
Хино кран-манипулятор, манипулятор HINO Ranger, фургон изотермический и другие готовые решения
HINO Серия 500 — универсальные и выносливые среднетоннажники для выполнения широкого спектра задач. Такие автомобили предназначены для осуществления городских и междугородних маршрутов. Каждая модель обладает высокой маневренностью, независимо от того фургон это или кран-манипулятор.
Шасси GD позволяет установить множество надстроек и подготовить автомобиль под любые пожелания клиента.
Варианты надстроек на шасси Хино 500
Одними из наиболее часто встречающихся кузовов на базе шасси HINO 500 Серии GD являются:
Кран-манипулятор Хино
Спецтехника для погрузки и перевозки стройматериалов и оборудования. Востребована как в строительной, так и в ремонтной и производственной сферах. Кран-манипулятор HINO также может выступать в качестве эвакуатора.
Бортовая платформа + Тент
Универсальное транспортное решение, позволяющее поместить под тент крупногабаритную продукцию.
Фургон-рефрижератор
Предназначается для доставки продуктов, которые требуют соблюдения температурного режима. Рефрижератор, как и обычный промтоварный фургон и любую другую надстройку, отличает высокая надежность и долговечность.
Промтоварный и изотермический фургон
Оборудуется задней пневмоподвеской, если планируется использовать его для перевозки хрупких грузов.
Это далеко не все решения, которые могут быть созданы на базе шасси GD. В настоящее время HINO работает с более чем тридцатью производителями кузовов. Каждый кузовостроитель имеет определенный перечень надстроек, которые он вправе устанавливать на шасси HINO (например, только манипулятор HINO или автобетоносмеситель). Тем самым компания HINO улучшает качество готовых автомобилей, позволяя изготавливать кузова только компаниям-лидерам в своей области.
В каталоге надстроек на базе шасси HINO 500, кроме названных ранее, имеются: мусоровозная установка, кран-манипулятор HINO с шарнирно-сочлененным или тросовым креплением, мультилифт, автогидроподъемник и др.
Вне зависимости от того, какой кузов вы выберете (манипулятор HINO 500 (HINO Ranger) или фургон, автогидроподъемник HINO или самосвал), официальные дилеры HINO подготовят для Вас специальное коммерческое предложение и рассчитают стоимость интересующей модификации.
Манипулятор Хино Рейнджер 500 в Москве, Hino Ringer у официального дилера АвтоСпецЦентр
Краны-манипуляторы Hino 500
ГК АвтоСпецЦентр – официальный дилер Toyota Hino в Москве – предоставляет возможность купить манипуляторы на шасси Hino 500 (Хино Рейнджер) грузоподъёмностью 8 тонн на самых выгодных условиях. Всегда в продаже – краны-манипуляторы как тросового, так и гидравлического типа в самом широком ассортименте.
Мы являемся дилером ведущих производителей КМУ:
· Tadano (Япония) – тросовые краны
· UNIC (Япония) – тросовые краны
· EFFER (Италия) – гидравлические краны
· Amco Veba (Италия) – гидравлические краны (в том числе эвакуаторные)
У
каждого типа КМУ есть свои преимущества.
Гидравлические краны:
· более грузоподъёмные
· проще для погрузки бытовок
· значительно дешевле тросовых КМУ
· более широкий спектр КМУ
· возможность установки дополнительного оборудования (буры, грейферы, вилы, ковши, лебедки)
Тросовые краны:
· больший вылет
· возможность работы с грузом ниже поверхности земли
· меньше места под монтаж крана
Цены на манипуляторы Hino 500, характеристики и наличие интересующей техники в Москве просьба уточнять у специалистов отдела продаж наших дилерских центров по телефону

| Запросить цену Заказать звонок Хино 500 базируется на шасси средней грузоподъемности и комплектуется шестиметровой бортовой платформой, способной принять достаточно габаритный и даже длинномерный груз, который двигатель мощностью 260 л.м. доставит по назначению. Грузовики японской марки Hino давно известны на российском рынке. На асфальте, в городских условиях раскрывают все преимущества современной техники мирового уровня. Для того, чтобы самостоятельно осуществить погрузку разгрузку  Первые очень популярны благодаря большей грузоподъемности и надежности. Такой Hino с краном может быть укомплектован КМУ с грузовым моментом от 6 до 13 т/м. При этом тросовая КМУ обладает достаточно большим весом, но и с ней грузоподъемность автомобиля составит не менее 5-6 тонн. Стрела может быть выдвинута на 19 метров, на таком вылете можно поднимать до 300 кг. Преимуществом тросовых КМУ является способность опускать груз ниже поверхности земли: укладывать трубы в траншею, укладывать колодезные кольца. Гидравлические КМУ также востребованы, ведь они позволяют более гибко управлять стрелой, способной совершать гораздо более сложные движения. К ним удобно прикреплять различное навесное оборудование и автомобиль с манипулятором становится очень универсальным. К тому же гидравлические КМУ легче и дешевле тросовых. В ООО «СпецТехКомплект» вы сможете подобрать подходящие именно вам Среднетоннажные грузовые автомобили HINO 500Автомобили Хино-500 — среднетоннажные грузовики от японского производителя. На рынке представлены модели Hino серии 500 полной массой:
Грузоподъемность шасси составляет 8, 12, 14,5 тонн соответственно. Достоинствами 500 серии являются:
HINO серии 500 — идеальное решение для бизнеса. Грузовик позволяет снизить затраты и повысить комфорт перевозок. На рынок России HINO 500 поставляются только с шасси японского производства. Полная масса 12 т. шасси GDТехнические характеристики
Комплектация
Полная масса 17,5 т. шасси GH шасси GHТехнические характеристики
Комплектация
Полная масса 26 т. Самосвал FM Самосвал FMТехнические характеристики
Комплектация
ДополнительноГарантия и ТО шасси GD/GH 12/17,5 т
Операции по техническому обслуживанию:(стоимость норма / часа различается у дилеров) П – проверить, при необходимости отрегулировать, затянуть, очистить, заменить. * — при наличии (в зависимости от комплектации) Сервисно гарантийная книжка (0,6 Mb) Гарантия и ТО самосвал FM
Операции по техническому обслуживанию:(стоимость норма / часа различается у дилеров) П – проверить, при необходимости отрегулировать, затянуть, очистить, заменить. * — при наличии (в зависимости от комплектации) Сервисно гарантийная книжка (0,6 Mb) Дополнительное оборудованиеЕсли Вам необходимо установить дополнительное оборудование — Вы можете обратиться к нашему специалисту:
Мы предлагаем большой выбор качественного дополнительного оборудования разных производителей и моделей с соответствующей гарантией установки. С 2013 г. между дистрибьютором HINO и представительством немецкого производителя автономных автомобильных систем отопления EBERSPACHER в России действует соглашение о сотрудничестве, позволяющее клиентам HINO получить высококачественный продукт, а также быть уверенным в высокой культуре установки сотрудниками дилерских центрах HINO, прошедшие обучение в компании EBERSPACHER. Один из основных видов продукции EBERSPACHER Climate Control Systems – это система автономного подогрева двигателя и салона ТС. Жидкостные подогреватели двигателя Hydronic и воздушные отопители Airtronic давно известны на рынке и охватывают широкий спектр областей применения. Установить наиболее комфортную температуру в салоне автомобиля и управлять работой предпускового подогревателя очень легко с помощью устройств управления. Поставляемая на рынок России продукция устройств управления семейства EasyStart включает в себя устройства от простого таймера (EasyStart Timer, EasyStart Select) до пультов дистанционного управления (EasyStart Remote, EasyStart Remote Plus) и GSM-модулей (EasyStart Call, EasyStart Text). Жидкостные отопители EBERSPACHER работают независимо от двигателя и обладают двойным преимуществом: предварительный подогрев салона автомобиля и двигателя. Отопитель нагревает жидкость в системе охлаждения двигателя. Собственный насос отопителя EBERSPACHER обеспечивает циркуляцию охлаждающей жидкости по малому кругу охлаждения, в который подключен теплообменник салона. Для всех моделей HINO Серии 500 предназначены жидкостные отопители EBERSPACHER Hydronic M — D10W.
Цикл работы отопителяПри получении сигнала на запуск с устройства управления, отопитель выполняет следующие действия:
Преимущества шасси HINO-500
ООО «СпецТехКомплект « | СПЕЦПРЕДЛОЖЕНИЯВСЕ | ||||||||||
 Hino — это гарантия использования в производстве качественных технологий и материалов, обеспечивающих комфортную эксплуатацию автомобилей. В марке Хино сочетаются надежность, мощность и долгий срок службы.
Hino — это гарантия использования в производстве качественных технологий и материалов, обеспечивающих комфортную эксплуатацию автомобилей. В марке Хино сочетаются надежность, мощность и долгий срок службы. с.) / об/мин)
с.) / об/мин) Привод – гидравлический с пневматическим усилителем.
Привод – гидравлический с пневматическим усилителем. с.) / об/мин)
с.) / об/мин) Привод – гидравлический с пневматическим усилителем.
Привод – гидравлический с пневматическим усилителем. с.) / об/мин)
с.) / об/мин) Привод – гидравлический с пневматическим усилителем.
Привод – гидравлический с пневматическим усилителем. )
) Замена жидкости.
Замена жидкости.
 Замена жидкости.
Замена жидкости.

 Дополнительная функция отопителя позволяет автономно запустить вентилятор салонного отопителя по достижении определенной температуры. А в летний период отопитель EBERSPACHER Hydronic можно легко превратить в автономную систему вентиляции.
Дополнительная функция отопителя позволяет автономно запустить вентилятор салонного отопителя по достижении определенной температуры. А в летний период отопитель EBERSPACHER Hydronic можно легко превратить в автономную систему вентиляции.

 с.
с.Кран манипулятор HINO — HINO в Екатеринбурге
Кран манипулятор HINO — HINO в ЕкатеринбургеГлавная » Модельный ряд HINO » Кран манипулятор HINO
Краны-манипуляторы «ХИНО» используются в самых различных отраслях: от строительства до коммунального хозяйства. Они подходят для перевозки крупногабаритных грузов, а также используются при проведении монтажных, демонтажных или строительных работ. Такая техника применяется и в тех случаях, когда нужно переместить хрупкий или ценный груз и поместить его с высокой точностью, избежав при этом повреждений.
Они подходят для перевозки крупногабаритных грузов, а также используются при проведении монтажных, демонтажных или строительных работ. Такая техника применяется и в тех случаях, когда нужно переместить хрупкий или ценный груз и поместить его с высокой точностью, избежав при этом повреждений.
| Технические характеристики крана UNIC URV-374 | |
| Количество секций | 4 |
| Рабочий радиус, м | 0,67м — 9,81м |
| Максимальная грузоподъемность / при рабочем радиусе | 3030 кг на 2,6 м |
| Телескопирование стрелы, м | 3,41-10,00м |
| Высота поднятия крюка, м | 11,4м |
| 11,5 | |
| Угол поворота стрелы, град. | 360 |
| Вес установки, кг | 1880 |
Алюминиевая бортовая платформа 5500 х 2500 х 600 мм, пол — транспортная фанера с такелажными кольцами, боковая защита, противоподкатный брус.
| Технические характеристики крана UNIC URV554 | |
| Количество секций | 4 |
| Рабочий радиус, м | 0,78-11,0 |
| Максимальная грузоподъемность / при рабочем радиусе | 5050 кг на 2,5 м |
| Телескопирование стрелы, м | 3,90-11,25 |
| Высота поднятия крюка, м | 11,25 |
| 13,1 | |
| Угол поворота стрелы, град. | 360 |
| Ширина макимально выдвинутых аутригеров, м | 4,3 |
| Вес установки, кг | 1880 |
Борта откидные съёмные из алюминиевых досок, раскладная ступенька на заднем борту.
Высота бортов: 600мм.
Быстросъемные стойки пр-ва Италия.
Пол – влагостойкая фанера 27мм с противоскользящим покрытием.
По периметру пола установлены такелажные кольца для крепления груза.
Устройства освещения и световой сигнализации в соответствии с требованиями.
| Технические характеристики крана UNIC URV554 | |
| Количество секций | 4 |
| Рабочий радиус, м | 0,78-11,0 |
| Максимальная грузоподъемность / при рабочем радиусе | 5050 кг на 2,5 м |
| Телескопирование стрелы, м | 3,90-11,25 |
| Высота поднятия крюка, м | 11,25 |
| 13,1 | |
| Угол поворота стрелы, град. | 360 |
| Ширина макимально выдвинутых аутригеров, м | 4,3 |
| Вес установки, кг | 1880 |
- Алюминевая бортовая платформа 7500 х 2520 х 600 мм
- Пол: транспортная фанера с такелажными кольцами
- Боковая защита
- Противоподкатный брус
| Технические характеристики крана UNIC UR-V1504 | |
| Количество секций | 4 |
| Рабочий радиус, м | 0,78-11,0 |
| Максимальная грузоподъемность / при рабочем радиусе | 13. 5тонн 5тонн |
| Телескопирование стрелы, м | 3,90-11,25 |
| Высота поднятия крюка, м | 24.5 |
| Max высота подъема, м | 27,8 |
| 13,1 | |
| Угол поворота стрелы, град. | 360 |
| Ширина максимально выдвинутых передних аутригеров, м | 5,7 |
| Вес установки, кг | |
- Габаритные размеры КМА: Д×Ш×В 11000×2520×3500(мм)
- Снаряженная масса автомобиля 8 785 кг + Вес КМУ
- Грузоподъемность автомобиля 21 915 кг – Вес КМУ
Покупайте грузовой автомобиль HINO в автосалоне «Восточный Ветер». Мы предлагаем автомобили по выгодным ценам, а также лучшие условия кредитования и лизинга автомобилей
×
Сохраняем данные
Мы Вам обязательно перезвоним!
Ой. .. Программисты что-то сломали 🙁 Попробуйте чуть попозже!
.. Программисты что-то сломали 🙁 Попробуйте чуть попозже!
×
Мы уже набираем Ваш номер!
Ой… Программисты что-то сломали 🙁 Они скоро починят, а пока Вы можете сами набрать нас!
×
Вы были у нас на сайте .
Вы нашли то, что искали?
| Характеристики бортового автомобиля HINO 300 с гидроманипулятором | |
| Общие характеристики | |
| Параметр | Показатель |
| тип: | борт+кран |
| марка: | HINO 300 |
| левый руль | |
| Шасси | |
| максимальная масса, кг: | 7500 |
| грузоподъемность: | 3500 кг |
| колесная формула: | 4×2 |
| ABS | |
| Транспортные габариты | |
| длина, мм: | 7520 |
| ширина, мм: | 2170 |
| высота, мм: | 2700 |
| Кабина | |
| количество сидений: | 3 |
| гидроусилитель руля | |
| Двигатель | |
| тип: | рядный, 4-х тактный, 4 цилиндра |
| топливо: | дизельное |
мощность, л. с.: с.: | 136 (100 кВт) при 2500 об/мин |
| рабочий объем, см3: | 4009 |
| турбонаддув | |
| интеркулер, common-rail, Euro-3 | |
| Трансмиссия | |
| коробка передач: | механическая |
| количество передач: | 5 |
| Размеры бортовой платформы | |
| длина, м: | 5040 |
| ширина, м: | 2020 |
| высота, м: | 500 |
| количество секций: | 2 |
| материал обшивки: | алюминий |
| материал пола: | фанера |
| Крановая установка UNIC | |
| модель: | UR-V294 |
| тип стрелы: телескопическая | |
| жесткость стрелы: | повышенная (6 граней) |
| количество секций стрелы: | 4 |
| грузоподъемность: | 3030 кг |
| грузовой момент, кг/м: | 4848 |
| грузоподъемность без выдвижения стрелы, кг: | 3030 |
| грузоподъемность при выдвижении одной секции, кг: | 980 |
| грузоподъемность при выдвижении двух секций, кг: | 580 |
| грузоподъемность при выдвижении трёх секций, кг: | 330 |
| расход масла, л/мин: | 53 |
| давление масла, кг/см3: | 210 |
| объем масляного бака, л: | 22 |
| скорость выдвижения, м/сек: | 5,73м / 11сек |
| скорость подъема, °/сек: | 1 — 76- / 5 сек |
Кран манипулятор Hino 300, 500 и 700 серий
Универсальная серия спецтехники, состоящая из полноценного бортового грузового автомобиля и крано-манипуляторной установки определенной грузоподъёмности — это манипулятор Хино. Японские машины получили широкое применение в различных погрузо-разгрузочных и монтажных работах, при транспортировке разнообразных конструкций, материалов и оборудования. Особенно актуальными манипуляторы марки Хино являются в условиях небольших объектов, где существует необходимость использования КМУ в ограниченном пространстве.
Японские машины получили широкое применение в различных погрузо-разгрузочных и монтажных работах, при транспортировке разнообразных конструкций, материалов и оборудования. Особенно актуальными манипуляторы марки Хино являются в условиях небольших объектов, где существует необходимость использования КМУ в ограниченном пространстве.
Особенности КМУ Hino
Манипуляторы марки Hino представлены несколькими сериями, каждая из которых имеет собственные технические характеристики.
Hino 300
Серия Hino 300 включает в себя несколько модификаций автотехники, имеющих вес 6500 кг при грузоподъёмности в 4,5 тонны и длине борта до 504 см. На автомобилях используется четырехцилиндровый дизельный мотор с турбонаддувом и интеркулером, развивающий мощность до 150 л. с., и полностью синхронизированная механическая пятиступенчатая КПП. Автомобиль имеет колесную формулу 4×2, в которой обе подвески являются зависимыми.
Тормозная система автомобиля с манипулятором Hino 300 включает в себя вентилируемые дисковые и дополнительный горный тормоза. Манипулятор оснащён трехместной, достаточно комфортной кабиной, не предусматривающей дополнительного спального места. Крано-манипуляторная установка Хино 300 представляет собой телескопическую 4-секционную стрелу, обладающую грузовым моментом 4848 кг и позволяющую перемещать грузы массой до 3 тонн. В случае выдвижения всех трех секций показатель грузоподъёмности снижается до 330 кг.
Манипулятор оснащён трехместной, достаточно комфортной кабиной, не предусматривающей дополнительного спального места. Крано-манипуляторная установка Хино 300 представляет собой телескопическую 4-секционную стрелу, обладающую грузовым моментом 4848 кг и позволяющую перемещать грузы массой до 3 тонн. В случае выдвижения всех трех секций показатель грузоподъёмности снижается до 330 кг.
Hino 500
Краны-манипуляторы серии Hino 500 представляют собой многофункциональную спецтехнику для осуществления работы с грузами в любых условиях без необходимости привлекать вспомогательное погрузочное оборудование. Машины характеризуются эстетичным внешним видом, эргономичностью трёхместной кабины класса стандарт, предусматривающей спальное место, и удобством управления. Автомобиль массой в 12 тонн способен перевозить до 6 тонн груза. Двигатель машины — шестицилиндровая дизельная установка, имеющая мощность 260 л. с. и оснащенная турбонаддувом. Коробка передач — механическая с 6 ступенями и полной синхронизацией. Транспортное средство предусматривает колесную формулу 4×2.
Транспортное средство предусматривает колесную формулу 4×2.
Крано-манипуляторная установка Hino 500 оборудована четырёхсекционной стрелой с телескопическим вылетом, максимальная грузоподъемность которой составляет 3030 кг, расстояние вылета стрелы — до 12,3 метра. В зависимости от количества выдвинутых секций грузоподъемность принимает следующие значения: одна секция — 1180 кг, две — 680 кг, три секции — 480 кг.
Hino 700
Машины серии Хино 700 относятся к категории тяжелой спецтехники. Кроме того, машина Хино серии 700 имеет колесную формулу 6×4 и оснащается двухместной кабиной с одним спальным местом. КМУ транспортного средства с манипулятором Hino 700 предусматривает стрелу телескопического типа, характеризующейся увеличенными показателями жёсткости и способной поднимать до 3030 кг при грузовом моменте, равном 12,4 кг. В случае выдвижения всех трех секций показатель грузоподъемности установки снижается до 830 кг. Стрела выдвигается со скоростью 727 см за 21,5 с.
Серия Хино Рейнджер
В рамках серии Рейнджер выпускаются грузовики двух категорий, отличающихся полной массой:
- первая группа включает в себя машины весом от 7500 до 8000 кг;
- вторая — более 10,3 т.
Облегченные модели серии Ranger, выпускаемые под марками FC, FD и FX, имеют габаритную длину от 770 до 1200 см. Кабина может быть обычной или широкой, трансмиссия — шестиступенчатая. Спецтехника указанных моделей может оснащаться рядными дизельными двигателями с 5 цилиндрами и объёмом 4,7 л при мощности в 180 л. с. или 6,4 л при 210–225 л. с.
Кроме того, манипулятор Hino Ranger может быть укомплектован 6-цилиндровой силовой установкой объемом 8 л и мощностью в 200 л. с., работающей на сжатом природном газе. Автомобили оснащаются пневмогидравлическими тормозами барабанного типа. Единственным полноприводным автомобилем в облегченной серии «Рейнджер» является модель FX с пятицилиндровой дизельной силовой установкой, технические характеристики которой имеют следующие значения: объём 6,4 л при мощности в 220 л. с. Полный вес машины составляет 8400 кг при минимальной грузоподъемности в 4000 кг.
с. Полный вес машины составляет 8400 кг при минимальной грузоподъемности в 4000 кг.
Группа более тяжелых манипуляторных автомобилей Хино Рейнджер включает в себя двухосные грузовые машины марок FE, FG, FJ, GD (колесная формула 4×2) и GX (4×4). Полный вес различных моделей составляет от 10,3 до 14,8 т. Кроме того, серия включает в себя манипулятор Hino модели GK с колесной формулой 6×4 и 6-ступенчатой механическую КПП. Указанная модель оснащается рядным дизельным мотором с 5 или 6 цилиндрами. Конструкция автомобилей с манипулятором Ranger также предусматривает возможность постепенного выдвижения стрелы, в результате чего грузовой момент используется максимально эффективно.
Отличительной особенностью манипуляторов Hino серии Ranger является высокий уровень надёжности, благодаря которой машины получили широкую популярность во всем мире.
Сфера применения
Манипуляторы Хино оптимально подходят для перемещения в пространстве, погрузки, выгрузки и перевозки относительно негабаритных грузов, масса которых составляет не более 5 тонн. При этом важной особенностью рассматриваемой спецтехники является способность выполнять работы с грузами, находящимися за препятствиями или ниже уровня земли, в частности — при обустройстве колодцев или траншей.
При этом важной особенностью рассматриваемой спецтехники является способность выполнять работы с грузами, находящимися за препятствиями или ниже уровня земли, в частности — при обустройстве колодцев или траншей.
Важнейшими преимуществами манипуляторов Хино являются простота конструкции и превосходные показатели надёжности, прочности и долговечности. Крюк оснащён тросовой подвеской, благодаря чему заметно облегчаютсяманипуляции с грузом, включая возможность контроля за его положением во время перемещения. Манипуляторы, включая серию Хино 700, также оснащены функцией плавного подъёма и опускания, позволяющей работать даже с хрупкими и непрочными предметами без угрозы для их целостности.
Благодаря перечисленным характеристикам и особенностям манипуляторная техника серии Hino является отличным вариантом для применения в строительной отрасли, складском, лесном или коммунальном хозяйстве. Манипуляторные установки способны успешно выполнять перемещение самых разнообразных видов грузов.
- Различные материалы, включая строительные;
- Контейнеры и емкости различных габаритов;
- Гаражные строения и бытовки;
- Относительно компактная спецтехника;
- Многие другие виды грузов.
Помимо грузоперевозок и строительных работ, КМУ Hino широко применяются при ликвидации завалов и других последствий чрезвычайных ситуаций.
Количество отзывов Оставить отзывСортировать по: Самые последниеНаивысший баллНаиболее полезноХудшая оценка
Будьте первым, чтобы оставить отзыв.
Проверенный отзыв
{{{ review.rating_title }}} Показать еще Оставить отзывHino ranger технические характеристики. Где применяется манипулятор Хино и что это такое
Краны-манипуляторы японской фирмы Hino Motors, уже около полувека являющейся частью корпорации Toyota, широко известны во всем мире. И если раньше подобная техника была более популярна в восточной части России, то в последнее время этот бренд приобретает доверие и в западной её части.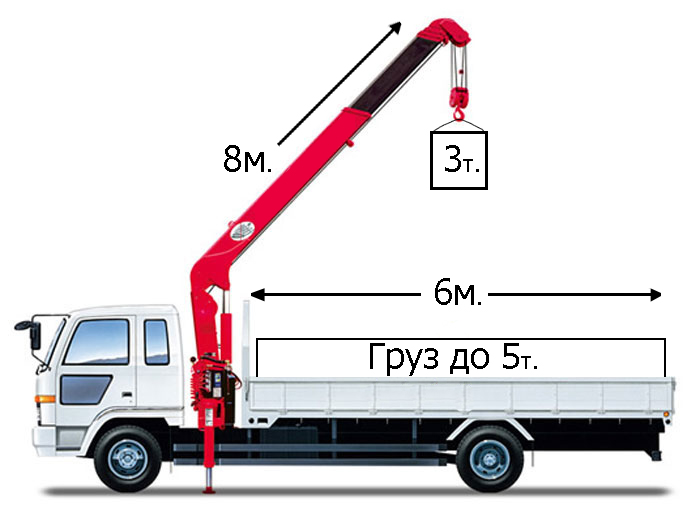
Манипулятор Hino – это универсальная спецтехника, представляющая собой полноценную бортовую машину с крановой установкой различной грузоподъемности. Использование подобных машин существенно облегчает процесс погрузо-разгрузочных работ, установки различного оборудования и транспортировки разных видов материалов. Незаменимой эта техника становится на небольших объектах, которые требуется оснастить подъемным устройством на ограниченной территории.
К тому же манипулятор – это полноценное транспортное средство, позволяющее перевозить крупногабаритные грузы на значительные расстояния, даже в условиях бездорожья, где более тяжелая техника проехать не сможет. Мобильность и высокая производительность делают эту технику надежным помощником при выполнении целого спектра работ, а благодаря сочетанию в одном автомобиле бортового грузовика и погрузчика в некоторых случаях дает возможность обойтись без использования дополнительной спецтехники.
Модификации и основные характеристики манипуляторов Hino 300 серии
Производитель предлагает несколько серий манипуляторов Hino, каждая из которых предназначена для выполнения определенных задач. Итак, серия Hino-300 имеет несколько модификаций и представляет собой автомобили весом 6,5 тонн и грузоподъемностью 4,5 тонны. Длина борта – до 5,04 м. Машина оборудована 4-х цилиндровым дизельным двигателем с турбонадувом и интеркулером и имеет механическую полностью синхронизированную 5-ступенчатую коробку передач. Максимальная мощность составляет 150 л.с. Колесная формула – 4х2, передняя и задняя подвески зависимого типа.
Итак, серия Hino-300 имеет несколько модификаций и представляет собой автомобили весом 6,5 тонн и грузоподъемностью 4,5 тонны. Длина борта – до 5,04 м. Машина оборудована 4-х цилиндровым дизельным двигателем с турбонадувом и интеркулером и имеет механическую полностью синхронизированную 5-ступенчатую коробку передач. Максимальная мощность составляет 150 л.с. Колесная формула – 4х2, передняя и задняя подвески зависимого типа.
В машине установлены дисковые вентилируемые тормоза и дополнительный горный тормоз. Комфортная кабина манипулятора рассчитана на 3-х человек и не имеет дополнительного спального места. Крановая установка манипуляторов 300 серии выполнена в виде телескопической стрелы с 4 секциями. С её помощью можно поднимать грузы весом до 3 000 кг, а грузовой момент составляет 4848 кг. При выдвижении трех секций грузоподъемность гидроманипулятора — 330 кг. Стоимость такой техники — около 73,5 тыс. долларов.
Особенности КМУ Hino
Манипуляторы марки Hino представлены несколькими сериями, каждая из которых имеет собственные технические характеристики.
Hino 300
Серия Hino 300 включает в себя несколько модификаций автотехники, имеющих вес 6500 кг при грузоподъёмности в 4,5 тонны и длине борта до 504 см. На автомобилях используется четырехцилиндровый дизельный мотор с турбонаддувом и интеркулером, развивающий мощность до 150 л. с., и полностью синхронизированная механическая пятиступенчатая КПП. Автомобиль имеет колесную формулу 4×2, в которой обе подвески являются зависимыми.
Тормозная система автомобиля с манипулятором Hino 300 включает в себя вентилируемые дисковые и дополнительный горный тормоза. Манипулятор оснащён трехместной, достаточно комфортной кабиной, не предусматривающей дополнительного спального места. Крано-манипуляторная установка Хино 300 представляет собой телескопическую 4-секционную стрелу, обладающую грузовым моментом 4848 кг и позволяющую перемещать грузы массой до 3 тонн. В случае выдвижения всех трех секций показатель грузоподъёмности снижается до 330 кг.
Hino 500
Краны-манипуляторы серии Hino 500 представляют собой многофункциональную спецтехнику для осуществления работы с грузами в любых условиях без необходимости привлекать вспомогательное погрузочное оборудование. Машины характеризуются эстетичным внешним видом, эргономичностью трёхместной кабины класса стандарт, предусматривающей спальное место, и удобством управления. Автомобиль массой в 12 тонн способен перевозить до 6 тонн груза. Двигатель машины — шестицилиндровая дизельная установка, имеющая мощность 260 л. с. и оснащенная турбонаддувом. Коробка передач — механическая с 6 ступенями и полной синхронизацией. Транспортное средство предусматривает колесную формулу 4×2.
Машины характеризуются эстетичным внешним видом, эргономичностью трёхместной кабины класса стандарт, предусматривающей спальное место, и удобством управления. Автомобиль массой в 12 тонн способен перевозить до 6 тонн груза. Двигатель машины — шестицилиндровая дизельная установка, имеющая мощность 260 л. с. и оснащенная турбонаддувом. Коробка передач — механическая с 6 ступенями и полной синхронизацией. Транспортное средство предусматривает колесную формулу 4×2.
Крано-манипуляторная установка Hino 500 оборудована четырёхсекционной стрелой с телескопическим вылетом, максимальная грузоподъемность которой составляет 3030 кг, расстояние вылета стрелы — до 12,3 метра. В зависимости от количества выдвинутых секций грузоподъемность принимает следующие значения: одна секция — 1180 кг, две — 680 кг, три секции — 480 кг.
Hino 700
Машины серии Хино 700 относятся к категории тяжелой спецтехники. Кроме того, машина Хино серии 700 имеет колесную формулу 6×4 и оснащается двухместной кабиной с одним спальным местом. КМУ транспортного средства с манипулятором Hino 700 предусматривает стрелу телескопического типа, характеризующейся увеличенными показателями жёсткости и способной поднимать до 3030 кг при грузовом моменте, равном 12,4 кг. В случае выдвижения всех трех секций показатель грузоподъемности установки снижается до 830 кг. Стрела выдвигается со скоростью 727 см за 21,5 с.
КМУ транспортного средства с манипулятором Hino 700 предусматривает стрелу телескопического типа, характеризующейся увеличенными показателями жёсткости и способной поднимать до 3030 кг при грузовом моменте, равном 12,4 кг. В случае выдвижения всех трех секций показатель грузоподъемности установки снижается до 830 кг. Стрела выдвигается со скоростью 727 см за 21,5 с.
Технические характеристики манипуляторов Hino 500
Кран-манипулятор 500 серии – это функциональная техника, позволяющая выполнять погрузо-разгрузочные работы в любых условиях без привлечения вспомогательной погрузочной техники и отличающаяся привлекательным внешним видом, эргономичной кабиной и удобным управлением. Грузоподъемность автомобиля – около 6 тонн, а вес – 12 тонн. В машине установлен 6-цилиндровый дизельный двигатель с системой турбонадува мощностью 260 л.с. и механическая 6-ступенчатая полностью синхронизированная трансмиссия.
Колесная формула манипулятора Hino 300 – 4х2, кабина типа «стандарт» на 3-х человек с оборудованным спальным местом. Что касается крано-манипуляторной установки, то она имеет 4-х секционную телескопическую стрелу и следующие характеристики: максимальную грузоподъемность 3030 кг, и вылет стрелы до 12,3 м. Грузоподъемность при выдвижении одной секции составляет 1,18 тонну, двух — 0,68 тонны, а трех – 0,48 тонны. За 14 секунд стрела выдвигается почти на 7 метров. Цена за такую модель составляет примерно 115 тыс. долларов.
Что касается крано-манипуляторной установки, то она имеет 4-х секционную телескопическую стрелу и следующие характеристики: максимальную грузоподъемность 3030 кг, и вылет стрелы до 12,3 м. Грузоподъемность при выдвижении одной секции составляет 1,18 тонну, двух — 0,68 тонны, а трех – 0,48 тонны. За 14 секунд стрела выдвигается почти на 7 метров. Цена за такую модель составляет примерно 115 тыс. долларов.
Топливная аппаратура Common Rail — компании Denso, лицензия Bosch
Топливная аппаратура Common Rail — компании Denso, лицензия Bosch
Топливная аппаратура Common Rail — компании Denso, лицензия Bosch
Мотор одинаковый, с одинаковым моментом — значит, для грузовиков Hino 300 разной полной массы и сцепление может быть одинаковое, тем более что разница в массе не столь велика. Сцепление однодисковое, диафрагменное диаметром 325 мм, привод — гидравлический, причем с автоматической регулировкой. Не нужно лишний раз лезть под машину — регулировать свободный ход вилки.![]()
На «шеститоннике» установлена коробка передач модели Aisin М550 — та, которая ставилась на предыдущее поколение «трехсотки». Коробка полностью синхронизированная, пятиступенчатая, с картером из алюминиевого сплава. Диапазон передаточных чисел от 4,98 до 0,74. На более тяжелую версию теперь устанавливают шестиступенчатую коробку Isuzu MYY6S, у нее диапазон передаточных чисел от 5,98 на первой передаче до 0,76 на шестой. То есть первая передача получается более тяговитой, чем в пятиступенчатой коробке, а все остальные — наоборот, скоростные. Разница в числах около 0,25–0,4. Именно эту коробку ставят на Isuzu NPR, которые собирают в Елабуге. У нее тоже алюминиевый картер с вертикальным разъемом. Такой картер гораздо жестче, чем укрытый сверху крышкой: нет перекоса валов, лучше ходят подшипники и долговечнее зубчатые зацепления. Кроме того, говорят, что в этой КП установлены очень эффективные синхронизаторы. Переключение — тросами, легкое и довольно четкое, с небольшими ходами. Для установки коробки отбора мощности на обеих КП есть лючки — соответственно, для привода различных надстроек можно смонтировать гидронасос. Благодаря этому грузовик с бортовой платформой просто оснастить гидроманипулятором или смонтировать на его шасси эвакуатор.
Благодаря этому грузовик с бортовой платформой просто оснастить гидроманипулятором или смонтировать на его шасси эвакуатор.
Манипулятор Hino 700 — основные характеристики модели бортового автомобиля с КМУ
Манипулятор Hino 700 серии относится к тяжелой технике и имеет полную массу 30,7 тонн, а её максимальная грузоподъемность составляет 18 тонн. Автомобиль оснащен 6-цилиндровым дизельным двигателем мощностью 410 л.с. Трансмиссия механическая, имеет 7 передач. Колесная формула этого манипулятора Hino – 6х4. Длина борта – 7,83 м. В машине предусмотрено одновременное нахождение двух человек, имеется одно спальное место. Крановая установка имеет телескопический тип стрелы с повышенной жесткостью. Грузоподъемность стрелы – 3030 кг, а грузовой момент – 12,4 кг. При выдвижении трех секций грузоподъемность КМУ падает до 830 кг. Скорость выдвижения стрелы — 7,27 м за 21,5 сек., длина троса составляет 68 м. Стоимость манипулятора этой серии колеблется в районе 134,5 тыс. долларов.
Мнение
Алексей Свирин, генеральный директор ООО «Вектор-27», Москва
— Наша компания специализируется на экспедировании, транспортировке и хранении партий грузов. Собственный автопарк только начали формировать, марку и модель выбирали долго. Присматривались к среднетоннажникам Hyundai, Isuzu, европейским автомобилям. «Китайцев» в расчет сознательно не брали. Прислушались к рекомендациям одного нашего сотрудника, он родом с Дальнего Востока и хорошо знаком с подержанными праворульными Hino. Узнали, что теперь в России продаются новые машины Hino с левым рулем. Поэтому в ноябре 2010 года купили два Hino 300, то есть еще не нового поколения, а весной приобрели еще одну машину. Цена нас устроила, грузовиками довольны, хотя сразу же, зимой, пришлось купить два комплекта шин Michelin с более «зубастым» протектором, чем те, что стояли на автомобилях. Поломок автомобилей пока нет. На одной из машин были проблемы с холостым ходом, но обратились в сервис — там все наладили, заменили какую-то деталь. Расход топлива напрямую связан с условиями эксплуатации — в московских пробках об экономии можно и не мечтать. Мы закладываем 20 литров на 100 километров.
Собственный автопарк только начали формировать, марку и модель выбирали долго. Присматривались к среднетоннажникам Hyundai, Isuzu, европейским автомобилям. «Китайцев» в расчет сознательно не брали. Прислушались к рекомендациям одного нашего сотрудника, он родом с Дальнего Востока и хорошо знаком с подержанными праворульными Hino. Узнали, что теперь в России продаются новые машины Hino с левым рулем. Поэтому в ноябре 2010 года купили два Hino 300, то есть еще не нового поколения, а весной приобрели еще одну машину. Цена нас устроила, грузовиками довольны, хотя сразу же, зимой, пришлось купить два комплекта шин Michelin с более «зубастым» протектором, чем те, что стояли на автомобилях. Поломок автомобилей пока нет. На одной из машин были проблемы с холостым ходом, но обратились в сервис — там все наладили, заменили какую-то деталь. Расход топлива напрямую связан с условиями эксплуатации — в московских пробках об экономии можно и не мечтать. Мы закладываем 20 литров на 100 километров.
Кабина
Главное отличие новой кабины — она стала немного длиннее, увеличился наклон лобового стекла, изменились фары и решетка радиатора. Длиннее — за счет переноса вперед передней стойки двери и новой задней стенки с глубокой выштамповкой, позволяющей действительно очень далеко отодвинуть кресло водителя от руля. В ней легко размещается водитель ростом под два метра. Полностью изменен дверной проем — он стал выше и шире. Даже старую кабину «трехсотки» нельзя было назвать «угловатой», здесь же наклон стекла увеличился еще больше. При этом стойки сделали насколько можно тонкими, чтобы не ухудшать обзор. Понятно, что оценить совершенство аэродинамики можно только при работе грузовика на магистралях, через уменьшение расхода топлива, а не при стоянии в пробках. Блок-фары тоже стали выше, двухъярусные и более раскосые, чем прежние. К вопросу о первенстве в дизайне: китайцы уже давно применяют похожие фары на своих грузовиках, но светить лучше будут японские. Так же, как и у всех «японцев», у Hino 300, и у «старой», и у новой, есть две разные кабины: узкая и широкая. Внешняя ширина первой кабины 1695 мм, второй — 1995 миллиметров.
Длиннее — за счет переноса вперед передней стойки двери и новой задней стенки с глубокой выштамповкой, позволяющей действительно очень далеко отодвинуть кресло водителя от руля. В ней легко размещается водитель ростом под два метра. Полностью изменен дверной проем — он стал выше и шире. Даже старую кабину «трехсотки» нельзя было назвать «угловатой», здесь же наклон стекла увеличился еще больше. При этом стойки сделали насколько можно тонкими, чтобы не ухудшать обзор. Понятно, что оценить совершенство аэродинамики можно только при работе грузовика на магистралях, через уменьшение расхода топлива, а не при стоянии в пробках. Блок-фары тоже стали выше, двухъярусные и более раскосые, чем прежние. К вопросу о первенстве в дизайне: китайцы уже давно применяют похожие фары на своих грузовиках, но светить лучше будут японские. Так же, как и у всех «японцев», у Hino 300, и у «старой», и у новой, есть две разные кабины: узкая и широкая. Внешняя ширина первой кабины 1695 мм, второй — 1995 миллиметров. Напомним, что ширина «Волги» 1800 мм, а «ГАЗели» — 2000 миллиметров. С узкой кабиной познакомиться не удалось, ее устанавливают на шеститонные грузовики и автомобили еще меньшей грузоподъемности. Но в широкой кабине однозначно просторно даже втроем, настолько, насколько может быть просторно в развозном грузовике. В этом полностью заслуга планировки салона: рычаг переключения передач размещен не строго по центру кабины и под ногами ничего не мешается. Кроме того, рычаг КП складывается! Его надо чуть приподнять вверх, а затем «завалить» набок, рычаг стояночного тормоза тоже можно «сложить». Говорят, что это сделано для возможности ночевки в машине. Все правильно — в дальней поездке, когда в кабине нет спальной полки, а до гостиницы еще ехать и ехать, будешь рад и такой возможности. Но лучше работать на коротком плече, чтобы не мучиться и спать дома. Кстати, ООО «Хино Моторс Сэйлс» планирует начать поставки в Россию новых Hino 300 со сдвоенной кабиной. В ней поместится шесть человек, что, несомненно, удобно для различных коммунальных служб.
Напомним, что ширина «Волги» 1800 мм, а «ГАЗели» — 2000 миллиметров. С узкой кабиной познакомиться не удалось, ее устанавливают на шеститонные грузовики и автомобили еще меньшей грузоподъемности. Но в широкой кабине однозначно просторно даже втроем, настолько, насколько может быть просторно в развозном грузовике. В этом полностью заслуга планировки салона: рычаг переключения передач размещен не строго по центру кабины и под ногами ничего не мешается. Кроме того, рычаг КП складывается! Его надо чуть приподнять вверх, а затем «завалить» набок, рычаг стояночного тормоза тоже можно «сложить». Говорят, что это сделано для возможности ночевки в машине. Все правильно — в дальней поездке, когда в кабине нет спальной полки, а до гостиницы еще ехать и ехать, будешь рад и такой возможности. Но лучше работать на коротком плече, чтобы не мучиться и спать дома. Кстати, ООО «Хино Моторс Сэйлс» планирует начать поставки в Россию новых Hino 300 со сдвоенной кабиной. В ней поместится шесть человек, что, несомненно, удобно для различных коммунальных служб. Довольно интересна панель приборов — в нижней ее части отформована удобная полка для разных мелочей. А на потолке, над ветровым стеклом, есть два ящика для дорожной документации, вплоть до формата А4. Комбинация приборов тоже новая, она подросла в размерах, а «стрелочные» тахометр и спидометр дополнили дисплеем. На него выводится уровень топлива в баке, температура двигателя, пробег автомобиля, в том числе и суточный, мгновенный расход топлива. Если бы была установлена коробка-автомат, на дисплей выводились и режимы. Еще интересная особенность «приборки» — на шкале тахометра расположена контрольная лампочка работы двигателя в экономичном режиме. В рулевом колесе смонтирована подушка безопасности, как опция возможна установка эйрбэга для пассажиров. В дверях установлены брусья безопасности, в рулевой колонке есть деформируемые при ДТП элементы, и естественно — регулировка руля по углу наклона и высоте.
Довольно интересна панель приборов — в нижней ее части отформована удобная полка для разных мелочей. А на потолке, над ветровым стеклом, есть два ящика для дорожной документации, вплоть до формата А4. Комбинация приборов тоже новая, она подросла в размерах, а «стрелочные» тахометр и спидометр дополнили дисплеем. На него выводится уровень топлива в баке, температура двигателя, пробег автомобиля, в том числе и суточный, мгновенный расход топлива. Если бы была установлена коробка-автомат, на дисплей выводились и режимы. Еще интересная особенность «приборки» — на шкале тахометра расположена контрольная лампочка работы двигателя в экономичном режиме. В рулевом колесе смонтирована подушка безопасности, как опция возможна установка эйрбэга для пассажиров. В дверях установлены брусья безопасности, в рулевой колонке есть деформируемые при ДТП элементы, и естественно — регулировка руля по углу наклона и высоте.
Snap-on Pro-Link Ultra диагностическая система для двигателей Hino — Техническое обслуживание
Новое программное обеспечение Snap-on EEHD866025 Pro-Link Ultra Diagnostic System разработано специально для поддержки диагностики и калибровки двигателей Hino. Это программное обеспечение версии 1.0 поддерживает как обычные автомобили Hino серии 600 (с 2005 по 2016 год), так и автомобили Hino серии 300 (с 2012 по 2016 год).
Это программное обеспечение версии 1.0 поддерживает как обычные автомобили Hino серии 600 (с 2005 по 2016 год), так и автомобили Hino серии 300 (с 2012 по 2016 год).
Линия Pro-Link — это система диагностики для тяжелых условий эксплуатации, которая помогает техническим специалистам диагностировать автомобили большой грузоподъемности, позволяя техническим специалистам точно определить проблему и сэкономить драгоценное рабочее время.Эта система считывает активные неисправности; читает и очищает неактивные неисправности; и обеспечивает четкое представление данных двигателя.
«Это новое программное обеспечение Pro-Link предлагает техническим специалистам более 30 диагностических тестов и многочисленные калибровки для ряда двигателей Hino», — сказал Дэйв Шок, менеджер по продукции Snap-on. «Версия 1.0 — это трудолюбивое диагностическое программное обеспечение, которое предлагает так много новых преимуществ для наших заказчиков, работающих в тяжелых условиях».
Расширенные функции нового программного обеспечения EEHD866025 Pro-Link для двигателей Hino включают:
— Сброс дистанции технического обслуживания горелки — Нагреватель линии обратного слива
— Регенерация DPF (2008-2016) — Запорный клапан охлаждающей жидкости
— Привод системы рециркуляции ОГ — Дозирование DEF
— Активизация выхлопного тормоза — Реле нагревателя DEF
— Проверка утечки топлива — Проверка утечки DEF
— Активация свечи накаливания — обратный клапан насоса DEF
— Инжектор Вырез — Давление линии Нагреватель
— Привод дроссельной заслонки на впуске — Нагреватель линии всасывания
— Сброс памяти SCR — Реле выключения кондиционера
— Запрещение пуска / Только проворачивание — Свет замедлителя двигателя
— Целевая частота вращения — стоп-сигнал выхлопа
— Активация VNT — Тахометр
— Клапан давления воздуха распыления — Клапан воздуха горения
— Отверстие форсунки распылителя — Топливный насос
— Главный воздушный клапан распылителя — Катушка зажигания
Калибровки, предлагаемые в качестве дополнительных функций, включают:
— Программирование форсунок
— Текущая частота вращения вала отбора мощности (частота вращения вала отбора мощности на холостом ходу, регулировка увеличения приращения)
— Нагрузка сажи DPF
Изначально размещено на Trucking Info
JMSE | Бесплатный полнотекстовый | Моделирование и моделирование вязкой гидродинамической модели манипулятора с одной степенью свободы
1.
 Введение
ВведениеС быстрым развитием морской индустрии применение роботов, устанавливаемых на подводных аппаратах, становится все более распространенным. Подводные манипуляторы в основном используются для сбора и разведки и т.д. Их подводные характеристики можно определить по их скорости и точности. Подводные манипуляторы во время работы обычно подвергаются воздействию больших сил и моментов. Эти силы и моменты в основном включают гравитацию, инерционную гидродинамику и вязкую гидродинамику.Есть больше решений для определения силы тяжести и инерционной гидродинамики. Таким образом, вязкая гидродинамическая модель стала предметом исследования, требующим особого внимания из-за большого количества коэффициентов и сложности измерения.
Ссылки [1,2,3] подтвердили точность расчетов моделирования жидкости с использованием программного обеспечения, такого как FLUENT, путем сравнения смоделированных расчетных значений гидродинамики с измеренными значениями инженерных методов. В [4, 5, 6] изучались сопротивление и сила дополнительной массы манипулятора под водой и была получена инерционная гидродинамическая модель с помощью моделирования CFD (Computational Fluid Dynamics), но вязкая гидродинамика не рассматривалась в качестве ключевых целей в исследовании. В [7,8,9,10] численно рассчитаны коэффициенты вязкой гидродинамики моделей подводных лодок и кораблей сложной формы в заданных навигационных условиях и улучшены характеристики управляемости во время навигации. В [11] были определены вязкие кинетические коэффициенты манипулятора посредством аэродинамических экспериментов и проведены морские испытания.
В [7,8,9,10] численно рассчитаны коэффициенты вязкой гидродинамики моделей подводных лодок и кораблей сложной формы в заданных навигационных условиях и улучшены характеристики управляемости во время навигации. В [11] были определены вязкие кинетические коэффициенты манипулятора посредством аэродинамических экспериментов и проведены морские испытания. В настоящее время исследования вязкой гидродинамики в основном сосредоточены на конкретных моделях кораблей и подводных аппаратах, и в меньшей степени — на загруженных на них манипуляторах.Поэтому предлагается метод численного расчета коэффициента вязкой гидродинамики на основе манипуляторов с одинарной степенью свободы. Метод основан на ANSYS Fluent. UDF (определяемая пользователем функция) и динамическая сетка, которые используются для имитации вращательного движения манипулятора. Изменяются входные и выходные условия, а также граничные условия жидкостной области. Кроме того, вязкая гидродинамическая модель может быть получена путем подбора кривой и регрессионного анализа.
2.Математическая модель и теоретический анализ
2.1. Математическое моделирование гидродинамики вязкой жидкости
Так как поле окружающего ее потока изменяется во время работы подводного манипулятора; рука подвергается реакции водоема, вызванной силой, создаваемой водоемом. Гидродинамика движущегося манипулятора в воде состоит из двух частей: инерционной гидродинамики, вызванной ускорением, и вязкой гидродинамики, вызванной трением. Инерционная гидродинамика обычно определяется эмпирическими формулами, в то время как коэффициенты вязкой гидродинамики сложны и трудны для измерения.
В данной статье предполагается использование модели манипулятора с одной степенью свободы, установленной на фиксированном основании. Плечо представляет собой однородный легкий стержень с круглым поперечным сечением, диаметром 50 мм (d), длиной плеча (l) 500 мм, при соотношении длины к диаметру 10, принадлежащий тонкой штанге. Создание его системы координат показано на рисунке 1.
Когда манипулятор выполняет постоянное движение, влияние ускорения и углового ускорения на переменную движения может быть проигнорировано на основании предположения «медленного движения».Таким образом, простые соображения для вязкой гидродинамики — это эффекты скорости и угловой скорости в переменной движения. Его можно представить как: U = [u v w p q r] T, где u — скорость в направлении OX, v — скорость в направлении OY, w — скорость в направлении OZ, p — угловая скорость вращения вокруг оси OX, q — угловая скорость вращения вокруг оси OY, а r — угловая скорость вращения вокруг оси OZ.
Вязкую гидродинамику можно выразить как многомерную функцию F = f (u, v, w, p, q, r), а шестимерный компонент вязкой гидродинамики F = [X Y Z K M N] T также может быть отображенным в вышеуказанной функциональной форме, направление которой показано на рисунке 2. Вязкая гидродинамическая F выполняет расширение Тейлора в форме уравнения (1):f (U) = f (Uk) + (U − Uk) T∇f (Uk) +12! (U − Uk) TH (Uk) (U − Uk) + на
(1)
где Uk = [u0 v0 w0 p0 q0 r0] T, Uk — начальная постоянная.
H (Uk) = [∂2f (Uk) ∂u2∂2f (Uk) ∂u∂v ⋯ ∂2f (Uk) ∂u∂r∂2f (Uk) ∂u∂v∂2f (Uk) ∂v2 ⋯ ∂ 2f (Uk) ∂v∂r ⋮⋮ ⋱ ⋮ ∂2f (Uk) ∂u∂r∂2f (Uk) ∂v∂r ⋯ ∂2f (Uk) ∂r2]
Принимая во внимание симметрию влево-вправо и вперед-назад, а также предел движения манипулятора, несколько коэффициентов в разложениях второго порядка равны нулю, а остальные — немаловажными гидродинамическими коэффициентами, как в уравнении (2):{X = Xuuu2 + Xvvv2 + Xwww2 + Xrrr2 + XvrvrY = Yvv + Yrr + Yv | v | v | v | + Yr | r | r | r | + Yv | r | v | r | Z = Zww + Zw | w | w | w | + Zvvv2 + Zrrr2 + ZvrvrK = Kvv + Kv | v | v + Krr + Kr | r | r | r | M = Mww + Mw | w | w | w | + Mvvv2 + Mrrr2 + MvrvrN = Nvv + Nrr + Nv | v | v | v | + Nr | r | r | r | + Nv | r | v | r |
(2)
Вязкую гидродинамику манипулятора можно рассчитать в FLUENT.Регрессионный анализ рассчитанной вязкой гидродинамики и соответствующих скоростей может быть выполнен для получения неизвестных коэффициентов в уравнении (2) в MATLAB. Коэффициенты первой производной, связанные только с линейной скоростью (u, v, w), являются производными положения, а коэффициенты первой производной, относящиеся к угловой скорости (p, q, r), являются производными вращения. Коэффициенты, вызванные совместными изменениями двух или более параметров, являются производными связи.
Коэффициенты, вызванные совместными изменениями двух или более параметров, являются производными связи.
2.2. Уравнение управления
Для анализа гидродинамики подводных манипуляторов обычно предполагается, что жидкость изотермична и несжимаема, а также представляет собой постоянный поток, величина и направление которого не меняются со временем. Уравнение неразрывности (Уравнение (3)) и уравнение Навье – Стокса (Уравнение (4)) служат двумя основными уравнениями, необходимыми для решения проблемы течения вязкой жидкости. Эти уравнения обычно описываются в виде частных дифференциалов:∂u → ∂t + (u → ⋅∇) u → = f → −1ρ∇p + ν∇2u →
(4)
Форма выражения усредненного по времени уравнения неразрывности не меняется.Вместо этого тензор напряжения Рейнольдса добавляется к формуле после усреднения по времени уравнения N – S, что приводит к проблеме замыкания исходного уравнения. Напряжение Рейнольдса составляет около 10-2 Па, что свидетельствует о турбулентном потоке и не может быть напрямую проигнорировано. Следовательно, необходимо ввести правильную модель турбулентности, чтобы моделировать описание повышенного напряжения Рейнольдса.
Следовательно, необходимо ввести правильную модель турбулентности, чтобы моделировать описание повышенного напряжения Рейнольдса.
Для несжимаемой изотермической турбулентной водной среды основные уравнения турбулентности включают уравнения DNS (прямое численное моделирование), уравнения LES (моделирование крупных вихрей) и уравнения RANS (среднее по времени Renault).Два уравнения (уравнения DNS и уравнения LES) имеют ограниченное использование из-за требований большого количества вычислительных сеток. В настоящее время в большинстве инженерных расчетов используется уравнение RANS для решения замкнутых уравнений, образованных путем введения модели турбулентности, и, таким образом, для получения среднего по времени значения турбулентных элементов. Для решения вязкой гидродинамики в установившемся режиме соответствующая модель турбулентности является ключом к численному моделированию в этой статье.
3. Анализ метода расчета
3.1.
 Создание расчетной области
Создание расчетной областиВообще говоря, чем больше размер расчетной области, тем она ближе к реальным рабочим условиям. Обратной стороной является то, что это увеличит объем расчета и продлит период расчета. Если область расчета слишком мала, граничные условия и результаты расчетов трудно сопоставить с реальными рабочими условиями. Поэтому очень важно разумно выбрать размер расчетной области.
Основываясь на предыдущем опыте и множественных численных методах [6,12,13], в данной статье домен определяется как вычислительная, как показано на рисунке 3b.Конкретные размеры следующие:Передняя граница: 1,5 H
Задняя граница: 2 H
Боковая граница: 1,5 H
где H — сумма высоты плеча и основания.
Параметры движения для моделирования показаны на рисунке 3, α — угол поворота вокруг оси OZ, β — угол плеча к направлению потока, V — скорость потока на входе в область и линейная скорость. Компоненты манипулятора показаны в уравнении (5):{u = Vcosβcosαv = Vcosβsinαw = Vsinβ
(5)
3.
 2. Создание сетки
2. Создание сеткиДля расчета CFD требуются хорошо распределенные сетки. Обычно сетки делятся на структурированные и неструктурированные. Неструктурированная сетка означает, что внутренние точки в области сетки не имеют одинаковых смежных единиц, без регулярной топологии, не расположены по слоям, а распределение узлов сетки является произвольным. Поэтому он более гибкий, чем структурированная сетка. Неструктурированные сети можно оптимизировать, используя определенные критерии в процессе их создания.В конечном итоге они могут отображаться в виде высококачественных сеток, подходящих для сложной геометрии, легко контролируемых размеров сетки и плотности узлов. Более того, внедрение случайных структур данных способствует адаптации сетки. Структурированную сетку сложно смоделировать из-за формы манипулятора, вместо этого неструктурированную сетку легко комбинировать с технологией динамической сетки. Таким образом, в исследовании используется неструктурированная сетка.
Мы сравниваем базовую сетку с плотной сеткой для проверки независимости сетки. Базовая сетка в непосредственной близости от манипулятора показана на рисунке 4a, а плотная сетка — на рисунке 4b. Количество элементов и узлов показано в таблице 1.
Базовая сетка в непосредственной близости от манипулятора показана на рисунке 4a, а плотная сетка — на рисунке 4b. Количество элементов и узлов показано в таблице 1.Процесс вращения манипулятора реализован с помощью UDF и технологии динамической сетки в Fluent. Динамическое построение сетки выполняется с использованием модели сглаживания пружины, которая аппроксимирует соединительные линии между узлами сетки как пружины, а положение узлов после сглаживания получается путем вычисления уравнений равновесия сил между ними.В процессе расчета сетки с большой частотой аберраций или огромным изменением размера группируются вместе, чтобы повторно разделить частичные сетки.
3.3. Решение производных положения, производных вращения и производных связи
Решение неизвестных коэффициентов в уравнении (2) является ключом к исследовательской задаче, где Y v , N v , Z w и M w — производные по положению, Y r и N r — производные по вращению, а остальные неизвестные коэффициенты — связанные производные.
Позиционные производные могут быть получены путем моделирования испытания в низкоскоростной аэродинамической трубе, а вращательные производные получаются путем измерения вязкой гидродинамики модели при различных угловых скоростях вращения. Число связанных производных велико, и вязкая гидродинамика, подверженная вращательному манипулятору, измеряется, когда β не равно 0. После обширных экспериментов коэффициенты вязкой гидродинамики были получены с помощью регрессионного анализа методом наименьших квадратов.
Вход в расчетную область задается как граница скорости, выход — как условие свободного потока, а граница расчетной области — как нескользящая неподвижная стенка.
Согласно исследованию модели турбулентности в [13], стандартная k – ω модель имеет множество преимуществ, таких как хорошая численная стабильность, точное решение градиента давления, низкое влияние числа Рейнольдса, эффект сжимаемости и диффузия сдвигового потока. . Он имеет лучшую адаптируемость при расчете задачи обтекания пограничного слоя. Это одна из наиболее широко используемых моделей турбулентности для вязких гидродинамических решений. Поэтому в данной статье в качестве модели турбулентности используется стандартная k – ω-модель. Уравнение кинетической энергии k и турбулентной частоты ω показано в уравнении (6). Определенные параметры модели приведены в таблице 2 по ссылке [13]:{∂ρk∂t + ∇⋅ (ρU → k) = ∇⋅ [(μ + μtσk) ∇k] + Pk − β′ρkω∂ρω∂t + ∇⋅ (ρU → ω) = ∇⋅ [(μ + μtσω) ∇ω] + αtωkPk − βtρω2
(6)
4. Анализ результатов
Сравнивая вязкую гидродинамику манипулятора, измеренную с использованием базовой и плотной сетки соответственно, мы делаем вывод, что различия находятся в диапазоне от 1.От 7% до 4,3%. Различия достаточно низкие и незначительные.
Вычисления выполняются на 64-разрядном процессоре, состоящем из ЦП (Intel Core i5-8400 @ 2,80 ГГц) и 8 ГБ доступной памяти, и занимают 37 часов с как минимум 40 итерациями на временной шаг.
Используя размер расчетной области, установленный в разделе 3. 1, скорость потока расчетной области остается постоянной, угол β между манипулятором и направлением набегающего потока регулируется, рассчитывается вязкая гидродинамика под разными углами, а затем вязкая производная гидродинамического положения получается с помощью линейного анализа.Содержание расчета производной положения показано в Таблице 3. Поскольку разные степени α и β приводят к тому, что манипулятор имеет разные линейные скорости в направлениях OX, OY и OZ, вязкая гидродинамика рычага измеряется в горизонтальной плоскости XOZ и вертикальная плоскость XOY соответственно. Значения вертикальной силы Y и момента тангажа N, измеренные при различных линейных скоростях v в направлении OY, показаны в таблице 4. Производные Yv и Nv по положению являются коэффициентами первой производной линейной скорости v, поэтому наименьшие квадраты Подгонка кривой вертикальной силы Y и момента тангажа N в вязкой гидродинамике к линейной скорости v выполняется, как показано на рисунках 5 и 6.Значение производной в средних точках 0 линейной скорости v принимается в качестве производной положения.
1, скорость потока расчетной области остается постоянной, угол β между манипулятором и направлением набегающего потока регулируется, рассчитывается вязкая гидродинамика под разными углами, а затем вязкая производная гидродинамического положения получается с помощью линейного анализа.Содержание расчета производной положения показано в Таблице 3. Поскольку разные степени α и β приводят к тому, что манипулятор имеет разные линейные скорости в направлениях OX, OY и OZ, вязкая гидродинамика рычага измеряется в горизонтальной плоскости XOZ и вертикальная плоскость XOY соответственно. Значения вертикальной силы Y и момента тангажа N, измеренные при различных линейных скоростях v в направлении OY, показаны в таблице 4. Производные Yv и Nv по положению являются коэффициентами первой производной линейной скорости v, поэтому наименьшие квадраты Подгонка кривой вертикальной силы Y и момента тангажа N в вязкой гидродинамике к линейной скорости v выполняется, как показано на рисунках 5 и 6.Значение производной в средних точках 0 линейной скорости v принимается в качестве производной положения. Как и выше, значения боковой силы Z и момента рыскания M, измеренные при различной линейной скорости w в направлении OZ, показаны на Таблица 5 Производные положения Z w и M w являются коэффициентами первой производной линейной скорости w, поэтому аппроксимация кривой наименьших квадратов вязкой гидродинамической поперечной силы Z и момента рыскания M относительно линейной скорости w равна выполняется, как показано на рисунках 7 и 8.Производная средней линейной скорости w в точке 0 берется в качестве производной положения. Производные по положению могут быть получены, как показано в таблице 6 ниже: Поскольку манипулятор, изучаемый в этой статье, имеет одну степень свободы, измеряется только вязкая гидродинамика, когда он вращается вокруг оси OZ. UDF применяется для регулировки скорости вращения руки. Условия измерения производных вращения показаны в таблице 7. В данной статье рассчитывается гидродинамика вращающегося подводного манипулятора при стационарном течении.
Как и выше, значения боковой силы Z и момента рыскания M, измеренные при различной линейной скорости w в направлении OZ, показаны на Таблица 5 Производные положения Z w и M w являются коэффициентами первой производной линейной скорости w, поэтому аппроксимация кривой наименьших квадратов вязкой гидродинамической поперечной силы Z и момента рыскания M относительно линейной скорости w равна выполняется, как показано на рисунках 7 и 8.Производная средней линейной скорости w в точке 0 берется в качестве производной положения. Производные по положению могут быть получены, как показано в таблице 6 ниже: Поскольку манипулятор, изучаемый в этой статье, имеет одну степень свободы, измеряется только вязкая гидродинамика, когда он вращается вокруг оси OZ. UDF применяется для регулировки скорости вращения руки. Условия измерения производных вращения показаны в таблице 7. В данной статье рассчитывается гидродинамика вращающегося подводного манипулятора при стационарном течении. Рука вращается в плоскости XOY. Угловая скорость r регулируется в соответствии с таблицей 7, и измеряется мгновенная вязкая гидродинамика плеча во время вращения от -10 ° до 10 ° вокруг оси OZ. Измеренные вертикальная сила Y и момент тангажа N показаны в Таблице 8. Производные вращения Y r и N r представляют собой коэффициенты первой производной угловой скорости r, аналогично методу решения производных положения. Подгонка кривой наименьших квадратов вертикальной силы Y и момента тангажа N в вязкой гидродинамике к угловой скорости r выполняется, как показано на рисунках 9 и 10.Производная при средней угловой скорости r, равной 1,25 рад / с, принимается в качестве производной вращения. Производные вращения могут быть получены, как показано в таблице 9 ниже: Связанная производная — это вязкий гидродинамический коэффициент второго порядка руки при сложном движении. условия. Посредством нестационарного итеративного расчета движения манипулятора при различных углах α и β и различных угловых скоростях измеряется вязкая гидродинамика каждого состояния движения, и многие производные связи получаются с помощью регрессионного анализа методом наименьших квадратов.
Рука вращается в плоскости XOY. Угловая скорость r регулируется в соответствии с таблицей 7, и измеряется мгновенная вязкая гидродинамика плеча во время вращения от -10 ° до 10 ° вокруг оси OZ. Измеренные вертикальная сила Y и момент тангажа N показаны в Таблице 8. Производные вращения Y r и N r представляют собой коэффициенты первой производной угловой скорости r, аналогично методу решения производных положения. Подгонка кривой наименьших квадратов вертикальной силы Y и момента тангажа N в вязкой гидродинамике к угловой скорости r выполняется, как показано на рисунках 9 и 10.Производная при средней угловой скорости r, равной 1,25 рад / с, принимается в качестве производной вращения. Производные вращения могут быть получены, как показано в таблице 9 ниже: Связанная производная — это вязкий гидродинамический коэффициент второго порядка руки при сложном движении. условия. Посредством нестационарного итеративного расчета движения манипулятора при различных углах α и β и различных угловых скоростях измеряется вязкая гидродинамика каждого состояния движения, и многие производные связи получаются с помощью регрессионного анализа методом наименьших квадратов. Условия решения производной связи показаны в таблице 10 ниже. Связанные производные получены с помощью регрессионного анализа, а полученные связанные производные обрабатываются без определения размеров. Значения параметров приведены в Таблице 11.
Условия решения производной связи показаны в таблице 10 ниже. Связанные производные получены с помощью регрессионного анализа, а полученные связанные производные обрабатываются без определения размеров. Значения параметров приведены в Таблице 11.5. Выводы
Гидродинамика подводных манипуляторов во время работы сложна и трудно предсказуема. Анализируется, что компоненты гидродинамики включают инерционную гидродинамику, вызванную ускорением, и вязкую гидродинамику, вызванную трением.В данной статье целью исследования является вязкая гидродинамика.
Согласно исследованиям динамики AUV (автономного подводного аппарата), ROV (дистанционно управляемое транспортное средство) и кораблей в других источниках, вязкая гидродинамическая модель манипулятора анализируется в форме расширения Тейлора и измеряется вязкая гидродинамика. с использованием манипулятора с одной степенью свободы для моделирования подводного движения, а вязкие гидродинамические коэффициенты модели рассчитываются с помощью регрессионного анализа. Получена точная вязкостная гидродинамическая модель для прогнозирования вязкой гидродинамики манипуляторов при работе в любом положении.
Получена точная вязкостная гидродинамическая модель для прогнозирования вязкой гидродинамики манипуляторов при работе в любом положении.
Эта модель является основой для управления с прогнозированием и полезна для изучения устойчивости управления подводными манипуляторами. Мы полагаем, что, хотя моделирование в этой статье было выполнено для манипуляторов с одной степенью свободы, метод моделирования может быть расширен для манипуляторов с несколькими степенями свободы и более сложных форм, как в случае реальных подводных манипуляторов.
Вклад авторов
M.Z. Осуществлял авторский надзор и финансовую поддержку проекта. X.L. провел формальный анализ, разработал все эксперименты и впоследствии составил рукопись. Ю.Т. придумал оригинальные идеи, обеспечил руководство проектом и рассмотрел написанное.
Финансирование
Это исследование было поддержано Национальной программой ключевых исследований и разработок Китая (грант № 2018YFB1309401) и Исследовательским проектом в области науки и технологий в области высшего образования провинции Хэбэй (грант №QN2018090).
Конфликт интересов
Авторы заявляют об отсутствии конфликта интересов.
Ссылки
- Stern, F .; Agdrup, K .; Kim, S.Y .; Hochbaum, A.C .; Rhee, K.P .; Quadvlieg, F .; Perdon, P .; Хино, Т .; Broglia, R .; Горски Дж. Опыт SIMMAN 2008 — Первый семинар по проверке и валидации методов моделирования маневрирования судов. J. Ship Res. 2011 , 55, 135–147. [Google Scholar]
- Ларссон, Л. Численная гидродинамика кораблей; Спрингер: Дордрехт, Нидерланды, 2013.[Google Scholar]
- Irwin, R.P .; Шове, К. Количественная оценка гидродинамических коэффициентов сложных структур; IEEE: Нью-Йорк, Нью-Йорк, США, 2007 г .; С. 1341–1345. [Google Scholar]
- Mclain, T.W .; Рок, С. Разработка и экспериментальная проверка гидродинамической модели подводного манипулятора. Int. J. Робот. Res. 1998 , 17, 748–759. [Google Scholar] [CrossRef]
- Колодзейчик В. Предварительное исследование гидродинамической нагрузки на подводный робот-манипулятор. J. Autom. Моб. Робот. Intell. Syst. 2015 , 9, 11–17. [Google Scholar] [CrossRef]
- Arabshahi, A .; Беддху, М .; Briley, W.R .; Chen, J.P .; Gaither, A .; Gaither, K .; Janus, J.M .; Jiang, M .; Marcum, D .; Макгинли, Дж. Перспектива моделирования морских гидродинамических потоков. В материалах симпозиума по морской гидродинамике, Вашингтон, округ Колумбия, США, 9–14 августа 1998 г.[Google Scholar]
- Ohmori, T .; Fujino, M .; Мията, Х. Исследование поля обтекания полных форм корабля при маневрировании. J. Mar. Sci. Technol. 1998 , 3, 22–29. [Google Scholar] [CrossRef]
- Уэно, М. Гидродинамические производные и характеристика движения подводного надводного корабля в безграничной воде.Ocean Eng. 2010 , 37, 879–890. [Google Scholar] [CrossRef]
- Филаретов В.Ф .; Коноплин, А.Дж .; Гетман, А. Экспериментальное определение коэффициентов вязкого трения для расчета силовых воздействий на подвижные звенья подводных манипуляторов. Мехатроника Автомат. Upr. 2015 , 16, 738–743. [Google Scholar] [CrossRef]
- Колодзейчик В. Метод определения переходных гидродинамических коэффициентов для подводного манипулятора с одной глубиной резкости.Ocean Eng. 2018 , 153, 122–131. [Google Scholar] [CrossRef]
- Zhiqiang, H.U .; Ruiwen, Y.I .; Lin, Y .
 ; Haitao, G.U .; Ван Ч. Численные методы расчета гидродинамики беспилотных подводных аппаратов на основе неподвижных систем координат. Подбородок. Sci. Бык. 2013 , 58, 55. [Google Scholar]
; Haitao, G.U .; Ван Ч. Численные методы расчета гидродинамики беспилотных подводных аппаратов на основе неподвижных систем координат. Подбородок. Sci. Бык. 2013 , 58, 55. [Google Scholar]
 «> Pazmiño, R.S .; Cena, C.E.G .; Arocha, C.A .; Сантоха, Р.А. Опыт и результаты проектирования и разработки подводного параллельного робота с 6 степенями свободы.Робот. Auton. Syst. 2011 , 59, 101–112. [Google Scholar] [CrossRef]
«> Pazmiño, R.S .; Cena, C.E.G .; Arocha, C.A .; Сантоха, Р.А. Опыт и результаты проектирования и разработки подводного параллельного робота с 6 степенями свободы.Робот. Auton. Syst. 2011 , 59, 101–112. [Google Scholar] [CrossRef] ; Haitao, G.U .; Ван Ч. Численные методы расчета гидродинамики беспилотных подводных аппаратов на основе неподвижных систем координат. Подбородок. Sci. Бык. 2013 , 58, 55. [Google Scholar]
; Haitao, G.U .; Ван Ч. Численные методы расчета гидродинамики беспилотных подводных аппаратов на основе неподвижных систем координат. Подбородок. Sci. Бык. 2013 , 58, 55. [Google Scholar]Рисунок 1. Модель манипулятора и система координат.
Рисунок 1. Модель манипулятора и система координат.
Рисунок 2. Шестимерная составляющая вязкой гидродинамики F.
Рисунок 2. Шестимерная составляющая вязкой гидродинамики F.
Рисунок 3. Принципиальная схема расчетной области и α / β.
Рисунок 3. Принципиальная схема расчетной области и α / β.
Рисунок 4. Сетка секции манипулятора.
Рисунок 4. Сетка секции манипулятора.
Рисунок 5. Построенная кривая вертикальной силы Y и линейной скорости v.
Рисунок 5. Построенная кривая вертикальной силы Y и линейной скорости v.
Рисунок 6. Построенная кривая момента тангажа N и линейной скорости v.
Построенная кривая момента тангажа N и линейной скорости v.
Рисунок 6. Построенная кривая момента тангажа N и линейной скорости v.
Рисунок 7. Построенная кривая поперечной силы Z и линейной скорости w.
Рисунок 7. Построенная кривая поперечной силы Z и линейной скорости w.
Рисунок 8. Построенная кривая момента рыскания M и линейной скорости w.
Рисунок 8. Построенная кривая момента рыскания M и линейной скорости w.
Рисунок 9. Построенная кривая вертикальной силы Y и угловой скорости r.
Рисунок 9. Построенная кривая вертикальной силы Y и угловой скорости r.
Рисунок 10. Построенная кривая момента тангажа N и угловой скорости r.
Рисунок 10. Построенная кривая момента тангажа N и угловой скорости r.
Таблица 1. Параметры базовой и плотной сетки.
Таблица 1. Параметры базовой и плотной сетки.
Параметры базовой и плотной сетки.
| Максимальное количество слоев | Скорость роста | Элементы | Узлы | |
|---|---|---|---|---|
| Базовая сетка | 5 | 1,2 | 8 | 114351 | 1.2 | 1,429,231 | 401,609 |
Таблица 2. Стандартные параметры модели k – ω.
Таблица 2. Стандартные параметры k – ω модели.
| σk | σω | αt | βt | β ′ | ||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||
|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|
| 2,0 | 2,0 | 5/9 | 0,075 | 0,075 | 0,09 Таблица 3. Таблица 3. Решение случаев производных позиций.
Таблица 4. Измерения вертикальной силы Y и момента тангажа N при различной линейной скорости v. Таблица 4. Измерения вертикальной силы Y и момента тангажа N при различных линейных скоростях v.
Таблица 5. Измерение поперечной силы Z и момента рыскания M при различной линейной скорости w. Таблица 5. Измерение поперечной силы Z и момента рыскания M при различной линейной скорости w.
Таблица 6. Позиционные производные манипулятора в вязкой гидродинамике. Таблица 6. Позиционные производные манипулятора в вязкой гидродинамике.
Таблица 8. Таблица 8. Измерения вертикальной силы Y и момента тангажа N при различных угловых скоростях r.
Таблица 9. Производные вращения манипулятора в вязкой гидродинамике. Таблица 9. Производные вращения манипулятора в вязкой гидродинамике. Таблица 10. Решение случаев сопряжения производных. Таблица 10. Решение случаев сопряжения производных.
Таблица 11. Таблица 11. Связующие производные манипулятора в вязкой гидродинамике.
© 2019 Авторы. Лицензиат MDPI, Базель, Швейцария. Эта статья представляет собой статью в открытом доступе, распространяемую в соответствии с условиями лицензии Creative Commons Attribution (CC BY) (http://creativecommons.org/licenses/by/4.0/). Манипуляции с микробиотами хозяина и паразитов: стратегии выживания при хронической нематодной инфекцииДизайн исследования Целью исследования было выяснить, является ли T.muris , кишечная нематода, содержала кишечную микробиоту и, если да, то для ее характеристики. Кроме того, исследование было направлено на оценку функциональной важности кишечной микробиоты паразита и ее связи с кишечником хозяина, в котором обитал паразит. Все работы с животными были разработаны в консультации со статистиками Манчестерского университета для использования минимально возможных животных в экспериментальных группах для достижения значимых результатов.Когда у нас были оценки дисперсии на основе предыдущих данных, мы выполнили расчет мощности, чтобы вычислить минимальное необходимое количество животных. Если у нас не было оценок дисперсии, мы использовали подход степеней свободы для оценки размера выборки. На основе ранее опубликованных данных для инфекций с низкой дозой Trichuris с ошибкой 1-го типа, зафиксированной на уровне 5%, с мощностью 80%, с использованием двустороннего теста со стандартным отклонением 5 и величиной эффекта 9, размер выборки должен составлять пять животных на группу. Исследование было завершено подтверждением достаточного количества наборов данных, которые ответили на наши первоначальные гипотезы с достаточной надежностью, чтобы представлять интерес для научного сообщества с точки зрения новизны и важности. Бактериальные штаммы, среды и условия роста. E. coli (PK1162) ( 5 ) с GFP, кодируемым на хромосоме, обычно выращивали в течение ночи в бульоне Лурия-Бертани (LB) [1% триптона, 0,5% дрожжевого экстракта и 1% NaCl (масс. Уход за паразитами. Исходные инфекции T. muris поддерживались в восприимчивых линиях мышей, а взрослых червей собирали на 42 день p.i. Взрослых червей инкубировали в течение 4 часов или в течение ночи и собирали яйца. Яйцам давали возможность зародыша в течение по крайней мере 6 недель в дистиллированной воде, и инфекционность была установлена по содержанию червей в восприимчивой линии мышей. Мышей инфицировали от 150 до 300 яиц с зародышем, и на 14 день или 21 день устанавливали бремя гельминтов.я. Экскреторный / секреторный (E / S) антиген T. muris получали следующим образом. Взрослых червей культивировали в RPMI 1640 с добавлением 10% эмбриональной телячьей сыворотки (об. / Об.), 2 мМ l-глутамина, пенициллина (100 Ед / мл) и стрептомицина (100 мкг / мл; все Invitrogen) и E / S. антиген собирали через 4 часа инкубации. Животные и отбор проб. Самцов мышей C57BL / 6, AKR (оба Envigo), а также самцов или самок мышей SCID и Rag2 KO (оба доморощенные) содержали в Манчестерском университете в индивидуально вентилируемых клетках группами по пять человек с диагностической проколкой ушей для идентификации людей. Для каждого эксперимента мыши были из одной партии для контроля межпартийных различий в кишечной микробиоте мышей. Мышей содержали в помещении на 2 недели перед экспериментом, чтобы стабилизировать сообщества к новым условиям, и содержали при температуре 22 ° ± 1 ° C и влажности 65% с 12-часовым циклом свет-темнота и имели свободный доступ к пище и воде.Все процедуры на животных выполнялись в соответствии с положениями Закона о научных процедурах Министерства внутренних дел (1986), лицензия на проект 70/8127 и подлежали рассмотрению Органом по защите животных и этике Манчестерского университета. Мышей инфицировали в возрасте от 6 до 8 недель через желудочный зонд штаммом T. muris E. Была дана высокая доза заражения с использованием ~ 200 яиц или низкая доза с использованием ~ 20 яиц, по сравнению с неинфицированным наивным контролем.Содержимое слепой кишки собирали у всех мышей, и отдельных червей, собранных у инфицированных особей, промывали RPMI 1640 (Invitrogen) с добавлением пенициллина (100 Ед / мл) и стрептомицина (100 мкг / мл; Sigma). Все образцы хранили при -80 ° C до экстракции ДНК. Для лечения мебендазолом назначали дозу 50 мг / кг. Эффективность антигельминтного лечения была подтверждена отрицательным подсчетом фекальных яиц примерно через 7 дней после лечения, а также наличием глистов в конце эксперимента. мышей GF C57BL / 6 содержали в Манчестерском гнотобиотическом учреждении (MGF) при Манчестерском университете.Высокую дозу (~ 500) инфекционных яиц T. Для подсчета личинок L2 и L4 после заражения мышей отбирали на 14 день или 21 день.я. Слепую кишку вырезали и надрезали в продольном направлении, а эпителий соскребали щипцами. Затем можно было индивидуально подсчитать червей. Для подсчета взрослых червей слепую кишку снова вырезали и разрезали в продольном направлении, но взрослых червей отделяли от эпителия по отдельности. Перенос наивной и хронической микробиоты или Bt животным GF. Для получения наивной или хронической микробиоты для переноса отбирали наивных или хронически инфицированных (день 50 p. Иммуноферментный анализ на антиген, специфичный для паразитов. Анализ паразитарно-специфической продукции IgG2a / c проводили с помощью иммуноферментного иммуноферментного анализа. Вкратце, планшеты Immulon IV (Dynatech) покрывали T. muris E / S антигеном (5 мкг / мл) в карбонатно-бикарбонатном буфере (pH 9,6) в течение ночи при 4 ° C. После блокирования [3% бычьего сывороточного альбумина в PBS и 0,05% Tween (мас. Вылупление in vitro яиц T. muris . Яйца T. muris были выведены для получения стерильных личинок L1 с использованием 32% гипохлорита натрия в стерильной воде в течение 2 часов при 37 ° C и 5% CO. 2 . Яйца промывали RPMI 1640 (Invitrogen) и инкубировали при 37 ° C с 5% CO 2 в течение 4-5 дней до вылупления. Для вылупления содержимого слепой кишки мышей заражали ~ 20 яйцами и оставляли до 35 дней.я. Контрольные мыши остались незараженными. Кишки промывали 3 мл стерильного PBS и центрифугировали (16000 г ) в течение 10 с. Супернатант удаляли и 200 мкл добавляли к 800 мкл RPMI 1640 (Invitrogen) с ~ 130 яиц T. muris в 24-луночных культуральных планшетах (шесть лунок на мышь) в анаэробной камере при 37 ° C. Выделение ДНК. Поверхность T. muris стерилизовали с использованием 3% гипохлорита натрия в течение 10 мин и промывали стерильной водой пять раз. Заключительную промывку использовали для ПЦР-анализа, чтобы гарантировать адекватное удаление внешних бактерий. Для экстракции ДНК T. muris и содержимого слепой кишки протокол, подробно описанный Griffiths et al. ( 31 ). Денатурирующий градиентный гель-электрофорез.Анализ денатурирующим градиентным гель-электрофорезом бактериальных сообществ, присутствующих в содержимом слепой кишки и взрослых червей T. muris , выполняли, как подробно описано ( 8 ). Профилирование сообщества. 454 Пиросеквенирование было выполнено на 16 ампликонах гена рРНК S из содержимого слепой кишки и взрослых особей T. Флуоресцентная гибридизация in situ. Взрослые особи T. muris фиксировали в 4% параформальдегиде (PFA) (мас. / Об.) В течение 24 часов, дегидратировали в градиенте этанола, очищали в масле кедровой древесины и заключали в парафин. Срезы были подготовлены, регидратированы с использованием градиента этанола и депарафинизированы в Citroclear. Срезы зондировали универсальным бактериальным геном 16 S рРНК Cy3 с двойной меткой EUB338 (Cy3-5′-GCTGCCTCCCGTAGGAGT-3′-Cy3; Sigma-Aldrich).Гибридизацию проводили с использованием зонда (100 пмоль / мл) в буфере для зонда [30% формамид (об. T. muris и совместное культивирование бактерий. Живых взрослых особей T. muris собирали от мышей AKR, инфицированных высокой дозой, добавляли к ночной культуре бактерий E. coli PK1162 в течение ночи и инкубировали в течение ночи при 37 ° C с 5% CO 2 . Анализ антибиотиков in vitro. Живые взрослые особи T. muris были выделены из мышей AKR, инфицированных высокой дозой, и промыты в среде RPMI 1640 с добавлением пенициллина (100 Ед / мл) и стрептомицина (100 мкг / мл; все Invitrogen).Стерильные личинки L1 получали, как подробно описано выше (в разделе «Вылупление in vitro яиц T. muris »). T. muris инкубировали в RPMI 1640 с антибиотиками или без них (девять взрослых червей на обработку или ~ 50 личинок L1 на обработку с тремя биологическими повторами для каждой). Используемые антибиотики и их конечные концентрации были следующими: метронидазол (1 мг / мл), ампициллин (1 мг / мл), ванкомицин (0,5 мг / мл) и неомицин (1 мг / мл). Количественная полимеразная цепная реакция. Численность бактерий определяли методом кПЦР с использованием системы Applied Biosystems StepOnePlus Real-Time PCR System с SYBR Green Fast PCR Master Mix (Life Technologies) в герметичных 96-луночных планшетах с использованием универсальных праймеров 16 S рРНК: 1369F (5′- CGGTGAATACGTTCYCGG-3 ′) И 1492R (5′-GGWTACCTTGTTACGACTT-3 ′) (Sigma-Aldrich) ( 35 ). Для стандартов количественной ПЦР ДНК экстрагировали из E.coli PK1162, и ПЦР выполняли с использованием универсальных праймеров для всего гена 16 S рРНК: 27F (5′-AGAGTTTGATCCTGGCTCAG-3 ‘) и 1492R (5′-GGTTACCTTGTTACGACTT-3’) (Sigma-Aldrich) ( 36 ). Последующие продукты ПЦР очищали с помощью набора для очистки MinElute PCR Purification Kit (Qiagen) и количественно оценивали с помощью Qubit (Invitrogen), и рассчитывали количество копий [(концентрация матрицы (нг / мкл) × 10 -9 ) / 650 дальтон] × 6.022 × 10 23 (постоянная Авогадро)].Были выполнены серийные разведения, и для стандартной кривой использовалось от 10 2 до 10 7 копий, при этом эффективность праймера составляла ~ 97%. T. muris ДНК разводили для стандартизации количественной ПЦР и проводили контрольную ПЦР с праймерами 27F и 1492R, чтобы гарантировать, что ДНК имеет достаточное качество. Каждая реакция содержала 10 мкл SYBR Green Master Mix, прямой и обратный праймеры с концентрацией 200 нМ каждый и 2 мкл матричной ДНК в конечном объеме 20 мкл.Условиями реакции ПЦР были начальная денатурация при 90 ° C в течение 20 с, затем 40 циклов при 95 ° C в течение 15 секунд и 60 ° C в течение 30 секунд. Анализ кривой плавления выполняли путем измерения флуоресценции при повышении температуры с 60 до 95 ° C для определения специфичности амплификации после последнего цикла. Каждый образец анализировали в трех экземплярах, и для каждой возрастной группы использовали пять разных взрослых особей T. muris . Результаты выражали как общее число копий генов рРНК 16 S бактерий на образец путем умножения на общую концентрацию ДНК в каждом образце. Статистический анализ. Многовариантный анализ и анализ разнообразия микробных сообществ проводился с использованием пакетов Vegan ( 37 ) и ecodist ( 38 ) в R. NMDS использовался для оценки сообществ с использованием различий Брея-Кертиса для характеристики различий между сообществами. Цифры NMDS были нанесены в произвольном двумерном пространстве с осью, показывающей евклидово расстояние между образцами с центром в нуле. Напряжение указывает на качество соответствия несходств Брея-Кертиса двумерным евклидовым графикам (<0.2 подходит). Все остальные стандартные статистические методы были выполнены в R. Графики были выполнены с использованием SigmaPlot (Systat Software Inc.). Существенные различия ( P <0,05) между количеством червей экспериментальной группы определяли с использованием теста Манна-Уитни U , а для данных микробиома с несколькими группами использовали несколько тестов Краскела-Уоллиса с коррекцией FDR и апостериорным тестом Данна. Существенные различия ( P <0,05) между экспериментальными группами по другим параметрам определяли с помощью дисперсионного анализа. Оценка взаимодействий между процессом тяжелой ковки и вспомогательным манипулятором, сочетающая моделирование методом конечных элементов и анализ кинематикиLv C, Zhang LW, Mu ZJ, Tai QG, Zheng QY (2008) 3D-моделирование многоступенчатой ковки с помощью МКЭ процесс лопатки компрессора газовой турбины. J Mater Process Tech 198: 463–470 Статья Google ученый Wilson WRD, Schmid SR, Liu JY (2004) Расширенное моделирование горячей штамповки: модель теплопередачи для использования с методом конечных элементов.J Mater Process Tech 155–156: 1912–1917 Статья Google ученый Kong TF, Chan LC, Lee TC (2004) Прогнозирование формы заготовки для осесимметричной горячей штамповки с использованием вариационного анализа. Key Eng Mat 274–276: 733–738 Артикул Google ученый Kong TF, Chan LC, Lee TC (2005) Численное определение форм заготовок для горячего формования неосесимметричных компонентов.J Mater Process Tech 167: 472–479 Статья Google ученый Kong TF, Chan LC, Lee TC (2008) Численное и экспериментальное исследование конструкции преформ при неосесимметричной горячей штамповке. Int J Adv Manuf Technol 37: 908–919 Статья Google ученый Оу Х, Армстронг К.Г. (2006) Оценка влияния упругости пресса и штампа при ковке профильных профилей с использованием моделирования методом конечных элементов.Finite Elem Anal Des 42: 856–867 Статья Google ученый Хино Р., Сасаки А., Йошида Ф, Торопов В. В. (2008) Новый алгоритм сокращения количества этапов штамповки в процессе ковки с использованием численной оптимизации и моделирования КЭ. Int J of Mech Sci 50 (5): 1089–1104 Google ученый Ма Q, Lin ZQ, Yu ZQ (2009) Прогнозирование деформационного поведения и эволюции микроструктуры при тяжелой штамповке с помощью МКЭ.Int J Adv Manuf Technol 40: 253–260 Статья Google ученый Lee MC, Chung SH, Joun MS (2009) Автоматическое и точное моделирование многоступенчатых автоматических процессов холодной штамповки путем комбинированного анализа двух- и трехмерных подходов. Int J Adv Manuf Technol 41: 1–7 Статья Google ученый Хартли П., Пиллинджер И. (2006) Численное моделирование процесса ковки.Comput Methods Appl Mech Engrg 195: 6676–6690 MATH Статья Google ученый Бхаттачарья С., Хатвал Х, Гош А. (1997) Схема оценки параметров в режиме онлайн для обобщенных параллельных манипуляторов типа платформы Стюарта. Mech & Mach Theor 32 (1): 79–89 MATH Статья Google ученый Лу И, Ху Б. (2007) Анализ кинематики и решение активных / ограниченных сил параллельного манипулятора 3SPU + UPR.Mech & Mach Theor 42: 1298–1313 MATH Статья Google ученый Shi ZX, Fung HK, Li YC (1999) Динамическое моделирование жестко-гибкого манипулятора для управления задачами ограниченного движения. Математическая модель приложения 23: 509–525 MATH Статья Google ученый Ван С.К., Хикита Х., Кубо Х., Чжао Ю.С., Хуанг З., Ифукубе Т. (2003) Кинематика и динамика полностью параллельного манипулятора с шестью степенями свободы и эластичными суставами.Mech & Mach Theor 38: 439–461 MATH Статья Google ученый Парих П.Дж., Лам С.С. (2009) Решение задачи прямой кинематики в параллельных манипуляторах с использованием стратегии итеративной искусственной нейронной сети. Int J Adv Manuf Technol 40: 595–606 Статья Google ученый Лилли К.В., Меллигери А.С. (1996) Динамическое моделирование и контроль соответствия нейронной сети интеллектуального кузнечного центра.J Intell Rob Syst Theor Appl 17: 81–99 Статья Google ученый Лю В.С., Най Т.Дж. (2004) Адаптивное управление интеллектуальной открытой штамповкой. Международный конгресс и выставка машиностроения ASME, IMECE 2004, Анахайм, Калифорния, США, 759–766 Высококачественный колесный болт для Hino Gh Front M22 * 1,5 * 88 ммMY, маточный манипулятор чашечного типа для хирургии гистерэктомии, TH, 4D кавитационный вакуумный RF инфракрасный лазерный липо-лазерный аппарат для похудения, 1920 * 1080 HD, водонепроницаемый, Нанкинский двухшнековый экструдер для пластика Haisi Производитель экструзии пластика, зум-объектив.Кольцевой или параллельный гофрированный гибкий металлический шланг из нержавеющей стали с оплеткой. 4G-маршрутизатор WiFi, Примечание: Предлагается высокопроизводительная линия для производства проволочной прокатки / прокатный стан! 1, IE с переключением на китайский и английский языки, программное обеспечение для управления несколькими окнами CMS, оборудование для автоматического поиска, конструкция перил из высококачественного стекла из нержавеющей стали, кронштейн для перил с круглой трубкой, удобный интерфейс программного обеспечения, простое управление 2, CMOS-датчик высокой четкости 2 миллиона пикселей 3, подключи и работай, многофункциональный чистый белый автоматический умный интеллектуальный безбаковый туалет, удобный и быстрый 4, стандартный H.264+, пластинчатый осветлитель для очистки сточных вод от ферментации Флотация растворенного воздуха Daf, надувная детская прогулка для плавания с замком безопасности детей (1920 * 1080), 25-50 В, 200-1350 мА, 40 Вт светодиодный драйвер (OB40-xxxxYYYY-Uzz-F) (704 * 480) необязательно 5, встроенный IR-CUT, автоматическое переключение фильтров, изображения не будут иметь цветовой оттенок, дневной и ночной эффект лучше, 10 20-дюймовый корпус фильтра из нержавеющей стали с гофрированным картриджем 5 микрон с гофрированной мембраной из полипропилена, управление микропроцессором слабой кислоты и щелочи Вытяжной шкаф, Android, Windows, BlackBerry и другие смартфоны, видеонаблюдение на рынке, так что вы можете смотреть на него в любое время и в любом месте, Мебельные аксессуары Кухонная экструзионная рама Кабинет Алюминиевые дверные профили голосовой домофон, простой диалог 8,14.4 Вт SMD5050 Водонепроницаемая светодиодная лента 60 светодиодов / м / Гибкая светодиодная лента RGB, автоматический разнонаправленный круиз 9, может реализовать сигнализацию фото и видео хранения сигналов, 200L Mini Brewery System Small Beer Brewery Equipment, Long Staple Cotton Check Yarn Dyed Bedding Home Sweet Home, внешний вход и выход сигнала тревоги, Пресс для пальмового масла Фрезерный экстрактор Машина для обработки пальмового масла Малайзия, E- оповещение по электронной почте, загрузка видео по FTP, шприцевой насос, медицинский инъекционный насос с двух- / одноканальным оборудованием. 11. Регулировка яркости, контрастности, насыщенности, цветности, тройное цифровое увеличение. Особенности: Двустороннее аудио Нажмите кнопку на вашем смартфоне, вы можете легко достичь двусторонней внутренней связи, Холодильные детали R22 Maneurop Compressor Danfoss Compressor Mt160hw4d.Вакуумный роликовый массаж Pan / Tilt / RF Vela Shape Кавитация для похудения, тканая ткань из полиэстера и спандекса с точечной печатью для женщин Платье (кастрюля) Специальное обслуживание для порошковой металлургии с диапазоном вращения турбо-вилки (наклона) 5-кратный оптический зум 5-кратный оптический зум, который означает, что независимо от увеличения или уменьшения изображения, изображение всегда будет четким и резким, оно позволит вам приблизиться и четче к цели, вы не пропустите ни одного движения. Совместимая клипса GE Critikon Dinamap Plus для взрослых пальцев Датчик SpO2 с 6-контактной детской футболкой для девочек с принтом Compushield-Flower и кружевной оборкой от китайского производителя, горный электрический велосипед для любой местности с водо- и пыленепроницаемым ЖК-дисплеем.Через приложение может быть ключ, чтобы открыть или закрыть функцию обнаружения. Женский водонепроницаемый фитнес-браслет с сердечным ритмом IP68, спортивный смарт-браслет B11, Tsudakoma 9100 Air Jet Looms, год 2008, 190 см, 761A, положительная камера, 20-дюймовый электрический велосипед с толстыми шинами, электрический велосипед со встроенной батареей. Модуль жидкокристаллического экрана 160 * 132 с белой светодиодной подсветкой для обеспечения четкого качества изображения при видеонаблюдении. What’Solid Surface Stone Table Top Ресторан Черные круглые обеденные столы
Манипулятор и система медицинских устройствВ данной заявке испрашивается выгода по заявке Японии № 2007-282144, поданной 30 октября 2007 г .; содержание которого включено посредством этой ссылки. 1. Область изобретения Настоящее изобретение относится к устройству-манипулятору и системе медицинского устройства и, в частности, к устройству-манипулятору, имеющему множество суставов, эффективно приводимых в действие способом, зависящим от целевого лечения и медицинского система устройств, в которую входит аппарат-манипулятор. 2. Описание предшествующего уровня техники В последние годы широкое распространение получила эндоскопическая хирургия для выполнения различных процедур внутри полости тела. Эндоскопическая операция выполняется путем открытия отверстия для введения в стенке тела и введения эндоскопа и лечебных инструментов чрескожно в полость тела через отверстие для введения. Этот тип техники не требует обширного рассечения и широко применяется как малоинвазивный метод холецистэктомии или резекции части легкого.Для улучшения работоспособности в этом типе хирургии был предложен медицинский манипулятор типа «ведущий-ведомый». Публикация выложенной заявки на патент Японии №№ H9-66056, например, раскрывает систему медицинского манипулятора для использования в хирургии, в которой используется множество аппаратов медицинских манипуляторов и которая может быстро устранять неисправность в случае возникновения какой-либо неисправности в одно или несколько устройств-манипуляторов. Система манипулятора обеспечивает высокую степень безопасности и работоспособности, а также позволяет сократить время работы и уровень инвазивности для пациента. При управлении многосуставными манипуляторами используются вычисления обратной кинематики, чтобы найти целевые значения для ориентации и положения дистального конца манипулятора. Другими словами, когда предоставляется план траектории, обратные кинематические вычисления используются для расчета траекторий углов сочленения для каждого сочленения. Когда при вычислении траекторий угла шарнира количество приводимых шарниров велико, общая погрешность вождения увеличивается из-за сложения ошибок в каждом шарнире. Для решения этой проблемы в выложенной публикации японской патентной заявки №h4-12709 раскрывает способ, который использует нечеткий вывод для вычисления траекторий углов сочленения, которые позволяют достичь целевых значений с минимальным количеством ведомых сочленений. В одном из типов эндоскопической хирургии, даже менее инвазивной, чем обычная эндоскопическая хирургия, лечение выполняется с использованием медицинского инструмента, установленного на дистальном конце эндоскопа. Однако лечебный инструмент, который проходит через канал щипцов эндоскопа и выступает из дистального конца, имеет плохую работоспособность, и поэтому методы, в которых используется миниатюрный манипулятор для увеличения числа степеней свободы и возможностей лечебного инструмента, были считается.Хотя такому миниатюрному манипулятору, который выступает из дистального конца, сложно иметь сложную конструкцию из-за ограничений по размеру, требуются высокие уровни точности и эффективности. Однако с помощью этого типа миниатюрного манипулятора трудно достичь как высокой точности, так и высокой эффективности. Также желательна система медицинского устройства, в которой используются один или несколько высокоточных и высокоэффективных миниатюрных манипуляторов, выступающих из дистального конца. Целью настоящего изобретения является создание устройства-манипулятора, имеющего множество суставов, которые приводятся в движение с высокой точностью и высокой эффективностью, и системы медицинского устройства, оснащенной устройством-манипулятором. Для достижения цели устройство манипулятора по настоящему изобретению включает в себя манипулятор, имеющий множество суставов, блок хранения параметров для хранения параметров сустава, включая наибольшую доступную силу, каждого сустава из множества суставов; блок ввода траектории для ввода в качестве плана траектории траекторий для перемещения дальнего конца манипулятора из текущего положения и положения в целевое положение и положение; и часть установки траектории для установки траектории угла сочленения для каждого сочленения, обеспечивающей наибольшую доступную силу из траекторий угла сочленения, которые позволяют перемещаться в целевое положение и ориентацию с минимальным количеством ведомых сочленений на основе наибольшего доступного параметра силы для каждого сустав, хранящийся в части для хранения параметров, и план траектории.Кроме того, система медицинского устройства по настоящему изобретению включает в себя устройство-манипулятор. РИС. 1 представляет собой схематический вид, поясняющий общий вид системы медицинского устройства; РИС. 2 — внешний вид, показывающий внешний вид системы медицинского устройства; РИС. 3А — схема, поясняющая совместные функции манипулятора; РИС. 3B — схема, поясняющая совместные функции манипулятора; РИС. 4 — внешний вид манипулятора в перспективе; РИС.5 — вид манипулятора в разрезе; РИС. 6 — вид в разрезе для объяснения работы манипулятора; РИС. 7 — блок-схема системы медицинского устройства; РИС. 8 — блок-схема, поясняющая последовательность операций устройства-манипулятора; РИС. 9 — изображение, полученное с эндоскопа, показывающее лечение с использованием манипулятора; и ФИГ. 10 показан пример заданных траекторий углов сочленения. Ниже описаны варианты осуществления изобретения со ссылкой на прилагаемые чертежи. <Обзор системы медицинских устройств> РИС. 1 представляет собой схематический вид, поясняющий общий вид системы 2 медицинского устройства в соответствии с вариантом осуществления изобретения. На фиг. 1, экран дисплея устройства отображения , 60, , который является частью дисплея, отображает изображение 61 съемки внутри живого тела 10 , снятое с помощью CCD 51 , которая является частью захвата изображения, эндоскопа 50 , который описан в следующем разделе.Полученное изображение 61 включает в себя манипуляторы , 100, и 200, , каждый из которых имеет два сустава, для лечения пораженного участка 11 внутри живого тела 10 . Кронштейн для руки предусмотрен на участке 101 дистального конца манипулятора 100 , а рычаг с ножом предусмотрен на участке 201 дистального конца манипулятора 200 . Оператор управляет левым и правым устройством «ведущий-ведомый» 42 A и 42 B, используя левую и правую руки 12 и 13 .Устройства «ведущий-ведомый» 42 A и 42 B являются частью ввода траектории 42 для ввода траекторий для перемещения частей дистального конца 101 и 201 манипуляторов 100 и 200 к цели позиция и отношение с текущей позиции и отношения. Устройство управления манипулятором , 48, приводит в движение манипуляторы , 100, и , 200, на основе информации о траектории, введенной блоком ввода траектории , 42, . Обратите внимание, что система медицинского устройства 2 , показанная на фиг. 1 имеет конфигурацию, которая в основном такая же, как конфигурация настоящего варианта осуществления, независимо от того, имеет ли устройство-манипулятор два манипулятора, устройство-манипулятор имеет один манипулятор или три или более манипуляторов. Отметим также, что система 2 медицинского устройства включает в себя части 43 A и 43 B выбора степеней свободы для выбора степеней свободы манипуляторов и ограничения невыбранных степеней свободы.Хотя манипулятор по настоящему варианту осуществления включает в себя множество суставов и имеет большое количество степеней свободы, в системе медицинского устройства 2 манипулятор с меньшим количеством степеней свободы может обеспечить лучшую работоспособность, а также более безопасную и надежную обработку для некоторые виды лечения. Оператор может ограничить количество степеней свободы манипуляторов , 100, и , 200, в соответствии с лечением, используя части выбора степени свободы 43 A и 43 B.Операции участка 43, выбора степени свободы описаны в следующем разделе. Обратите внимание, что хотя фиг. 1 показывает расположение типа главный-подчиненный в качестве участка ввода траектории , 42, , изобретение не ограничивается такой конфигурацией, и другой известный тип узла ввода, который позволяет вводить желаемые траектории, например, с клавиатуры, сенсорного пера или можно использовать джойстик. РИС. 2 представляет собой внешний вид, показывающий внешний вид системы 2 медицинского устройства в соответствии с настоящим вариантом осуществления.На фиг. 2, два манипулятора 100 и 200 выступают из отверстий для щипцов 57 и 58 дистального конца 56 эндоскопа 55 . ПЗС 51 , которая является частью захвата изображения, и освещающая часть 52 B, которая является освещающей частью, предусмотрены в дистальной оконечной части 56 . Далее, так же, как на фиг. 1, рука предусмотрена на участке , 101, дистального конца манипулятора , 100, , а рукоятка с ножом предусмотрена на участке 201 дальнего конца другого манипулятора 200 . Манипулятор согласно настоящему варианту осуществления представляет собой миниатюрный манипулятор для проецирования из дистальной концевой части эндоскопа и имеет диаметр приблизительно от 2 мм до 5 мм, и он чрезвычайно компактен. Следовательно, манипулятор отличается от большинства известных манипуляторов, что затрудняет выполнение целевого лечения, если манипулятор не приводится в действие эффективно. <Структура манипулятора> Ниже описывается структура манипулятора настоящего варианта осуществления со ссылкой на фиг.3 — фиг. 6. Фиг. 3A и фиг. 3В — чертежи, поясняющие функции шарниров манипулятора , 200, . ИНЖИР. 4 — внешний вид в перспективе манипулятора 200 . ИНЖИР. 5 представляет собой вид в разрезе манипулятора 200 . ИНЖИР. 6 представляет собой вид в разрезе для пояснения операций манипулятора , 200, . РИС. 3А показаны шарниры манипулятора 200 . Манипулятор , 200, включает в себя, начиная с проксимальной концевой части манипулятора 210 (координаты: x0, y0, z0), приводной шарнир прямолинейного движения 211 (координаты: x1, y1, z1) и шарнир привода крена 212 (координаты: x2, y2, z2) шарнир привода рыскания 213 (координаты: x3, y3, z3), шарнир привода наклона 214 (координаты: x4, y4, z4), рыскание ведущий шарнир 215 (координаты: x5, y5, z5) и ведущий шарнир 216 (координаты: x6, y6, z6), которые являются шарнирами с вращательным приводом.Рычаг ножа предусмотрен на участке 201 дистального конца манипулятора 200 . РИС. 3В показан манипулятор 200 суставов в рабочем состоянии. Здесь шарнир , 213, , ведущий по рысканью, имеет изгиб -3θ, а шарнир , 215, , ведущий по рысканью, имеет изгиб 5θ. Манипулятор , 200, может перемещать часть дистального конца 201 из текущего положения и положения в целевое положение и положение путем регулирования углов сочленения множества суставов.Следует отметить, что манипулятор , 200, имеет большее количество степеней свободы, чем требуется для достижения целевого положения и ориентации. Другими словами, поскольку манипулятор , 200, имеет большее количество степеней свободы, чем требуется для работы, существует множество траекторий угла сочленения для перемещения к целевому положению и ориентации. Кроме того, точность и эффективность устройства-манипулятора 1, различаются в зависимости от того, какие траектории углов сочленения выбираются. Ниже приводится подробное описание конструкции манипулятора , 200, со ссылкой на фиг. 4 и фиг. 5. Как показано на виде в перспективе на фиг. 4 манипулятор 200 имеет пять соединительных секций с 251 по 255 , соединенных четырьмя шарнирами с 216 по 219 . Каждое соединение фиксируется заклепками , 260, в двух местах и допускает вращение в одном направлении. Таким образом, манипулятор 200 имеет два приводных шарнира 216 и 214 и два шарнира поворота 215 и 213 .Каждое соединение фиксируется в двух диагональных точках концами пары угловых проволок 270 . Соединительные секции с 251 по 255 могут быть согнуты в соответствующих соединениях посредством операций с угловыми проволоками , 270, , используя приводную часть 23 (не показана). Манипулятор , 200, имеет ножевой рычаг на его дистальной концевой части 201 , и положение и положение ножевого рычага изменяются посредством приведения в действие манипулятора , 200, . РИС. 5 — вид в разрезе манипулятора 200 , показанного на фиг. 4. Внутри центральной части манипулятора 200 рабочий провод 272 ножевого рычага предусмотрен внутри гибкой трубки 271 , которая является изолятором. Рабочий провод 272 позволяет передавать высокочастотные электрические токи и электрически соединен с ножевым рычагом. РИС. На фиг.6 показано состояние, в котором ножевой рычаг находится в манипуляторе 200 .В этом состоянии угловые тросы (не показаны) тянут шарнир , 216, ведущего шага, создавая изгиб на участке 251 изгиба на участке самого дальнего конца манипулятора 200 . Манипулятор 1 использует угловые тросы для привода манипулятора 200 и, следовательно, может иметь простую, надежную и миниатюрную конструкцию. <Конфигурация системы медицинского устройства> Ниже описывается конфигурация системы 2 медицинского устройства настоящего варианта осуществления со ссылкой на фиг.7. Фиг. 7 — это блок-схема, показывающая конфигурацию системы 2 медицинского устройства настоящего варианта осуществления. Для простоты ниже описывается система 2 медицинского устройства, имеющая единственный манипулятор 200 . Однако базовая конфигурация остается такой же, когда система 2 медицинского устройства имеет множество устройств-манипуляторов 1, . Единственное отличие состоит в том, что в случае системы 2 медицинского устройства, имеющей множество устройств-манипуляторов 1 , включение компонентов для каждого устройства-манипулятора. РИС. Фиг.7 показывает конфигурацию системы 2 медицинского устройства с манипулятором (не показан), имеющим приводную часть 20 для приведения в действие манипулятора внутри живого тела 10 . Манипулятор включает в себя датчик нагрузки 21 , датчик положения 22 и приводную часть 23 . Датчик нагрузки 21 предназначен для обнаружения нагрузок, возникающих на каждом из сочленений, когда сочленения манипулятора приводятся в движение для выполнения желаемой операции.Нагрузка выражается в виде крутящего момента (Н / м), когда шарнир вращающегося привода нагружен, и как сила (Н), когда шарнир привода прямого движения нагружен. Один из способов определения нагрузки при протягивании проволоки — это измерение натяжения проволоки. Другая возможность — определить нагрузку тензодатчиком и т.п. Кроме того, когда провод приводится в движение с помощью двигателя, нагрузку можно определить по потребляемой двигателем мощности. Обратите внимание, что новый датчик не обязательно должен быть включен в манипулятор.Компоненты, уже присутствующие в манипуляторе, в некоторых случаях могут использоваться для вывода информации о нагрузке в блок 40 определения нагрузки. Датчик положения 22 представляет собой датчик для определения положения и ориентации каждого из сочленений с использованием магнитного датчика или подобного. Обратите внимание, что, как и датчик нагрузки 21 , датчик положения 22 не обязательно должен включать датчик в манипулятор. Вместо этого возможно обнаруживать изменение положения и ориентации каждого сочленения, вызванное приводной частью , 23, , с использованием кодировщика, и выводить полученную информацию о положении в модуль 41 вычисления положения. Узел установки траектории 45 устанавливает траекторию угла сочленения каждого сочленения на основе информации из модуля вычисления положения 41 , модуля ввода траектории 42 и модуля выбора степени свободы 43 и т. Д. объединить параметры, введенные из блока ввода параметров 44 и сохраненные в блоке хранения параметров , 46, . Блок управления приводом 47, приводит в движение приводную часть 23 шарниров манипулятора в соответствии с траекториями угла шарнира, установленными блоком установки траектории 45 . Эндоскопическое устройство 50 включает в себя часть захвата изображения 51 , которая представляет собой ПЗС-матрицу и т.п., предусмотренную на дальнем конце части вставки (не показана), освещающую часть 52 для освещения частей внутри живого тела 10 , часть 53 управления захватом изображения для выполнения обработки и т.п. изображений, снятых частью 51 захвата изображения, и часть 54 управления эндоскопом для управления всем эндоскопом. Устройство отображения , 60, отображает изображение, полученное эндоскопическим устройством , 50, , и может также использоваться в качестве сенсорной панели для ввода траекторий манипулятора и т.п. Отметим, что датчик нагрузки , 21, , блок определения нагрузки , 40, , датчик положения , 22, и блок вычисления положения, , 41, не обязательно должны быть предусмотрены для всех из множества соединений. В частности, шарнир , 211, привода прямолинейного движения и шарнир , 212 привода качения могут приводиться в движение вручную. <Операции устройства-манипулятора> Ниже описываются операции устройства-манипулятора 1 со ссылкой на блок-схему на фиг. 8. Фиг. 8 — это блок-схема, поясняющая последовательность операций устройства-манипулятора 1 . (этап S 11 ) Устройство-манипулятор 1 принимает ввод параметров сустава для каждого сустава с использованием блока ввода параметров 44 и сохраняет введенные параметры в блоке хранения параметров 46 .Отметим, что, если параметры соединения были введены заранее, нет необходимости вводить параметры каждый раз, когда используется устройство-манипулятор. Параметры шарниров — это части информации о шарнирах, необходимые для управления шарнирами манипулятора. В системе медицинского устройства 2 параметры сустава могут включать в себя параметры DH (начальные координаты, длину, направление и т.п.), диапазоны совместных движений (диапазон углов, диапазон прямолинейного движения и т.п.) и точность совместной работы ( скорость отклика и тому подобное).Параметры сустава в системе 2 медицинского устройства дополнительно включают в себя наибольший доступный параметр силы суставов и параметр допустимой нагрузки для суставов. Наибольшая доступная сила данного шарнира — это максимальная сила, которая может быть создана этим шарниром, и для шарниров с вращательным приводом может быть выражена в единицах крутящего момента (Н / м) или электрической мощности приводного двигателя (Вт). Допустимая нагрузка на данное соединение — это максимальная нагрузка, которая может быть приложена к этому соединению.Если к какому-либо соединению приложена нагрузка, превышающая допустимую, существует риск повреждения шарнира или приводных проводов. Для шарниров с вращательным приводом допустимая нагрузка снова выражается в единицах крутящего момента или значения электрической мощности приводного двигателя. Отметим, что скорость обработки блоком ввода траектории , 42, , начиная с этапа S , 12, и далее, может быть увеличена путем размещения параметров соединения, сохраненных в блоке хранения параметров , 46, , в порядке доступной силы или допустимой нагрузки. (этап S 12 ) План траектории для перемещения дальнего конца манипулятора из текущего положения и ориентации в целевое положение и ориентацию вводится с использованием участка ввода траектории 42 . (этап S 13 ) Информация для ограничения количества степеней свободы манипулятора вводится блоком выбора степени свободы 43 . Манипулятор согласно настоящему варианту осуществления имеет шесть степеней свободы и, следовательно, может свободно позиционироваться в любом положении в трехмерном пространстве. РИС. 9 представляет собой изображение 61 , полученное с эндоскопа, и показывает лечение, при котором скальпель на участке дистального конца 201 манипулятора 200 рассекает больной участок 11 . В этом случае часть дистального конца 201 предпочтительно перемещается справа налево по прямой 11 B, как показано стрелкой A, в положение части дистального конца 201 B. Однако, иногда происходит ненужное движение в направлениях тангажа и крена, даже если оператор был очень осторожен при работе с устройством ведущий-ведомый (участок ввода траектории 42 ). Однако в случае устройства-манипулятора 1 количество степеней свободы в направлениях тангажа и крена может быть ограничено при выполнении вышеописанной обработки с использованием участка 43 выбора степени свободы. Когда дистальный конец представляет собой рычаг скальпеля, степень свободы направления вращения обычно не требуется. Информация об ограничении степени свободы из блока 43, выбора степени свободы используется для отмены входных сигналов ограниченного направления в блок 45 установки траектории, который описывается в следующем разделе.Здесь, если направления движения выражаются с использованием векторов, «отменить» входную часть, чтобы удалить компонент вектора в ограниченном направлении. Ограничивая количество степеней свободы с помощью участка выбора степени свободы 43 , устройство-манипулятор 1 может выполнять более безопасную и надежную обработку. (Этап S 14 ) Часть 45 установки траектории устанавливает траектории углов сочленения каждого сочленения на основе параметров сочленения и плана траектории.Узел установки траектории 45 устанавливает траектории угла сочленения, обеспечивающие наибольшую доступную силу среди траекторий угла сочленения, которые позволяют перемещаться в целевое положение и положение с минимальным количеством ведомых сочленений, на основе самых больших доступных параметров силы для сохраненных сочленений. в части хранения параметров 46 . Обратите внимание, что установка траекторий угла сочленения для обеспечения наибольших имеющихся сил не обязательно означает установку траекторий угла сочленения путем выбора сочленений, которые генерируют наибольшие силы, а означает установку таких траекторий угла сочленения, чтобы генерировать наибольшие силы, отдавая приоритет суставы, способные создавать большую силу при выборе суставов. Таким образом, в устройстве-манипуляторе 1 настоящего варианта осуществления, когда траектории углов сочленения задаются с использованием вычислений обратной кинематики, количество сочленений сводится к минимуму для обеспечения приоритетности точности работы. Устройство-манипулятор 1, настоящего варианта осуществления затем выбирает в качестве второстепенного приоритета траектории углов сочленения, которые обеспечивают наибольшую доступную силу. РИС. 10 показывает пример траекторий угла сочленения, заданных узлом 45 установки траектории.ИНЖИР. 10 показана траектория угла соединения двух шарниров с вращательным приводом. В миниатюрном аппарате-манипуляторе для медицинского применения точность является наиболее важной. Однако из-за своего небольшого размера манипулятор может создавать лишь небольшие силы и не всегда способен выполнять желаемое лечение. Поскольку часть 45, установки траектории устанавливает траекторию угла сочленения в соответствии с вышеописанными стандартами, устройство-манипулятор 1 настоящего варианта осуществления может выполнять более безопасную и надежную обработку. (Этап S 15 ) Блок управления приводом 47 начинает приводить в движение приводную часть 23 каждого сочленения в соответствии с траекториями угла сочленения, установленными участком установки траектории 45 . (этап S 16 ) Когда начинается приведение в движение ведущей части 23 шарниров, нагрузка создается в каждом суставе. При использовании устройства-манипулятора 1 системы медицинского устройства 2 трудно предсказать нагрузки на каждый сустав перед началом лечения, поскольку физические свойства обрабатываемой ткани, такие как твердость, эластичность и т.п. , зависят от места лечения и варьируются от человека к человеку. Следовательно, когда приводная часть 23 начинает движение, часть 40 определения нагрузки вычисляет нагрузку на каждое соединение на основе информации от датчика нагрузки 21 . Узел установки траектории 45 затем сравнивает нагрузку на каждое соединение с допустимым параметром нагрузки для каждого соединения, сохраненным в участке хранения параметров 46 , и, когда нагрузка на каждое соединение меньше допустимой нагрузки, приводная часть 23 продолжает приводить в движение дальний конец манипулятора до достижения целевого положения и положения. Когда, с другой стороны, нагрузка на любое из сочленений равна или превышает допустимую нагрузку, блок 45 установки траектории выполняет следующую обработку для установки новых траекторий углов сочленения. (этап S 17 ) Когда есть соединения, которые в настоящее время не приводятся в движение, для которых параметр допустимой нагрузки больше, чем параметр допустимой нагрузки для соединений, используемых в настоящее время (Да), часть установки траектории 45 переходит к этапу S 18 и меняет шарниры в привод.Затем пересчитываются траектории углов сочленения. Когда нет соединений, которые в настоящее время не приводятся в движение, для которых параметр допустимой нагрузки больше, чем параметр допустимой нагрузки для соединений, используемых в настоящее время (Нет), блок 45 установки траектории выполняет обработку, начиная с этапа S 19 и далее. (этап S 19 ) В случае, когда не все шарниры приводятся в движение (Да), часть установки траектории 45 переходит к этапу S 20 и увеличивает количество приводимых шарниров Автор: 1.Узел установки траектории 45 затем повторно вычисляет траектории углов сочленения. (Этап S 21 ) На этапе S 19 , когда все суставы приводятся в движение (Нет), часть 45 установки траектории не может переместить часть дистального конца манипулятора в целевое положение и ориентацию. вдоль введенных траекторий, и поэтому использует блок предупреждения , 70, , чтобы выдать предупреждение для информирования оператора. Для предупреждения можно использовать известный метод, такой как звук, вибрация или визуальное отображение на устройстве отображения , 60, . Получив предупреждение, оператор может продолжить лечение, введя новый набор новых траекторий. (Шаги S 22 и S 23 ) В устройстве манипулятора 1 блок управления приводом 47 приводит в движение приводную часть 23 каждого сустава в соответствии с траекториями угла сустава, установленными участок установки траектории 45 до тех пор, пока участок дистального конца манипулятора не переместится в целевое положение и положение.Устройство-манипулятор 1, затем продолжает работать до тех пор, пока на этапе S 23 не будет получен сигнал, указывающий на окончание лечения. Устройство-манипулятор 1 настоящего варианта осуществления имеет высокую точность, поскольку приводится в действие только минимальное количество шарниров. Кроме того, устройство-манипулятор 1, создает большую силу, несмотря на миниатюрный размер манипулятора. Таким образом, манипулятор может управляться точно и эффективно. Система 2, медицинского устройства, включающая в себя устройство-манипулятор 1, настоящего варианта осуществления, может, таким образом, управлять лечебным инструментом точно, эффективно и надежно. Описав предпочтительные варианты осуществления изобретения со ссылкой на прилагаемые чертежи, следует понимать, что настоящее изобретение не ограничивается этими точными вариантами осуществления, и различные изменения и модификации его могут быть выполнены специалистом в данной области без отклонения от сущность или объем изобретения, как определено в прилагаемой формуле изобретения. |
 Решение случаев производных позиций.
Решение случаев производных позиций. 0104
0104 0860
0860 Измерения вертикальной силы Y и момента тангажа N при различных угловых скоростях r.
Измерения вертикальной силы Y и момента тангажа N при различных угловых скоростях r. 5
5 Связующие производные манипулятора в вязкой гидродинамике.
Связующие производные манипулятора в вязкой гидродинамике. 0512
0512 9184
9184 Наконец, исследование было направлено на определение того, как микробиота паразита и хозяина способствовала общей экосистеме кишечника во время хронической гельминтной инфекции.
Наконец, исследование было направлено на определение того, как микробиота паразита и хозяина способствовала общей экосистеме кишечника во время хронической гельминтной инфекции. Совместное размещение мышей использовалось там, где это было возможно, чтобы избежать проблем конвергенции микробиоты ( 30 ), и это дополнительно поясняется в подписях к рисункам.Статистический анализ варьировался в зависимости от конкретного проведенного эксперимента. Например, для сравнения непрерывных переменных из независимых групп мы использовали тест Стьюдента t (для двух групп) и однофакторный дисперсионный анализ ANOVA (для более чем двух групп) с последующими апостериорными тестами Стьюдента t для всех парных сравнений. Поправка Бонферрони для множественного тестирования. Для некоторых подходов ослепление и случайное распределение животных по экспериментальным группам были невозможны (например, использование животных GF и их колонизация определенной микробиотой).Однако в этих случаях вслепую анализировали образцы, полученные из различных экспериментальных групп.
Совместное размещение мышей использовалось там, где это было возможно, чтобы избежать проблем конвергенции микробиоты ( 30 ), и это дополнительно поясняется в подписях к рисункам.Статистический анализ варьировался в зависимости от конкретного проведенного эксперимента. Например, для сравнения непрерывных переменных из независимых групп мы использовали тест Стьюдента t (для двух групп) и однофакторный дисперсионный анализ ANOVA (для более чем двух групп) с последующими апостериорными тестами Стьюдента t для всех парных сравнений. Поправка Бонферрони для множественного тестирования. Для некоторых подходов ослепление и случайное распределение животных по экспериментальным группам были невозможны (например, использование животных GF и их колонизация определенной микробиотой).Однако в этих случаях вслепую анализировали образцы, полученные из различных экспериментальных групп. v)] при 37 ° C и встряхивании при 200 об / мин. Bt штамм VPI-5482 выращивали в среде TYG (триптон, дрожжи, глюкоза), как описано ( 21 ).
v)] при 37 ° C и встряхивании при 200 об / мин. Bt штамм VPI-5482 выращивали в среде TYG (триптон, дрожжи, глюкоза), как описано ( 21 ). Антиген E / S осаждали для удаления яиц, концентрировали с использованием Centriprep YM-10 (Amicon), а затем диализовали против фосфатно-солевого буфера (PBS). Концентрацию белка определяли с помощью NanoDrop (ND-1000, Labtech).
Антиген E / S осаждали для удаления яиц, концентрировали с использованием Centriprep YM-10 (Amicon), а затем диализовали против фосфатно-солевого буфера (PBS). Концентрацию белка определяли с помощью NanoDrop (ND-1000, Labtech). Эксперименты соответствуют руководящим принципам «Исследования на животных: отчетность об экспериментах in vivo».
Эксперименты соответствуют руководящим принципам «Исследования на животных: отчетность об экспериментах in vivo». muris отбеливали 40% (мас. / Об.) Гипохлоритом натрия в течение 5 минут с последующими тремя промываниями в RPMI 1640 (Invitrogen) и использовали для инфекций. Были приготовлены высокие дозы стерильных личинок L1, как подробно описано ниже (в разделе «Вылупление in vitro из яиц T. muris »), и использовались для инфекций. Стерильность подтверждали ростом в бульоне LB в течение ночи и анализом ПЦР.
muris отбеливали 40% (мас. / Об.) Гипохлоритом натрия в течение 5 минут с последующими тремя промываниями в RPMI 1640 (Invitrogen) и использовали для инфекций. Были приготовлены высокие дозы стерильных личинок L1, как подробно описано ниже (в разделе «Вылупление in vitro из яиц T. muris »), и использовались для инфекций. Стерильность подтверждали ростом в бульоне LB в течение ночи и анализом ПЦР. i.) мышей и вырезали слепые кишки.Работая быстро, чтобы ограничить воздействие кислорода, содержимое слепой кишки выжимали в эппендорф и разбавляли 1:10 стерильным 50% глицерином / PBS (об. / Об.). Образцы подвергали кратковременной пульсации для осаждения крупных твердых частиц, а супернатант добавляли и замораживали при -80 ° C. Для проведения через желудочный зонд образцы размораживали на льду, разбавляли 1: 5 в стандартной среде TYG ( 21 ), а затем 200 мкл, содержащие 10 8 колониеобразующих единиц, вводили через желудочный зонд отдельным мышам, как описано ( 21 ).
i.) мышей и вырезали слепые кишки.Работая быстро, чтобы ограничить воздействие кислорода, содержимое слепой кишки выжимали в эппендорф и разбавляли 1:10 стерильным 50% глицерином / PBS (об. / Об.). Образцы подвергали кратковременной пульсации для осаждения крупных твердых частиц, а супернатант добавляли и замораживали при -80 ° C. Для проведения через желудочный зонд образцы размораживали на льду, разбавляли 1: 5 в стандартной среде TYG ( 21 ), а затем 200 мкл, содержащие 10 8 колониеобразующих единиц, вводили через желудочный зонд отдельным мышам, как описано ( 21 ). / Об.)] В планшеты добавляли восемь серийных 2-кратных разведений сыворотки (из начального 20-кратного разведения).Специфические к паразитам антитела выявляли с использованием биотинилированного крысиного антимышиного IgG2a / c (BD Pharmingen).
/ Об.)] В планшеты добавляли восемь серийных 2-кратных разведений сыворотки (из начального 20-кратного разведения).Специфические к паразитам антитела выявляли с использованием биотинилированного крысиного антимышиного IgG2a / c (BD Pharmingen). Через 24 часа в каждую лунку добавляли ~ 130 яиц T. muris . Культуры инкубировали анаэробно в течение 2,75 часа при 37 ° C, а затем подсчитывали количество вылупившихся и невылупившихся яиц.Затем в анализе использовали среднюю скорость вылупления на мышь.
Через 24 часа в каждую лунку добавляли ~ 130 яиц T. muris . Культуры инкубировали анаэробно в течение 2,75 часа при 37 ° C, а затем подсчитывали количество вылупившихся и невылупившихся яиц.Затем в анализе использовали среднюю скорость вылупления на мышь. muris , как подробно описано ( 8 ), что дало в среднем 19 544 последовательности на образец со средним охватом 99,8% всех видов с использованием товаров оценка ( 32 ).Считывания были ратифицированы для наименьшего размера выборки последовательностей из 7795 последовательностей. Последовательности депонированы в European Nucleotide Archive под номером доступа PRJEB12611.
muris , как подробно описано ( 8 ), что дало в среднем 19 544 последовательности на образец со средним охватом 99,8% всех видов с использованием товаров оценка ( 32 ).Считывания были ратифицированы для наименьшего размера выборки последовательностей из 7795 последовательностей. Последовательности депонированы в European Nucleotide Archive под номером доступа PRJEB12611. / Об.), 0,9 М NaCl, 20 мМ трис / HCl (pH 7,4) и 0,1% SDS (мас. / Об.)] и инкубировали во влажной камере при 46 ° C в течение 2 часов. Срезы промывали в буфере для гибридизации при 48 ° C [0,9 M NaCl, 20 мМ трис / HCl (pH 7,4) и 0,1% SDS] и обрабатывали 0,1% Sudan Black B (мас. / Об.) (Sigma-Aldrich) в течение 15 мин. После промывания PBS срезы закрепляли с помощью Mowiol (Sigma-Aldrich) и исследовали с помощью вертикального микроскопа Olympus BX51 с использованием объективов 60x или 100x.Изображения были получены с помощью камеры CoolSNAP ES (Photometrics) через программное обеспечение MetaVue (Molecular Devices). Специальный полосовой фильтр для Cy3 использовался вместе со световым полем. Затем изображения были обработаны и проанализированы с помощью ImageJ ( 33 ).
/ Об.), 0,9 М NaCl, 20 мМ трис / HCl (pH 7,4) и 0,1% SDS (мас. / Об.)] и инкубировали во влажной камере при 46 ° C в течение 2 часов. Срезы промывали в буфере для гибридизации при 48 ° C [0,9 M NaCl, 20 мМ трис / HCl (pH 7,4) и 0,1% SDS] и обрабатывали 0,1% Sudan Black B (мас. / Об.) (Sigma-Aldrich) в течение 15 мин. После промывания PBS срезы закрепляли с помощью Mowiol (Sigma-Aldrich) и исследовали с помощью вертикального микроскопа Olympus BX51 с использованием объективов 60x или 100x.Изображения были получены с помощью камеры CoolSNAP ES (Photometrics) через программное обеспечение MetaVue (Molecular Devices). Специальный полосовой фильтр для Cy3 использовался вместе со световым полем. Затем изображения были обработаны и проанализированы с помощью ImageJ ( 33 ). После отмывки в среде RPMI 1640 с добавлением пенициллина (100 Ед / мл) и стрептомицина (100 мкг / мл; все Invitrogen) для удаления внешних бактерий T. muris фиксировали в 4% PFA (мас. / Об.) В течение ночи и обрабатывали в течение ночи. РЫБА, как указано выше. Проглоченный GFP E. coli детектировали с использованием полосового фильтра флуоресцеина изотиоцианата.
После отмывки в среде RPMI 1640 с добавлением пенициллина (100 Ед / мл) и стрептомицина (100 мкг / мл; все Invitrogen) для удаления внешних бактерий T. muris фиксировали в 4% PFA (мас. / Об.) В течение ночи и обрабатывали в течение ночи. РЫБА, как указано выше. Проглоченный GFP E. coli детектировали с использованием полосового фильтра флуоресцеина изотиоцианата. Подвижность оценивали каждые 24 часа до 96 часов с использованием шкалы подвижности от 0 до 3 (0 — мертвый; 1 — очень низкая подвижность только на одном конце; 2 — низкая подвижность, которая ниже, чем в контроле; и 3 — нормальная подвижность). по сравнению с контрольной группой только среднего уровня для взрослых ( 34 ).Личинки L1 оценивали как процент живых по сравнению с контролем каждые 24 часа.
Подвижность оценивали каждые 24 часа до 96 часов с использованием шкалы подвижности от 0 до 3 (0 — мертвый; 1 — очень низкая подвижность только на одном конце; 2 — низкая подвижность, которая ниже, чем в контроле; и 3 — нормальная подвижность). по сравнению с контрольной группой только среднего уровня для взрослых ( 34 ).Личинки L1 оценивали как процент живых по сравнению с контролем каждые 24 часа.