное крепление зеркал
Подогрев кузова
Брызговики
Ручные стеклоподъемники
Воздушный дефлектор кабины
2 аккумулятора (2Х12 Вольт 180 а/ч)
Пневматическая подвеска водительского сидения
Буксировочный крюк
Полочки над лобовым стеклом
Многослойное ветровое стекло
Межосевая блокировка дифференциала
Межосевая блокировка колес
Расширенный набор инструментов
Специальная комплектация
Отопитель кабины Webasto
Сепаратор с подогревом топлива и встроенным электрическим насосом
Кран-манипулятор – многофункциональный помощник
В век технического прогресса, когда новейшие разработки устаревают за считанные годы, производственное предприятие «Чайка-Сервис» выбрало себе девиз: «Мы расширяем возможности автомобиля». И именно этому посвящен каждый день работы предприятия. Ведь один новый узел, один новый элемент оборудования может превратить серийный автомобиль в многофункционального помощника в различных сферах деятельности.
И именно этому посвящен каждый день работы предприятия. Ведь один новый узел, один новый элемент оборудования может превратить серийный автомобиль в многофункционального помощника в различных сферах деятельности.
| Краны-манипуляторы |
Одним из приоритетных направлений в работе предприятия является производство автомобилей, оснащенных краноманипуляторной установкой (КМУ). Чем же привлекателен кран-манипулятор?
Это весьма полезное устройство, которое найдет применение на любом предприятии, в любом хозяйстве. Погрузить, разгрузить, «закинуть» перекрытия на второй этаж и прочие работы – все может выполнить кран-манипулятор. Как показал заграничный опыт, наиболее выгодно использование кранов-манипуляторов на базе автомобилей. Это наиболее передовое техническое решение в области перевозок, погрузочно-разгрузочных работ, а также ведения складского хозяйства. В зависимости от отрасли, в которой планируется применять КМУ, его можно поставить на базу шасси того или иного автомобиля. Теперь можно забыть об отдельно работающем кране и грузовом автомобиле. Сегодня используем всё в одном.
Теперь можно забыть об отдельно работающем кране и грузовом автомобиле. Сегодня используем всё в одном.
Но обо всем по порядку…
| Кран-манипулятор Amco Veba 815 T2S на базе «Урал-4220-0111» |
Одной из последних разработок в данной области являются краны-манипуляторы итальянской фирмы Amco Veba (давно пользующейся успехом в Германии, Канаде, Норвегии, Австралии и других странах). Поставив их на базу серийных грузовиков отечественного производства, специалисты нижегородского предприятия «Чайка-Сервис», предложили российскому покупателю качественно новый продукт.
Симбиоз крана и грузовой автомобильной платформы позволяет увеличить интенсивность использования техники для транспортировки грузов, уменьшить до минимума ручной труд при погрузке и разгрузке и сократить при этом количество занятых людей и единиц техники.
Основной отличительной особенностью КМУ марки Amco Veba является весьма широкая линейка по грузоподъемности с грузовым моментом от 1 до 80 тс·м и вылетом стрелы от 1 до 22 м. Сама конструкция крана предполагает несколько типовых решений, позволяя обеспечить высокую компактность стрелы в сложенном состоянии. А плавности хода итальянских КМУ можно только позавидовать.
Сама конструкция крана предполагает несколько типовых решений, позволяя обеспечить высокую компактность стрелы в сложенном состоянии. А плавности хода итальянских КМУ можно только позавидовать.
Все конструкции кранов-манипуляторов модельного ряда соответствуют требованиям стандарта DIN 15018 и сертифицированы на соответствие европейскому стандарту ИСО 9001.
| Кран-манипулятор Amco Veba 807 T2S на базе КамАЗ-4308 |
Краны надежно служат по 20…25 лет, так как их производят из высококачественных материалов. Длительный ресурс работы гидросистем достигнут за счет увеличенных сечений магистралей, соединяющих гидроприводы и объемы резервуара с рабочей жидкостью, препятствующих нагреванию масла в системе. Блок распределителей, выполненный с микроприводами, обеспечивает управление рычагами крана без особых усилий, что положительно сказывается на ресурсе крана.
Благодаря большому выбору навесного оборудования (различные траверсы, подъемная корзина-«люлька», клещевой захват для бревен, зажимные скобы, челюстной захват (ковш) для копания и погрузки) краны-манипуляторы могут работать с любым видом груза – сыпучие материалы, бревна, мусор, металл, бордюрный камень и др. Наибольшее применение они находят в сфере складского, коммунального хозяйства, строительстве, устройстве дорог и даже в области эксплуатации эвакуаторной техники. Последнее особенно актуально в сложных городских условиях, где не всегда удается погрузить и транспортировать разбитую или заглохшую технику к месту ремонта. Эвакуатор, оснащенный КМУ, способен за 10…15 минут произвести погрузку автомобиля на собственную платформу или сопровождающую машину и оперативно вывезти автомобиль с места происшествия.
Наибольшее применение они находят в сфере складского, коммунального хозяйства, строительстве, устройстве дорог и даже в области эксплуатации эвакуаторной техники. Последнее особенно актуально в сложных городских условиях, где не всегда удается погрузить и транспортировать разбитую или заглохшую технику к месту ремонта. Эвакуатор, оснащенный КМУ, способен за 10…15 минут произвести погрузку автомобиля на собственную платформу или сопровождающую машину и оперативно вывезти автомобиль с места происшествия.
| Эвакуатор с ломаной платформой, лебедкой и краном Amco Veba на базе ГАЗ-33104 «Валдай» |
Кстати, в начале нового года на ПП «Чайка-Сервис» была разработана, собрана и протестирована новая траверса. Разработанная модель принципиально отличается от старого образца: благодаря использованию облегченного профиля из специальной стали удалось на 10% снизить вес детали, но самое главное – траверса стала разборной..jpg) В сложенном виде ее можно убрать в инструментальный ящик, что позволяет водителю самому выбирать способ эвакуации: краном или лебедкой.
В сложенном виде ее можно убрать в инструментальный ящик, что позволяет водителю самому выбирать способ эвакуации: краном или лебедкой.
Для городских условий кран-манипулятор Amco Veba может быть установлен на шасси малотоннажного автомобиля («ГАЗель», «Валдай», «Бычок», «Зубрёнок» и пр.) и работать в труднодоступных, стесненных условиях: во дворах, узких переулках, вблизи линий электропередачи, на мостах и др.
Продукция производственного предприятия «Чайка-Сервис» помогает снизить прямые и косвенные расходы. Основным решающим фактором в использовании гидравлических кранов-манипуляторов стала экономическая целесообразность их применения на транспортных средствах. Реальный срок службы кранов более 20 лет, окупаемость происходит в первые 6…9 месяцев работы. На сегодняшний день производственное предприятие «Чайка-Сервис» производит более 20 видов спецтехники, оборудованной кранами-манипуляторами, и, следуя новым тенденциям рынка, постоянно совершенствует модельный ряд подобной спецтехники.
Подробную информацию о кранах-манипуляторах и весь спектр спецтехники «Чайка-Сервис» вы найдете на сайтах www.chaika-service.ru и www.amcoveba.ru
Разработка нового манипулятора с высокой маневренностью для роботизированной микрохирургии
Аннотация
Мы разрабатываем новую роботизированную систему, применимую для микро- и минимально инвазивных операций. Цель состоит в том, чтобы усилить ловкость хозяина-раба, который уменьшит масштаб текущих микрохирургических операций и минимизирует эффекты непроизвольного тремора и рывков в руках хирургов.В результате станут возможными новые процедуры для глаз, ушей, мозга и других критических органов, а показатели положительных результатов при обычных процедурах улучшатся. В номинальной конфигурации эта новая система микрохирургии с помощью роботов (RAMS) имеет ручной контроллер хирурга, непосредственно примыкающий к роботу. Система RAMS также потенциально применима к «телехирургии» — операциям, проводимым в локально-удаленных условиях и в операционных с задержкой по времени, — что считается важным при чрезвычайных ситуациях на местах и сценариях смещения специалистов.По состоянию на август 1994 года мы разработали и продемонстрировали новый робот с шестью степенями свободы (ведомый) для системы RAMS. Робот и связанные с ним декартовы элементы управления позволяют относительное позиционирование хирургических инструментов примерно до 25 микрон в неиндексированном и свободном от сингулярностей рабочем объеме примерно 20 кубических сантиметров. Это подразумевает возможность уменьшить масштаб входных движений руки в два-три раза и последующее выполнение сложных процедур в таких областях, как витрео-ретинальная хирургия, клинические испытания которой запланированы на 1996 год.Кроме того, благодаря инновационному управлению приводом, робот может выдерживать максимальные нагрузки до трех фунтов, что делает его применимым как для тонких манипуляций с микрохирургическими инструментами, так и для ловкого обращения с более мощными устройствами в минимально инвазивной хирургии.
Система RAMS также потенциально применима к «телехирургии» — операциям, проводимым в локально-удаленных условиях и в операционных с задержкой по времени, — что считается важным при чрезвычайных ситуациях на местах и сценариях смещения специалистов.По состоянию на август 1994 года мы разработали и продемонстрировали новый робот с шестью степенями свободы (ведомый) для системы RAMS. Робот и связанные с ним декартовы элементы управления позволяют относительное позиционирование хирургических инструментов примерно до 25 микрон в неиндексированном и свободном от сингулярностей рабочем объеме примерно 20 кубических сантиметров. Это подразумевает возможность уменьшить масштаб входных движений руки в два-три раза и последующее выполнение сложных процедур в таких областях, как витрео-ретинальная хирургия, клинические испытания которой запланированы на 1996 год.Кроме того, благодаря инновационному управлению приводом, робот может выдерживать максимальные нагрузки до трех фунтов, что делает его применимым как для тонких манипуляций с микрохирургическими инструментами, так и для ловкого обращения с более мощными устройствами в минимально инвазивной хирургии. В этой статье мы рассмотрим механическую конструкцию робота, реализацию элементов управления и наши предварительные эксперименты с ними. Наша сопроводительная устная презентация включает пятиминутную видеозапись некоторых результатов инженерных лабораторий, достигнутых на сегодняшний день.
В этой статье мы рассмотрим механическую конструкцию робота, реализацию элементов управления и наши предварительные эксперименты с ними. Наша сопроводительная устная презентация включает пятиминутную видеозапись некоторых результатов инженерных лабораторий, достигнутых на сегодняшний день.
© (1995) АВТОРСКОЕ ПРАВО Общество инженеров по фотооптическому приборостроению (SPIE). Скачивание тезисов разрешено только для личного использования.
Manipulator, Manipulator plugin, купить Manipulator, скачать Manipulator
Новый процессор для преобразования голоса.
Благодаря уникальным детальным алгоритмам Manipulator может радикально изменять тембр и высоту монофонического звука новыми и неизведанными способами.Manipulator столь же универсален, как и побуждает к творчеству: от тонко внушительной высоты тона и гармонизации до полноценного звукового искажения, которое оставит вас с совершенно новым звуком.
Превратите свой голос в новые удивительные звуки.
Особенности
- Согните и превратите свои звуки в новые
- Изменить тембр и высоту звука вокала и инструментов
- 10 различных эффектов с бесконечными комбинациями
- Изменить мелодии существующих спектаклей
- Создавайте гармонии, используя до 4 полифонических голосов
- Широкие возможности модуляции
- Обработка в реальном времени для живого выступления
- Поддерживает форматы плагинов VST / AU / AAX
Почти бесконечные манипуляции
Оснащенный 10 различными эффектами, включая обработку высоты тона, форманту, гармоники, размытие звука, псевдостерео и многое другое, Manipulator может преобразовывать обычный вокал в сложный, захватывающий новый звук.Другие монофонические и ритмические источники особенно хорошо работают с Manipulator.
Изменить высоту звука в реальном времени
Как и я хочу, Manipulator позволяет пользователям принимать MIDI-данные в режиме реального времени, позволяя управлять изменением высоты тона на лету с помощью MIDI-контроллера. Не понравилась вокальная мелодия в дубле? Играйте так, как вы это слышите! Манипулятор плавно меняет высоту тона и добавляет уникальную текстуру входящему звуку. Манипулятор поддерживает до 4-х полифонических голосов при использовании миди-входа.
Не понравилась вокальная мелодия в дубле? Играйте так, как вы это слышите! Манипулятор плавно меняет высоту тона и добавляет уникальную текстуру входящему звуку. Манипулятор поддерживает до 4-х полифонических голосов при использовании миди-входа.
Секретное оружие зараженного гриба
Большая часть фирменного звука Infected Mushroom — это их набор техник вокальных манипуляций. Большая часть вокала на их альбомах на самом деле искажена, отредактирована, нарезана и сильно обработана — все для того, чтобы заставить их звучать как синтезатор.
Нетрудно понять, почему создание совершенного плагина для преобразования голоса было очевидным следующим шагом после «Я хочу».
Благодаря уникальному процессу «Artistic Feedback», артисты используют постоянно меняющиеся прототипы для создания своей собственной музыки. Manipulator трансформировался и превратился в то, чем он является сегодня.На протяжении всего своего создания Infected Mushroom широко использовали его в своем выпуске 2017 года «Return to the Sauce».
Системные требования
Mac
- OS X 10.9 или новее (совместимость с macOS 11 Big Sur и чипами M1 на базе ARM)
- AAX, VST, VST3, AU — только 64-разрядная версия
- Intel Core 2 Duo или выше, минимум 4 ГБ ОЗУ
ПК
- Требования к оборудованию — ПК: Intel Core 2 Duo / AMD Athlon 64×2 или выше, минимум 4 ГБ ОЗУ
- AAX, VST, VST3 — только 64-разрядная версия
- Windows 7 SP1 или новее
Любые ссылки на какие-либо бренды на этом сайте / странице, включая ссылки на бренды и инструменты, предоставлены только в целях описания.Например, ссылки на бренды инструментов предназначены для описания звука инструмента и / или инструмента, использованного в сэмпле. Plugin Boutique не имеет (и не заявляет) о каких-либо отношениях с этими брендами или их одобрении. Любая репутация, связанная с этими брендами, принадлежит владельцу бренда. Plugin Boutique или его поставщики не несут ответственности за содержание продукта или точность описания. «RHODES» является зарегистрированным товарным знаком Joseph A Brandstetter.
«RHODES» является зарегистрированным товарным знаком Joseph A Brandstetter.
(PDF) Новая конструкция манипулятора для вспомогательных устройств
СПИСОК ЛИТЕРАТУРЫ
Акелла, М., Пешкин, М., Колгейт Э. и Ваннасупопрасит В., (1998), «Коботы — новая технология обработки материалов
. ”, Материалы зимнего ежегодного собрания
ASME.
Книга У., Чарльз Х., Дэвис Х. и Гомес М. (1996), «Концепция и реализация
пассивного робота, улучшающего траекторию», Труды ASME
Dynamic Systems Control Division, DSC- Vol.58, стр.633-638.
Колгейт Э., Ваннасупопрасит В. и Пешкин М. (1996), «Роботы-коботы для
совместной работы с человеком-оператором», Труды ASME Dynamic Systems
и Отдел управления, DSC-Vol. 58, стр. 433-440.
Колгейт, Дж. Э. и Пешкин, М. А., (2008), «Интеллектуальные вспомогательные устройства: революционная технология
для обработки материалов», Доступно в:
http://www.stanleyassembly. com/documents/en/Cobotics % 20IAD% 20White% 20Pa
com/documents/en/Cobotics % 20IAD% 20White% 20Pa
чел.pdf
Промышленные манипуляторы Dalmec, (2009 г.), Доступно на: http://www.dalmec.com/es/
Delnondedieu, Y. and Trocazz, J., (1995), «PADyC — пассивный манипулятор с динамикой
. Ограничение: прототип с двумя степенями свободы », Конференция IEEE по медицинской робототехнике и
Компьютерная вспомогательная хирургия, стр. 173-180.
Гонсалес де Сантос, П., Эстремера, Дж. Гарсия, Э. и Армада, М. (2003), «Манипуляторы
помогают с гипсовыми панелями в строительстве», Промышленный робот, Vol.30, No. 6, pp.
508-514.
Казеруни Х., (1995), «Технология усилителя мощности человека в Университете
, Калифорния, Беркли», DSC Vol. 57-2, IMECE Proceedings of the ASME Dynamic
Systems and Control Division, ASME.
Leite, AC, Lizarralde, F. и Hsu, L., (2006), «Гибридное управление роботом Vision-Force для задач
на неизвестных гладких поверхностях», Труды Международной конференции IEEE
по робототехнике и автоматизации, Орландо, Флорида.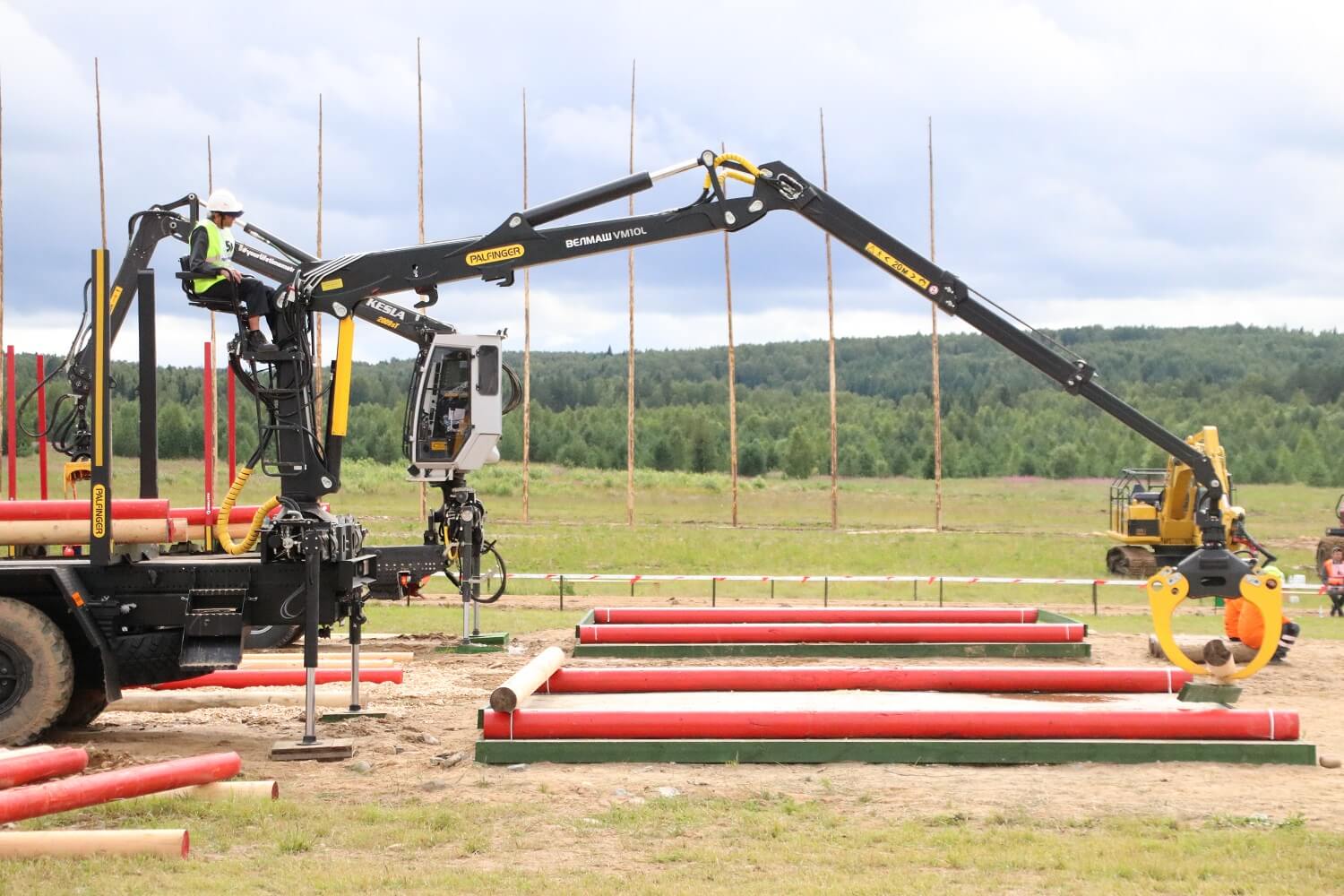
МакГи, Д. и Суонсон, П. (1999), «Метод управления интеллектуальным вспомогательным устройством
», Патент США 6204620, Доступно в:
http://www.freepatentsonline.com/6204620. html.
Мур, К. А., Пешкин, М. А. и Колгейт Дж. Э., (2003), «Реализация коботами
виртуальных путей и трехмерных виртуальных поверхностей», IEEE Transactions on Robotics и
Automation, Vol. 19, No. 2, pp. 347-350, апрель.
Объяснитель: брендирование Китая как валютного манипулятора в США предлагает несколько новых средств правовой защиты
ВАШИНГТОН (Рейтер) — Официальное объявление Китая валютным манипулятором может вызвать у США долгосрочный зуд.С. президента Дональда Трампа, но этот шаг предоставляет несколько новых инструментов, которые еще не использовались за два года торговых переговоров с Пекином.
Флаги Китая и США развеваются возле Бунда перед тем, как торговая делегация США встретится со своими китайскими коллегами для переговоров в Шанхае, Китай, 30 июля 2019 года. REUTERS / Aly Song
REUTERS / Aly Song
Министр финансов США Стивен Мнучин опубликовал заявление поздно в понедельник, после того, как Китай Центральный банк позволил юаню упасть ниже психологически важного уровня в семь юаней за доллар.
Этот ход является первым обозначением манипулятора с 1994 года, когда манипулятором был объявлен Китай.
Основная цель таких обозначений в соответствии с валютным законом США 1988 г. заключалась в том, чтобы заставить страну-нарушитель вести переговоры по поводу их практики обмена иностранной валюты, но Соединенные Штаты и Китай были заблокированы во всеобъемлющих торговых переговорах — в том числе по валютным вопросам — для более двух лет безрезультатно.
Трудно представить, как назначение изменит ситуацию, кроме как разжигать торговлю и валютную войну, сказал Марк Собель, бывший высокопоставленный представитель США.Сотрудник казначейства и МВФ, занимавшийся денежно-кредитными вопросами.
«Здесь немного. Средства правовой защиты очень слабые, и МВФ уже сказал, что думает о юанях », — сказал Собель, который сейчас работает с лондонским аналитическим центром Official Monetary and Financial Institutions Forum.
МВФ заявил в прошлом месяце, что оценка юаня соответствует более мягким экономическим показателям Китая, хотя доллар был переоценен на 6–12%.
ЧТО ПРОИСХОДИТ ДАЛЬШЕ
Если выясняется, что страна манипулирует своей валютой для получения торгового преимущества, Казначейство по закону обязано вступить в двусторонние переговоры с этой страной или работать через Международный валютный фонд для исправления ситуации.Цель состоит в том, чтобы устранить любое несправедливое преимущество, вызванное несправедливо обесцененной валютой.
Если решение не может быть найдено, президент может наложить различные санкции, например запретить финансирование Корпорацией зарубежных частных инвестиций в этой стране или исключить его из контрактов на государственные закупки США.
Китай не является крупным получателем государственных контрактов или финансирования от OPIC, которая позиционирует себя с новым финансированием в размере 60 миллиардов долларов, чтобы лучше конкурировать с собственной инициативой Китая по развитию инфраструктуры «Один пояс, один путь».
Трамп пообещал во время своей предвыборной кампании 2016 года, что объявит Китай валютным манипулятором в «первый день» своего президентства. Но более двух лет Мнучин отказывался делать это в полугодовых валютных отчетах Казначейства, полагаясь на критерии, которые показали сокращение глобального профицита текущего счета Китая и что уровень юаня был в основном стабильным после значительного падения в 2015 году.
In Май, Китай снова был освобожден от статуса манипулятора, даже с учетом новых более жестких критериев, согласно которым глобальное профицит текущего счета не должно превышать 2% от валового внутреннего продукта, поскольку торговые переговоры продолжаются.
РАЗГОВОРЫ С КИТАЕМ
Даже в середине 2000-х годов, когда многие считали, что китайский юань значительно недооценен, а его профицит текущего счета приближался к 10% ВВП, Соединенные Штаты воздерживались от назначения валютного манипулятора.
В то время Китай и администрация Джорджа Буша уже вели двусторонние переговоры по валютным и другим широким вопросам торгово-экономической реформы, которые назывались Стратегическим экономическим диалогом. Диалог был продолжен и переименован при президенте Бараке Обаме и с тех пор назван Трампом неэффективным.
Диалог был продолжен и переименован при президенте Бараке Обаме и с тех пор назван Трампом неэффективным.
Когда Конгресс США впервые принял закон о валютном обзоре в 1988 году, существовало несколько международных форумов для разрешения таких споров задолго до создания Всемирной торговой организации. В том же году министерство финансов объявило Тайвань и Южную Корею манипуляторами и в 1994 году ударило по Китаю таким заявлением. поменять режимы и снять обозначение манипулятора.
Китай унифицировал свою систему двойного обменного курса в 1994 году после последнего обозначения и с тех пор привязал стоимость своей валюты к доллару США.
Отчетность Дэвида Лодера и Андреа Шалал; Под редакцией Лизы Шумакер
США назвали Китай валютным манипулятором. Вот что это значит
То есть до недавнего времени. В понедельник китайские официальные лица позволили юаню упасть до самого низкого уровня за более чем десятилетие. Во вторник они установили обменный курс на уровне, который был ниже, чем в понедельник, но, тем не менее, выше, чем ожидало большинство аналитиков.
Так что же будет с Китаем, если наклейка приклеится?
В основном, Китай должен договориться о том, как сделать свою валюту более справедливой, с Соединенными Штатами и Международным валютным фондом, который регулирует несколько международных руководящих принципов, установленных в отношении валюты. Поскольку I.M.F. только что определили, что китайская валюта оценена справедливо, эти переговоры вряд ли продвинутся далеко.
Но это определение, вероятно, вызовет недовольство китайских чиновников, которые очень сопротивлялись тому, чтобы их называли манипуляторами с валютой, сказал Тони Фратто, партнер Hamilton Place Strategies и бывший сотрудник министерства финансов.
И если недавнее обесценение Китая станет началом тенденции, это может иметь гораздо более серьезные последствия для мировой экономики.
Более дешевый юань нанесет вред американским экспортерам и подорвет эффективность тарифов Трампа. Это также нанесет ущерб экспортерам в Европе, Японии и других странах. И это может создать рыночное давление на Южную Корею, Тайвань и другие страны, которые конкурируют в аналогичных отраслях, с целью девальвации своих валют, потенциально нарушая торговые и инвестиционные потоки.
И это может создать рыночное давление на Южную Корею, Тайвань и другие страны, которые конкурируют в аналогичных отраслях, с целью девальвации своих валют, потенциально нарушая торговые и инвестиционные потоки.
г.Трамп также мог использовать этот ярлык для оправдания дальнейших действий в отношении Китая, включая, возможно, более высокие тарифы.
Стефани Сигал, старший научный сотрудник Центра стратегических и международных исследований, сказала, что действия с валютой «открыли новый этап в торговой войне между США и Китаем, которая рискует выйти из-под контроля».
«Готовность Китая допустить обесценивание валюты, вероятно, была направлена на то, чтобы напомнить президенту об обратных сторонах эскалации действий», — сказала она. «Если это была идея, она не дала желаемого эффекта.”
Жанна Смиалек, Кейт Брэдшер и Александра Стивенсон представили материалы.
Разработка нового гибкого манипулятора для малоинвазивной хирургии
Разработка нового гибкого манипулятора, объединяющего датчики контактного усилия и датчики формы для MIS (малоинвазивной хирургии).

Существует ряд проблем, связанных с существующими иглодержателями и захватами для малоинвазивной хирургии. Они интегрированы в жесткий цилиндрический полый стержень, поэтому рабочее пространство и маневренность этих устройств ограничены при доступе к небольшим отверстиям и узким пространствам в теле, а их использование может привести к повреждению мягких тканей и органов, поэтому пациенты могут страдать от последствий. после операции.
Чтобы преодолеть барьеры, присущие таким обычным медицинским устройствам, были разработаны гибкие манипуляторы. Хотя рабочее пространство и маневренность гибкого манипулятора превосходят таковые у обычных манипуляторов, есть и другие проблемы, которые необходимо преодолеть: измерение его формы и измерение силы его тела. Чтобы облегчить распознавание формы, были предложены различные методы с помощью машинного зрения (камера) и волоконной брэгговской решетки (FBG) для гибких манипуляторов.
Показатели чувствительности очень точны, но устройство под названием «опросчик», которое может определять значения деформации от ВБР, прикрепленных к механическому изгибу датчика, стоит около 20000 фунтов стерлингов, а изготовление датчика изгиба слишком сложно, поэтому на его изготовление уходит много времени. Это.Кроме того, это требуется для фильтрации электрических шумов и температурной компенсации, а максимальные измеряемые диапазоны частот срабатывания ограничены до 50 Гц.
Это.Кроме того, это требуется для фильтрации электрических шумов и температурной компенсации, а максимальные измеряемые диапазоны частот срабатывания ограничены до 50 Гц.
В некоторых устройствах датчики силы тела встроены в каждое из сочленений манипулятора. В зависимости от формы манипулятора датчики измеряют внешние силы и внутренние силы (вызванные проводами или давлением воздуха), при этом внешняя сила не связана с механической математической моделью. Однако разделение внешней силы довольно сложно, потому что математическая модель не всегда предсказуема.
Геометрия обычных датчиков силы / крутящего момента не подходит для встраивания в гибкий манипулятор, поскольку в них нет достаточного пространства, позволяющего пропустить через него провода или трубы.
По этим причинам в этом проекте мы приступили к разработке нового гибкого манипулятора , объединяющего датчики контактного усилия и датчики формы с использованием оптоэлектронных датчиков . Основное преимущество этих датчиков контактного усилия и формы состоит в том, что они могут очень точно измерять углы (формы) изгиба и значения внешней силы, при очень небольших затратах и просты в изготовлении.Кроме того, они очень стабильны с максимальной измеряемой частотой срабатывания более 10 кГц и низким электрическим шумом.
Основное преимущество этих датчиков контактного усилия и формы состоит в том, что они могут очень точно измерять углы (формы) изгиба и значения внешней силы, при очень небольших затратах и просты в изготовлении.Кроме того, они очень стабильны с максимальной измеряемой частотой срабатывания более 10 кГц и низким электрическим шумом.
Эта технология также была принята для работы с приложениями, определяющими форму, для тактильных перчаток и реабилитационных устройств.
Публикации
[1] В. Ли, Ю. Но, Б. Шин, Ю. Ким, Управление с обратной связью миниатюрных колебательных электромагнитных приводов с использованием миниатюрного оптоэлектронного датчика, Труды Корейского общества инженеров-механиков — A, vol.45, № 5, стр. 361-366, 2021; DOI: 10.3795 / KSME-A.2021.45.6.515
[2] Д. Осман; X. Du; В. Ли; Ю. Но, Оптический датчик измерения углов шарниров на основе оптоэлектронного датчика для роботов-манипуляторов, 2020 8-я Международная конференция по управлению, мехатронике и автоматизации (ICCMA), 2020; DOI: 10. 1109 / ICCMA51325.2020.9301526.
1109 / ICCMA51325.2020.9301526.
[3] JHB Koh, T. Jeong, S. Han, W. Li, K. Rhode, Y. Noh, Подход к измерению формы гибких манипуляторов на основе оптоэлектронных датчиков, Конференция IEEE Engineering in Medicine and Biology (EMBC), стр. .3199-3203, 2019; DOI: 10.1109 / EMBC.2019.8856882.
[4] Ю. Но, С. Хан, П. Гавенда, В. Ли, С. Саре, К. Род, Датчик контактного усилия на основе S-образных лучей и оптоэлектронные датчики для гибких манипуляторов для минимально инвазивной хирургии (MIS) , IEEE Sensor Journal, стр. 3487-3495, 2019; DOI: 10.1109 / JSEN.2019.2945163.
[5] Ю. Но, П. Гаведа, М. Стрит, Дж. Лоуренс, С. Хан, В. Лин, Дж. Фрас, К. Алтофер, К. Роуд, Датчики контактной силы, измеряющие компоненты тангенциальной силы для гибких манипуляторов. , 2-я конференция IEEE UKI РАН, 2018.
[6] Т. Чон, Й. Но, С. Хан, К. Род, Определение формы с помощью оптоэлектронных датчиков для гибких манипуляторов, 2-я конференция IEEE UKI RAS, 2018.
Награды [1] «Совместная награда, занявшая второе место», 2-я конференция IEEE UK и Ирландия RAS 2018 г.
Знакомство с главными исследователями проекта
Д-р Йохан Но — он получил свою первую Б.Sc. степень бакалавра машиностроения, Сеульский национальный университет науки и технологий, Корея (2002 г.), и его вторая степень бакалавра наук. степень факультета электротехники Университета Йонсей, Корея (2004 г.). Он получил степень магистра наук. и к.т.н. на факультете науки и техники (робототехника) Университета Васэда, Токио, Япония, в 2007 и 2011 годах соответственно. После этого он работал научным сотрудником по робототехнике на факультете биомедицинской инженерии и информатики Королевского колледжа Лондона.Во время учебы в докторантуре и докторантуре в Великобритании и Японии он изучил и предложил большое количество роботизированных систем для использования в медицине и здравоохранении в Японии, Корее и Великобритании. Результатом его работы стало более семидесяти рецензируемых статей, в том числе шестнадцать журнальных статей и более семидесяти статей в ведущих журналах и конференциях по робототехнике. На данный момент у него есть одиннадцать опубликованных патентов. Ему повезло, что он имел возможность участвовать в процессе коммерциализации ряда совместных проектов между академическими кругами и промышленностью.Будучи амбициозным в направлении исследования, которое рассматривает коммерциализацию разработанной системы в начале проекта, привело к успешной коммерциализации проектов, и соответствующие продукты теперь продаются на международном рынке. Он способствовал многим совместным действиям между группами робототехники в Великобритании. , ЕС и Япония через внутренние и международные совместные проекты (ЕС-проект STIFF-FLOP, грант № 287728), (проект Wellcome Trust IEH iFIND, грант № 102431) и (Robotics AdvancedMedical Cluster, Япония), а также активный член сообщества робототехники (IEEERAS, EMBS, ASME, RSJ, JSCAS) и помогал в организации конференций RSJ, ROMANSY, ICCAS, ROBIO, ICRA и EMBC с 2008 года.
Результатом его работы стало более семидесяти рецензируемых статей, в том числе шестнадцать журнальных статей и более семидесяти статей в ведущих журналах и конференциях по робототехнике. На данный момент у него есть одиннадцать опубликованных патентов. Ему повезло, что он имел возможность участвовать в процессе коммерциализации ряда совместных проектов между академическими кругами и промышленностью.Будучи амбициозным в направлении исследования, которое рассматривает коммерциализацию разработанной системы в начале проекта, привело к успешной коммерциализации проектов, и соответствующие продукты теперь продаются на международном рынке. Он способствовал многим совместным действиям между группами робототехники в Великобритании. , ЕС и Япония через внутренние и международные совместные проекты (ЕС-проект STIFF-FLOP, грант № 287728), (проект Wellcome Trust IEH iFIND, грант № 102431) и (Robotics AdvancedMedical Cluster, Япония), а также активный член сообщества робототехники (IEEERAS, EMBS, ASME, RSJ, JSCAS) и помогал в организации конференций RSJ, ROMANSY, ICCAS, ROBIO, ICRA и EMBC с 2008 года.
Связанные исследовательские группы
Цифровое производство — Находясь в авангарде решений для создания интеллектуальных машин, мы создаем операционную основу для цифровой трансформации в Индустрию 4.0.
Робототехника и автоматизация — Мы проводим исследования мирового уровня в области робототехники и автономных систем, используя и исследуя возможности для разработки инновационных решений для промышленных и социальных приложений.
Последнее изменение проекта 10.09.2021
Компания Omron представит новый автономный мобильный манипулятор, вакуумные захваты robotiq и многое другое на PACK EXPO 2019
HOFFMAN ESTATES, IL, 28 августа 2019 г. — Стенд Omron Automation Americas на выставке PACK EXPO 2019 в Лас-Вегасе станет уникальной возможностью для изучить производственное оборудование ближайшего будущего в рамках широкомасштабной интерактивной демонстрации.В частности, нововведениями являются новый автономный мобильный манипулятор компании и интеграция коллаборативного робота Omron серии TM и вакуумных захватов Robotiq.
- Решение Omron для автономных мобильных манипуляций поддерживает гибкое производство и повышает операционную эффективность за счет интеграции самонавигационных мобильных роботов LD с коллаборативной роботизированной рукой Omron.
- Вакуумные захваты Robotiq AirPick и EPick теперь совместимы с коллаборативными роботами Omron. Эти полностью настраиваемые вакуумные захваты представляют собой эффективное и недорогое решение, которое помогает автоматизировать такие приложения, как обслуживание машин, сбор и размещение, упаковка и сборка.
 Эти полностью настраиваемые вакуумные захваты представляют собой эффективное и недорогое решение, которое помогает автоматизировать такие приложения, как обслуживание машин, сбор и размещение, упаковка и сборка.
Эти полностью настраиваемые вакуумные захваты представляют собой эффективное и недорогое решение, которое помогает автоматизировать такие приложения, как обслуживание машин, сбор и размещение, упаковка и сборка.На выставке будет представлен широкий спектр передовых технологий самовывоза, лазерной гравировки, мобильных и коллаборативных роботов и многое другое — все они будут работать под руководством человека, чтобы настроить и упаковать продукт для посетителей. Посетители стенда получат персонализированную банку с конфетами, собранную в результате сотрудничества и гармонии между людьми и машинами.В дополнение к этим аттракционам, которые будут проходить на стенде Omron № LS-5970 , в совершенно новой зоне робототехники PACK EXPO будет находиться коллаборативный робот, играющий в кости, созданный Omron.
Зона робототехники также станет местом выступления Кейта Керстена, менеджера группы промышленного маркетинга Omron Automation Americas, на тему «Работающее будущее: роль автоматизации в будущем упаковки». В 13:00 23 сентября и в 14:00 25 сентября Керстен расскажет о скорости, с которой технологии автоматизации, особенно робототехники, станут реальностью на рабочем месте, и о влиянии, которое они могут оказать на занятость и производительность на рабочем месте. упаковочная промышленность.
В 13:00 23 сентября и в 14:00 25 сентября Керстен расскажет о скорости, с которой технологии автоматизации, особенно робототехники, станут реальностью на рабочем месте, и о влиянии, которое они могут оказать на занятость и производительность на рабочем месте. упаковочная промышленность.
Решения Omron способствуют достижению гармонии в производственных цехах за счет повышения безопасности, скорости и эффективности за счет программ искусственного интеллекта, которые ежедневно учатся на процессах. Люди могут безопасно взаимодействовать с мобильными роботами для совместной работы Omron, которые разработаны с учетом потребностей рабочих. На фабрике будущего люди и машины будут работать вместе, чтобы удовлетворить потребности в гибкости, настройке, полной отслеживаемости продукции и более высоких стандартах безопасности труда.
Любой, кто хочет узнать больше о будущем производства, обязательно должен остановиться на стенде Omron в Нижнем Южном зале, а также в Зоне робототехники на выставке PACK EXPO, которая состоится 23-25 сентября.