
Кран РДК-25 (РДК-250) грузоподъемностью 25 т
Категория:
Краны стреловые самоходные
Публикация:
Кран РДК-25 (РДК-250) грузоподъемностью 25 т
Читать далее:
Кран РДК-25 (РДК-250) грузоподъемностью 25 т
Кран РДК-25 (РДК-250), рис. 4.357, имеет дизель-электрический привод. Основная стрела длиной 12,5 м состоит из двух секций, вставками удлиняется до 15,3; 17,5; 20,3; 22,5; 25,3; 27,5; 30,3; 32,5 и 35,3 м. Стрела может оснащаться гуськом длиной 5 м для вспомогательного подъема. Предусмотрено БСО: башня длиной 12,5—27,5 м и клюв длиной 10, 15 и 20 м. Всего 41 исполнение рабочего оборудования. Масса крана — 43—50 т. Дорожный просвет—450 мм. Среднее давление на грунт — 0,08—0,1 МПа (0,8—1 кг/см2).
Исполнения РДК-25-1 (РДК-250-1) и РДК-25-2 (РДК-250-2) отличаются массой противовеса при одинаковых грузовых характеристиках.
Рекламные предложения на основе ваших интересов:
Рис.
Рис. 2. РДК-25 ОП стрела 12,5 м
Рис. 3. РДК-250П стрела 15,3 м
Рис. 5. РДК-25 ОП стрела 20,3 м
Рис. 7. РДК-25 ОП стрела 25,3 м
Рис. 8. РДК-25 ОП стрела 27,5 м
Рис. 9. РДК-25 ОП стрела 30,3 м
Рис. 10. РДК-25 ВП стрела 25,3 м
Рис. 11. РДК-25 ВП стрела 27,5 м
Рис. 12. РДК-25 ВП стрела 30,3 м
Рис. 13. РДК-25 ВП стрела 32,5 м
Рис. 14. РДК-25 ВП стрела 35,3 м
Рис. 15. РДК-25 стрела 12,5— 5 м
Рис. 16. РДК-25 стрела 15,3— 5 м: 1 — основной подъем; 2 — вспомогательный подъем 1 — основной подъем; 2 — вспомогательный подъем
Рис. 17. РДК-25 стрела 17,5—5 м: 1 — основной подъем; 2 — вспомогательный подъем I — основной подъем; 2 — вспомогательный подъем
Рис. 18. РДК-25 стрела 20,3— 5 м:
Рис. 19. РДК-25 стрела 25,3—5 м: 1 — основной подъем; 2—вспомогательный подъем
Рис.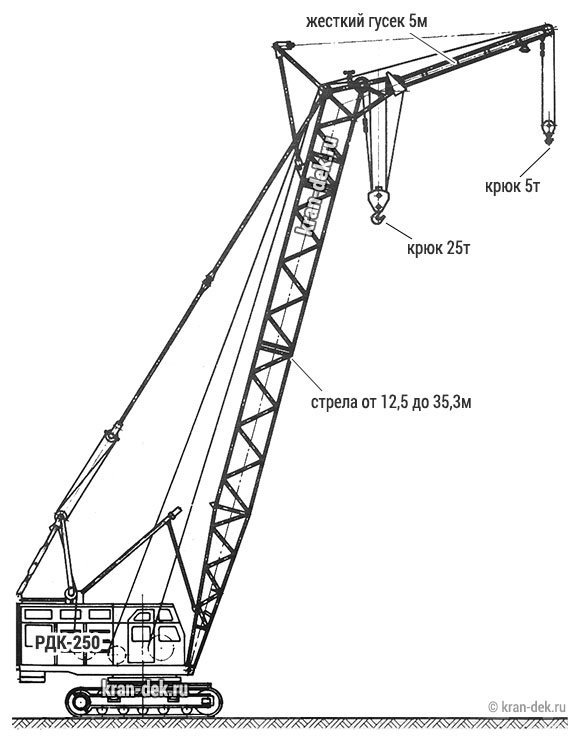 20. РДК-25 стрела 22,5— 5 м:
1 — основной подъем; 2 — вспомогательный подъем
20. РДК-25 стрела 22,5— 5 м:
1 — основной подъем; 2 — вспомогательный подъем
Рис. 21. РДК-25 стрела 27,5— 5 м:
Рис. 22. РДК-25 стрела 32,5— 5 м: 1 — основной подъем; 2 — вспомогательный подъем
Рис. 24. РДК-25 стрела 35,3— 5 м: 1 — основной подъем; 2 — вспомогательный подъем
Рис. 25. РДК-25 БСО 12,5—10 м
Рис. 26. РДК-25 БСО 12,5—15 м
Рис. 27. РДК-25 БСО 12,5—20 м
Рис. 28. РДК-25 БСО 15,3—10 м
Рис. 29. РДК-25 БСО 15,3-15 м
Рис. 30. РДК-25 БСО 15,3-20 м
Рис. 31. РДК-25 БСО 17,5—10 м
Рис. 32. РДК-25 БСО 17,5—15 м
Рис. 33. РДК-25 БСО 17,5-20 м
Рис. 34. РДК-25 БСО 20,3—10 м
Рис. 35. РДК-25 БСО 20,3—15 м
Рис. 36. РДК-25 БСО 20,3-20 М
Рис. 37. РДК-25 БСО 22,5—10 м
37. РДК-25 БСО 22,5—10 м
Рис. 38. РДК-25 БСО 22,5—20 м
Рис. 39. РДК-25 БСО 22,5—15 м
Рис. 41. РДК-25 БСО 25,3-15 м
Рис. 42. РДК-25 БСО 25,3—20 м
Рис. 43. РДК-25 БСО 27,5—10 м
Рис. 44. РДК-25 БСО 27,5-15 м
Рис. 45. РДК-25 БСО 27,5-20 м
Рекламные предложения:
Читать далее: Кран МКГ-40 грузоподъемностью 40 т
Категория: — Краны стреловые самоходные
Главная → Справочник → Статьи → Форум
Взять в аренду кран РДК 25 во Владимире
Ширина гусеничной ленты: 625 мм
Ширина поворотной платформы: 3150 мм
Длина ходовой части: 4710 мм
Радиус хвостовой части в рабочем положении: 3900 мм
Высота крана по блокам укосины в транспортном положении: 4300 мм
Дорожный просвет (клиренс): 450 мм
Основные характеристики крана РДК 25
Грузоподъемность максимальная главного, вспомогательного подъема: 25/5 т
Максимальный грузовой момент: 1160 (118,75) кНм (тс. м)
м)
Длина стрелы: 35 м
Длина гуська: 5 м
Высота подъема максимальная: 27 м
Максимальная глубина опускания: 5 м
Вылет: 4,75-24,5 м
Стоимость аренды: от 900 руб.(маш./час)
Кран РДК 25
Гусеничный кран РДК серии 25 или 250 – это надежная строительная техника, предназначенная для работы в тяжелых условиях. Она оснащена гусеничным шасси и телескопической стрелой, позволяющей поднимать грузы на высоту до 27 метров. Кран используется для прокладки трубопроводов и лесозаготовок, монтажа оборудования или ЖБИ-изделий, жилого и коммерческого строительства, перегрузки сыпучего груза при помощи грейфера, сваебойных и бурильных работ. Выпускается в нескольких конфигурациях, основные отличия – в силовой установке, двигателе и комфортности кабины.
Преимущества и особенности РДК 25
РДК 25 выпускается в башенно-стреловом и стреловом варианте. В первом вылет меняется за счет управляемого гуська, во втором оператор имеет возможность отрегулировать вылет за счет изменения наклона стрелы. Гусеничная платформа не предназначена для движения по дорогам общего пользования, поэтому технику доставляют на место при помощи автотранспорта.
В первом вылет меняется за счет управляемого гуська, во втором оператор имеет возможность отрегулировать вылет за счет изменения наклона стрелы. Гусеничная платформа не предназначена для движения по дорогам общего пользования, поэтому технику доставляют на место при помощи автотранспорта.
Технические характеристики РДК 25 позволяют использовать технику практически на любой стройке – грузоподъемность до 25 тонн, рабочая зона – 360 градусов, подъем до 27 метров, опускание до 5 метров, работает под управлением дизельного двигателя с водяным охлаждением, питание осуществляется от генератора в 380 Вольт.
Аренда РДК 25 во Владимире
Техника поставляется вместе с крановщиком, имеющим большой опыт работы и все необходимые допуски. Чтобы взять в аренду гусеничный кран РДК 25 во Владимире, вам достаточно позвонить в компанию Спецтехника в любое время – мы работаем круглосуточно. Мы гарантируем 100% исправность всей нашей техники – она регулярно проходит все ТО и эксплуатируется согласно рекомендаций производителя.
Для того, чтобы взять в аренду кран РДК 25, обращайтесь в компанию Спецтехника. Мы предлагаем клиентам выгодные условия сотрудничества. Наши преимущества:
- Доступные цены на аренду, возможность взять технику на нужный срок, приятные скидки для постоянных заказчиков и строительных организаций.
- 100% гарантия работоспособности. Краны ремонтируются оригинальными запчастями, регулярно проходят техобслуживание, поэтому мы гарантируем отсутствие простоев по нашей вине.
- Кран поставляется в аренду с опытным машинистом, имеющим допуски и разрешения на работу. Нанимать сотрудника и платить ему зарплату не понадобится.
- РДК 25 доставляется на объект и вывозится с него нашим автотранспортом с соблюдением необходимых правил и получением разрешений.
- Детальные консультации и помощь с подбором спецтехники, предоставление необходимых бухгалтерских документов.
Габаритные размеры башенного крана РДК-25.
Грузовысотная характеристика.

Слабое место в электросхеме крана RDK-25 (режим микроспуска)
Совместно разработанный советско-германский кран РДК успешно работал на больших стройках 70-х годов прошлого века.
РДК повсеместно применялся и используется до сих пор в стандартной комплектации и с доп.оборудованием для:
- прокладки трубопроводов;
- лесозаготовок;
- монтажа сборных ЖБИ, стальных конструкций;
- технологического оснащения пром.объектов;
- промышленного и жилого строительство с нулевого цикла до окончания работ;
- дорожного строительства, монтажа дорожных покрытий, сооружений;
- монтажа сваевдавливающего оборудования СВУ-В-6 и копровых мачт (КОГ-12) — как базовая машина;
- бурильные работы, сваебой;
- разработки горных пород;
- перегруз сыпучих грузов установленным грейфером.
Установка грейфера возможна только в стреловом варианте.
Технические характеристики
Кран РДК-250 имеет стандартную стрелу длиной 12. 5 метра. Для обеспечения безопасности работ устанавливается специализированная система, предотвращающая перегруз и риск опрокидывания крана, а также контролирующая опасное приближение к опорам ЛЭП.
5 метра. Для обеспечения безопасности работ устанавливается специализированная система, предотвращающая перегруз и риск опрокидывания крана, а также контролирующая опасное приближение к опорам ЛЭП.
Основные технические характеристики гусеничного крана РДК-25 (рдк-250) рассмотрим в таблице:
| Характеристики | Показатели |
| Длина основной стрелы, м | 12,5 |
| Длина стрелы максимальная, м | 35,2 |
| Длина жесткого гуська, м | 5 |
| Вылет минимальный, м | 1,75 |
| Вылет максимальный (с основной стрелой), м | 13,6 |
| Длина мачты (башенно-стреловое исполнение), м | 12,5 — 27,5 |
| Длина управляемого гуська, м | 10; 15; 20 |
| Грузоподъемность на минимальном вылете, т | 25 |
| Грузоподъемность на максимальном вылете, т | 3,6 |
| Грузоподъемность вспомогательного подъема, т | 5 |
| Грузовой момент максимальный, т*м | 100 |
| Высота подъема при минимальном вылете (главный крюк), м | 12,4 |
| Высота подъема при максимальном вылете (главный крюк), м | 7 |
| Высота подъема при минимальном вылете (вспомогательный крюк), м | 15,7 |
| Высота подъема при максимальном вылете (вспомогательный крюк), м | 6 |
| Вес с основной стрелой, т | 45,2 |
| Среднее давление на грунт, МПа | 0,085 |
| Мощность электродвигателей, кВт | 75 |
| Габаритные размеры (без стрелы), мм | 3225х6300х4300 |
Силовая установка
По мере модернизации на кран устанавливали разные модели дизельных двигателей водяного охлаждения, основные характеристики этих моторов приведены в таблице.
| Двигатель | А01-МЕ | Д-108 | Д-440 |
| Модификации крана | РДК 250, РДК — 250-1 | РДК 250-1, РДК 250-2 | РДК 250-3, РДК 250-4 |
| Кол-во цилиндров | 6 | 4 | 4 |
| Рабочий объем, л | 11,5 | — | — |
| Мощность, л.с. | 130 | 108 | 98 |
| Способ смессеобразования | непосредственный впрыск | ||
| Номинальная частато вращения, об/мин | 1500 | 1140 | 1750 |
| Макс. крутящий момент, Н.м | 683 | 750 | 533 |
| Удельный расход топлива, г/л.с. *ч | 167 | 175 | 168 |
Скорость рабочего движения
Вращение полноповоротной платформы крана с грузом возможно с максимальной скоростью 0.27 об/мин.
Максимальная скорость вращения без груза – 1. 13 об/мин при условии использования стрелы длиной не более 27.5 м.
13 об/мин при условии использования стрелы длиной не более 27.5 м.
Скоростные характеристики по подъему и спуску крюка отражены в таблицах:
- В стреловом исполнении:
| Главный подъем | Вспомогательный подъем | |
| Подъем при установленных стрелах 12.5; 15.3; 17.5; 20.3; 22.5; 25.3, м/мин | 0,37; 7,37 | 15,7 |
| Подъем при установленных стрелах 27.5; 30.3; 32.5; 35.3, м/мин | 0,74; 14,74 | 15,7 |
| Опускание при установленных стрелах 12.5; 15.3; 17.5; 20.3; 22.5; 25.3, м/мин | 0,4; 2,6; 7,8 | 4,5; 16 |
| Опускание при установленных стрелах 27.5; 30.3; 32.5; 35.3, м/мин | 0,8; 5,2; 15,6 | 4,5; 16 |
- В башенно-стреловом исполнении:
| Главный подъем | |
| Подъем с управляемым гуськом 10 м, м//мин | 0,37; 7,37 |
| Подъем с управляемым гуськом 15, 20 м, м/мин | 0,74; 14,74 |
| Опускание с управляемым гуськом 10 м, м/мин | 0,4; 2,6; 7,8 |
| Опускание с управляемым гуськом 15, 20 м, м/мин | 0,8; 5,2; 15,6 |
Максимальная рабочая скорость передвижения крана – 16. 6 м/мин, транспортная – 19.5 м/мин.
6 м/мин, транспортная – 19.5 м/мин.
Электрооборудование
Для питания механизмов крана установлен 3-х фазный генератор мощностью 75 кВт, 380 В. Два электродвигателя приводят в действия гусеницы шасси.
Характеристики электродвигателей указаны в таблице.
| Главный подъем | Вспомогат. подъем | Передвижение | Изменение вылета | Поворот | ||
| Маркировка | SMH 225 M8 | KMR 112 Mx8 | SMH 160 M4 | SMH 200 M8 | KMR 132 M6 | KMR 160 M16-4 |
| Ток номинальный, А | 70 | 7,9 | 32 | 50 | 16,5 | 9,8/16 |
| Скорость вращения, об/мин | 750 | 750 | 1500 | 750 | 1000 | 375/1500 |
| Вес, кг | 440 | 54 | 150 | 100 | 40 | 40/13 |
Электросхема крана РДК 25
Монтаж регулятора давления конденсации
Выбираем место для установки самого РДК 8.4 — это любое свободное место внутри корпуса кондиционера, главное, чтобы провода достали до клеммной колодки, а датчик до конденсора, обычно его длины хватает с запасом.
Закрепляем корпус регулятора саморезами к металлической стенке кондиционера.
Находим место установки датчика (об этом расскажем ниже) и закрепляем его стяжками. Для лучшего теплового контакта с трубкой теплообменника необходимо смазать её термопастой, а уже после этого устанавливать датчик температуры. Термопаста идёт в комплекте с РДК 8.4 Сам датчик нельзя изгибать, чтобы не повредить, поэтому располагать его надо вдоль трубки. а не закручивать вокруг неё. После монтажа датчика его надо теплоизолировать, например полоской «флекса» или сырой резины.
Термопаста идёт в комплекте с РДК 8.4 Сам датчик нельзя изгибать, чтобы не повредить, поэтому располагать его надо вдоль трубки. а не закручивать вокруг неё. После монтажа датчика его надо теплоизолировать, например полоской «флекса» или сырой резины.
Устройство
Кран базируется на гусеничном шасси, ширина используемых гусениц составляет 625 мм. Установленная кабина имеет вибро- и звукозащиту. Для комфорта работы установлен отопитель.
Рабочее оборудование может быть двух видов:
- Стреловое. Стандартная стрела имеет длину 12.5 метра. Наращивание ее осуществляется при помощи дополнительных решетчатых вставок длиной 5 или 10 м. Соединение секций стрелы осуществляется при помощи безрезьбовых пальцев, что повышает скорость монтажа. Опционально может быть установлен жесткий гусек длиной 5 м.
- Башенно-стреловое. Решетчатая мачта закреплена неподвижно при помощи тросов-оттяжек. К мачте крепится управляемый (маневровый) гусек длиной 10, 15 или 20 м, при перемещении которого изменяется вылет.


Для обеспечения грузоподъемности в 25 т главный подъем использует 3-х блочную крюковую обойму. Во вспомогательном подъеме используется один блок.Устройство и габаритные размеры гусеничного крана РДК 25
Кран имеет дизель-электрический привод. Для автономной работы может использоваться установленный дизельный двигатель, подключенный к электрическому генератору. Для запуска основного двигателя смонтирован небольшой бензиновый мотор. Все механизмы крана оснащены индивидуальными электроприводами.
В качестве альтернативы возможно подключение крана к электросети напряжением 380 В, 50 Гц. Потребляемый ток – 125 А.
Грузовысотные диаграммы крана РДК-250 (РДК-25)
| cтрела 12,5м cтрела 17,5м cтрела 22,5м cтрела 27,5м cтрела 32,5м | cтрела 12,5м + жесткий гусек cтрела 17,5м + жесткий гусек cтрела 22,5м + жесткий гусек cтрела 27,5м + жесткий гусек cтрела 32,5м + жесткий гусек | башня 12,5м + маневровый гусек башня 17,5м + маневровый гусек башня 22,5м + маневровый гусек башня 27,5м + маневровый гусек |
Руководство по использованию и монтажу РДК-8
Регулятор Давления Конденсации РДК-8
Руководство по монтажу и эксплуатации.
Регулятор давления компенсации РДК-8 (далее прибор), является микропроцессорной системой и предназначен для обеспечения работоспособности систем кондиционирования, работающих в режимах «охлаждение», либо «охлаждение-нагрев» номинальной мощностью до 14 кВт, при отрицательных значениях температуры окружающей среды, вплоть до -40С. Прибор позволяет эффективно поддерживать давление конденсации на номинальном уровне, независимо от изменений температуры окружающей среды и обеспечивает сохранение холодопроизводительности системы до 90% от номинальной. Так же исключается ряд негативных явлений: Исключается обмерзание внутреннего блока кондиционера. Уменьшается время переходного процесса в работе компрессора. Исключается превышение допустимой температуры нагнетания компрессора. Снижается риск повреждения деталей 4-х ходового клапана. Прибор осуществляет регулирование, анализируя давление конденсации посредствам термодатчика, закрепленного на змеевике теплообменника внешнего блока. Прибор имеет индикацию режимов работы, а так же индикацию результата самодиагностики исправности термодатчика (см. индикация режимов работы). Прибор выпускается в двух модификациях: РДК-8.4 – с полупроводниковым термодатчиком, РДК-8.8 – с цифровым термодатчиком температуры.
индикация режимов работы). Прибор выпускается в двух модификациях: РДК-8.4 – с полупроводниковым термодатчиком, РДК-8.8 – с цифровым термодатчиком температуры.
Технические характеристики:
Напряжение питания (В) – 220 +/- 10% Максимальная потребляемая мощность (Вт) – 0,5 Максимальный ток нагрузки (А) – 3,5 Диапазон рабочих температур (С) — -40…+70 Габариты (ШхВхГ) мм. – 105х65х30 Масса прибора (гр.) – 135 Режим работы – непрерывный
Монтаж датчика.
Монтаж прибора производится на обесточенном оборудовании с соблюдение всех мер и требований техники безопасности!!!
Демонтировать панели, крышки на наружном блоке кондиционера, для установки прибора и датчика температуры. Определить место установки термодатчика. Датчик должен быть закреплен в середине змеевика теплообменника. В случае применения 2-х и более секционного конденсатора, термодатчик устанавливается в середине змеевика любой (наиболее удобной для монтажа) секции. Датчик должен быть установлен на «каланчах» находящихся со стороны расположения компрессора и блока электроники. НЕ рекомендуется установка датчика на противоположной стороне конденсатора, так как на его показания, а следовательно и качество работы прибора, может повлиять воздушный поток, создаваемый вращение вентилятора. Закрепить датчик, предварительно нанеся на место контакта датчика с медной трубкой конденсатора теплопроводящую пату КПТ-8. Плоскость датчика должна быть прижата к трубке конденсатора. НЕ рекомендуется способ крепления датчика, показанный на фото 1, т.к. высока вероятность повреждения датчика и возможно (как показала практика) ослабление «замка» стяжки при перепадах температуры.
НЕ рекомендуется установка датчика на противоположной стороне конденсатора, так как на его показания, а следовательно и качество работы прибора, может повлиять воздушный поток, создаваемый вращение вентилятора. Закрепить датчик, предварительно нанеся на место контакта датчика с медной трубкой конденсатора теплопроводящую пату КПТ-8. Плоскость датчика должна быть прижата к трубке конденсатора. НЕ рекомендуется способ крепления датчика, показанный на фото 1, т.к. высока вероятность повреждения датчика и возможно (как показала практика) ослабление «замка» стяжки при перепадах температуры.
Фото 1 Фото 2Закрепленный термодатчик необходимо изолировать от окружающей среды с помощью самоклеящейся теплоизолирующей ленты или отрезка термоизоляции и зафиксировать стяжками, как показано на фото 2. Это необходимо для более высокой точности регулировки давления конденсации!
Подключение прибора.
(все соединения производятся согласно схеме на рис.1)
Соедините СИНИЙ
провод прибора с «нулевым» проводом внешнего блока (помочен символом –N). Соедините
Соедините
КОРИЧНЕВЫЙ
провод прибора с «фазовым» проводом (помечен символом – L) В случае, когда электропитание подводится только к внутреннему блоку, потребуется дополнительно провести провод от клеммы внутреннего блока к
коричневому
проводу прибора. Провод, на котором постоянно присутствует «фаза» потребуется в дальнейшем и для питания нагревателей (картера, дренажа, капиллярной трубки). Соедините
СЕРЫЙ
провод прибора:
- Для работы в режиме только «охлаждение» с нулевым проводом символ N (показано пунктиром).
- Для работы в режиме «охлаждение-нагрев» с проводом управления 4-х ходовым клапаном.
Отсоедините (разорвите) провод питания вентилятора. Соедините ЖЕЛТЫЙ
провод прибора с точкой 1 (рис.1) Соедините
ЧЁРНЫЙ
провод прибора с точкой 2 (рис.1) По окончании электроподключения прибор необходимо закрепить в блоке с помощью саморезов, стяжек, либо двустороннего скотча, предпочтительно на дне блока. Если осуществляется фиксация на «переборке» необходимо обеспечить зазор между корпусом прибора и соприкасемой поверхностью.
Если осуществляется фиксация на «переборке» необходимо обеспечить зазор между корпусом прибора и соприкасемой поверхностью.
Примечания
В случае если двигатель вентилятора имеет несколько обмоток, потребуется определить обмотку, отвечающую за максимальную скорость вращения вентилятора. К ЧЁРНОМУ
проводу прибора подключается только она. Остальные проводники так же разрываются и со стороны вентилятора изолируются.
ВСЕ
оставшиеся свободными проводники скоростей вентилятора, идущие от схемы управления, соединяются с
ЖЕЛТЫМ
проводом. (Рис.2) В случае установки прибора в блоки с 2-мя вентиляторами подключаем прибор только к нижнему вентилятору (т.к. при пониженных температурах работает только он). Схему управления другим вентилятором оставляем без изменений. В случае установки прибора в блоки с 3-х фазным электропитанием,
КОРИЧНЕВЫЙ
провод прибора необходимо подключить к той «фазе», от которой осуществляется питание вентиляторов блока.
Индикация режимов работы.
- При подаче напряжения на блок, светодиод прибора начинает непрерывно мигать (прибор включен, находится в режиме ожидания).
- При поступлении сигнала на включение вентилятора, светодиод индицирует одну короткую вспышку, с интервалом 4 сек. (прибор анализирует температуру и управляет вентилятором).
- При работе в режиме «тепло» светодиод индицирует две короткие вспышки, с интервалом в 4 сек. (Прибор работает в «прозрачном» режиме дублирует команды внутреннего блока).
- В случае замыкания датчика (либо его провода) светодиод индицирует одну короткую и одну длинную вспышки.
- В случае обрыва датчика (либо его провода) светодиод индицирует одну короткую и две длинные вспышки.
Комплект:
- Регулятор давления конденсации.
- Руководство по эксплуатации.
- Комплект стяжек.
- Паста КПТ- 8.
СХЕМА ПОДКЛЮЧЕНИЯ
Правила транспортировки и хранения:
Транспортировка прибора допускается всеми видами закрытого транспорта. Прибор должен транспортироваться, и хранится при температуре от -50С до +50С. Воздух в помещении не должен содержать агрессивных паров и газов. При транспортировке и хранении прибора не допускать механических воздействий.
Прибор должен транспортироваться, и хранится при температуре от -50С до +50С. Воздух в помещении не должен содержать агрессивных паров и газов. При транспортировке и хранении прибора не допускать механических воздействий.
Гарантии изготовителя.
Гарантийный срок работы прибора составляет 2 года с момента продажи. В течение гарантийного срока покупатель имеет право на ремонт или замену прибора при обнаружении неисправностей, произошедших по вине изготовителя.
Гарантия не распространяется на приборы с механическими повреждениями, а так же при несоблюдении потребителем правил монтажа, эксплуатации и хранения, ремонте прибора потребителем или третьим лицом.
Модификации
Кран РДК-25 начал производиться в 1967 году. Впоследствии были проведены несколько модернизаций этого ставшего очень востребованным крана:
- В 1972 году на смену РДК-25 пришла модификация РДК 250-1. Первый кран новой модификации имел заводской № 1390. Краны с номерами с 3742 по 6009 были оснащены новым двигателем Д-108.
- В 1980 году начался выпуск РДК 250-2, в котором появилась новая кабина оператора. Прежняя выступала за габариты крана, что не укладывалось в допустимые размеры (в первую очередь по высоте), принятые при железнодорожных перевозках в СССР. Прежнюю кабину приходилось демонтировать, с новой такая необходимость отпала. Заводские номера этой модификации – с 6010 по 12049.
- Модификация РДК 250-3 имела новый двигатель, а также устройство защиты от приближения к линиям ЛЭП, начало производства – 1988 год. Заводские номера этой модификации – с 12050 по 13448.
- Модификация РДК 250-4 была предназначена для функционирования при экстремально низких температурах, до -60?C, и выпускалась с 1990 года. Было установлено дополнительное утепление кабины, а также предпусковой обогреватель двигателя. Всего выпущено 6 таких кранов.

Продуманность конструкции, удобное управление, функциональность, надежность и высокие характеристики этого крана остаются востребованными и поныне. На видео возможности гусеничного крана РДК-25:
На видео возможности гусеничного крана РДК-25:
Подготовка кондиционера к установке
Разбираем корпус внешнего блока кондиционера и снимаем с компрессора теплоизоляционный кожух.
Откручиваем винты на корпусе кондиционера.
Быстрее всего это сделать с помощью шуруповёрта.
Разбираем кондиционер для доступа к «калачам» теплообменника в правой части кондиционера.
Для этого нам пришлось разобрать почти весь кондиционер — снять верхнюю крышку, переднюю часть и часть корпуса с правого торца.
Особенности эксплуатации
Кран РДК-25 предназначен для использования при самых разных температурах в диапазоне от -40?C до +40?C. Для работы при низких значениях температур предназначена «полярная» модификация РДК-250-4.
Максимальная скорость ветра при работе должна быть менее 15 м/сек. В случае, если скорость ветра превышает значение в 20 м/сек, рабочее оборудование, в соответствии с существующей инструкцией, должно быть опущено. Согласно карте районирования территории по ветровым нагрузкам, отраженной в ГОСТ 1451-77, эксплуатация крана РДК-250 допускается в районах до 3-го пояса ветровых нагрузок.
Учитывая низкую скорость передвижения крана, достаточную только для перемещения в пределах рабочей площадки, а также невозможность движения по общим дорогам по причине высокого износа гусеничной ленты и разрушения дорожного покрытия, транспортировка крана осуществляется следующими способами:
- Автотранспортом. Для перевозки шасси с поворотной платформой необходимо использовать прицеп грузоподъемностью 40 т, стреловое оборудование допускается перевозить при помощи бортовых транспортных средств.
- Ж/Д транспортом. Частично разобранный кран перевозится на двух платформах грузоподъемностью по 60 т.
- Водным транспортом.
Возможности применения РДК-250
Гусеничный кран данной модификации предполагает эксплуатацию в широком температурном диапазоне: от – 40оС до + 40оС. Для выполнения строительных задач в суровых климатических условиях разработана «полярная» версия РДК-250.
Максимально допустимая скорость потоков ветра во время работы крановой установки должна быть не более 15 м/сек. , если показатели повысились до 20 м/сек., то работа прекращается с целью предотвращения аварийных ситуаций на строительной площадке. Согласно нормативным документам, применение РДК-250 возможно до третьей степени ветровых нагрузок.
, если показатели повысились до 20 м/сек., то работа прекращается с целью предотвращения аварийных ситуаций на строительной площадке. Согласно нормативным документам, применение РДК-250 возможно до третьей степени ветровых нагрузок.
РДК-250 в работе
Скорость перемещения крана, износ гусеничной ленты и большая масса обуславливают необходимость транспортировки спецтехники с применением следующих видов транспорта:
- Автомобильный. Стреловое оборудование транспортируется бортовым транспортом, а поворотная платформа доставляется при помощи прицепа грузоподъемностью 40 т.
- Железнодорожный. В разобранном виде спецтехника транспортируется двумя платформами грузоподъемностью более 60 т.
- Морской.
Вакансии, трудоустройство | jobs.kz
— Категория -Авиация, АэропортАдминистрация / КанцелярияБанковское делоБезопасностьБухгалтерия / ФинансыГосударственная службаДобыча, переработка сырьяДругоеЗакупкиИнформационные ТехнологииИскусствоКонтроль качества Маркетинг, Реклама, PR Масс-медиа Медицина, ЗдоровьеМонтаж, обслуживание, ремонтНаучные исследования, наука, образование Недвижимость, СтроительствоНеправительственная организацияПродажи Производство, промышленностьСтрахованиеТоп МенеджментТранспорт, ЛогистикаТуризм, гостиницы, рестораны, обслуживаниеУправление Человеческими РесурсамиФитнес, Салоны Красоты, SPAЮридическая сфера
— Тип -ВакансияТренинигТендерДругое
— Опыт -Без опыта работыМенее 1 года1 — 2 года2 — 3 года3 — 5 года5 — 7 года7 — 10 годаБолее 10 лет
— Местоположение -Нур-СултанАбайАкколь АксайАксуАктауАктобеАктогайАлгаАлматыАральскАркалыкАрысьАтбасарАтырауАягозБайконурБалхашБейнеуБулаевоГлубокоеДержавинскЕрейментауЕсикЖанаозенЖаркентЖезказганЖетикараЖетысайЗайсанЗыряновскКарагандаКаскеленКентауКокшетауКостанайКызылордаЛенгерМакинскМеркеПавлодарПетропавловскРиддерРудныйСарыагашСемейСтепногорскСтепнякТалдыкорганТаразТекелиТемиртауТургайТуркестанУральскУсть-КаменогорскХромтауШалкарШемонаихаШымкентЩучинскЭкибастузДругоеЗа границей
— Заработная плата -0 — 100000100001 — 150000150001 — 200000200001 — 250000250001 — 300000300001 — 400000400001 — 500000500001 — 600000600000+
— Опубликованный -СегодняВчераЗа последние 3 дняЗа последние 5 днейНа прошлой неделеЗа последние 2 неделиЗа последние 3 неделиВ прошлом месяце
ПоискОткрытое акционерное общество «Отдел механизации №12»
Дом »Компании »Открытое акционерное общество« Отдел механизации №12 »Количество сотрудников: 31-100 человек
Открытое акционерное общество «Отдел механизации №12» — предприятие, специализирующееся на эксплуатации подъемной техники и оказывающее услуги строительным предприятиям по транспортировке и доставке большегрузных строительных конструкций и техники; Также оказывает услуги по техническому обслуживанию и текущему ремонту подъемных кранов, ремонту электрооборудования подъемных кранов. В настоящее время в нашей организации: 68 мобильных гусеничных кранов, 15 автокранов, 2 гидроцилиндра, 1 универсальный колесный погрузчик, 27 единиц специального грузового транспорта для обслуживания и ремонта. «Управление механизации №12» также имеет технологический транспорт для перемещения кранов и оказывает услуги по перевозке тяжеловесной (до 70 тонн) и крупногабаритной техники, перевозки опасных грузов. Прочие услуги, предоставляемые нашим предприятием: — Монтаж, наладка и мелкий ремонт предохранительных устройств подъемных кранов всех типов; — Заключение технической диагностики автокранов при возможности дальнейшей эксплуатации; — Услуги электротехнической лаборатории по домену аккредитации; — Ремонт крановых электродвигателей, генераторов и гидротолкателей.
В настоящее время в нашей организации: 68 мобильных гусеничных кранов, 15 автокранов, 2 гидроцилиндра, 1 универсальный колесный погрузчик, 27 единиц специального грузового транспорта для обслуживания и ремонта. «Управление механизации №12» также имеет технологический транспорт для перемещения кранов и оказывает услуги по перевозке тяжеловесной (до 70 тонн) и крупногабаритной техники, перевозки опасных грузов. Прочие услуги, предоставляемые нашим предприятием: — Монтаж, наладка и мелкий ремонт предохранительных устройств подъемных кранов всех типов; — Заключение технической диагностики автокранов при возможности дальнейшей эксплуатации; — Услуги электротехнической лаборатории по домену аккредитации; — Ремонт крановых электродвигателей, генераторов и гидротолкателей.
Услуги
Беларусь
Кран дизель-электрический Caterpillar РДК 25 г / п 25 тн.
Беларусь
Автокран КС 65721 Грузоподъемность 60 тонн, длина стрелы 42 м.+ Удлинитель 15 м.
Беларусь
Грузоподъемность 40 тонн, длина стрелы 34 метра + удлинитель 9 метров.
Беларусь
Грузоподъемность 36 т., Длина стрелы 35 м., Стрела башенного исполнения.
Беларусь
Кран DEC 401, грузоподъемность 40 тонн, стрела 35 метров, стрела 5 или 10 метров.
Беларусь
Грузоподъемность 20 тонн, открытый борт.
Беларусь
Автокран г / п 25 т, длина стрелы 28 м.
Беларусь
Полезная нагрузка 3.8 тонн, высота подъема 3 метра. Объем ковша — 2,3 куб.м.
ПРОЕКТНО-СТРОИТЕЛЬНАЯ КОМПАНИЯ «ЛИДЕР»
Услуги строительной техники
Одним из дочерних предприятий ООО «Лидер ЕКС» является Департамент механизации ООО «Гарант-100». Мы готовы предоставить услуги в любом из следующих механизмов по ценам согласно прайс-листу
. На балансе нашего управления механизации
На балансе нашего управления механизациинаходится строительная техника в количестве 34 единиц.
| Название станка или механизма | Кол-во. | Год выпуска | Фото |
|---|---|---|---|
| Кран колесный КС-5363 г / с 25 т | 2 | 1979, 1982 | |
| Краны башенные КБ-403 | 1 | 1984 | |
| Кран РДК-250-2 | 1 | 1988 | |
| Кран-вагонетка КС-55713-1 г / с 25 т | 2 | 2004 | |
| Кран-вагонетка КС-3577 г / п 14 тн | 1 | 1991 | |
| Кран-вагонетка КС 45717 г / с 25 т | 1 | 2002 | |
| грузовики КАМАЗ г / п 10 т | 2 | 1999, 2000 | |
| грузовики КАМАЗ г / п 14 тн | 1 | 2007 | |
| тягач с полуприцепом МАЗ г / п 12 тн | 1 | 2000 | |
| тягач с полуприцепом МАЗ г / с 20 т | 2 | 2005 | |
| тягач с полуприцепом КАМАЗ г / с 20т | 1 | 2006 | |
| SUN Tower-22 | 1 | 1990 | |
| Экскаватор ЭО-3322 | 2 | 1990 | |
| Экскаватор ЭК-18 | 2 | 2005, 2006 | |
| Трактор Т-40 | 1 | 1989 | |
| А / м на борту ГАЗ-3302 | 1 | 2003 | |
| А / м УАЗ-22069 | 1 | 2006 | |
| А / м УАЗ-396252 | 1 | 2003 | |
| Автобус ПАЗ-320530 | 1 | 2004 | |
| ГАЗ-32213 | 2 | 2007 | |
| — полуприцеп цементовоз на ЗИЛ-130 | 1 | 1985 | |
| Бульдозер ДТ-75 | 1 | 2006 | |
| Вилочный погрузчик JCB-540-70 | 1 | 2007 | |
| КАМАЗ 4 м3 | 1 | 2000 | |
| КАМАЗ 7 М3 | 1 | 2005 | |
| Автобетононасос ISUZU | 1 | 1991 | |
| Ролик ДУ-85 | 1 | 2001 |
Упреждающие плавные движения глаз с кинематограммами со случайными точками
Abstract
Были изучены плавные движения глаз с опережением в ответ на ожидания движения кинематограмм со случайными точками (RDK). Время жизни точки было ограничено (52–208 мс), чтобы предотвратить выделение и отслеживание движения локальных элементов и нарушить восприятие объекта, движущегося в пространстве. Ожидаемые плавные движения глаз были обнаружены в ответ на сигналы, сигнализирующие о будущем направлении глобального движения RDK, либо до начала RDK, либо до изменения его направления движения. Сигналы, сигнализирующие о продолжительности жизни точек, не были эффективными. Эти результаты показывают, что упреждающие плавные движения глаз могут быть вызваны ожиданиями глобального движения и не требуют устойчивого представления объекта или набора объектов, движущихся в пространстве.В то же время некоторые свойства глобального движения (направление) были более чувствительны к сигналам, чем другие (время жизни точки), что позволяет предположить, что правила, по которым действует предсказание, влияя на преследование, могут выходить за рамки простых ассоциаций между сигналами и приближающимся движением целей.
Время жизни точки было ограничено (52–208 мс), чтобы предотвратить выделение и отслеживание движения локальных элементов и нарушить восприятие объекта, движущегося в пространстве. Ожидаемые плавные движения глаз были обнаружены в ответ на сигналы, сигнализирующие о будущем направлении глобального движения RDK, либо до начала RDK, либо до изменения его направления движения. Сигналы, сигнализирующие о продолжительности жизни точек, не были эффективными. Эти результаты показывают, что упреждающие плавные движения глаз могут быть вызваны ожиданиями глобального движения и не требуют устойчивого представления объекта или набора объектов, движущихся в пространстве.В то же время некоторые свойства глобального движения (направление) были более чувствительны к сигналам, чем другие (время жизни точки), что позволяет предположить, что правила, по которым действует предсказание, влияя на преследование, могут выходить за рамки простых ассоциаций между сигналами и приближающимся движением целей.
Ключевые слова: упреждающие плавные движения глаз, упреждающее преследование, плавное преследование, кинематограмма со случайными точками, глобальное движение, движение объекта, восприятие движения, ожидания, движения глаз
Введение
Плавное преследование движений глаз поддерживает линию взгляда на выбранные движущиеся цели, позволяя сетчатке скорости целей оставаться на уровнях, поддерживающих четкое зрение. За последние десятилетия был достигнут значительный прогресс в понимании природы сигналов движения, которые способствуют контролю преследования, нейронных путей, участвующих в преобразовании сигналов движения в двигательную команду преследования, и вклада сигналов высокого уровня, включая ожиданий и прогнозов для генерации реакции преследования (Barnes, 2008; Heinen & Keller, 2003; Kowler, 2011; Krauzlis, 2004; Lisberger, 2010; Spering & Montagnini, 2011).
За последние десятилетия был достигнут значительный прогресс в понимании природы сигналов движения, которые способствуют контролю преследования, нейронных путей, участвующих в преобразовании сигналов движения в двигательную команду преследования, и вклада сигналов высокого уровня, включая ожиданий и прогнозов для генерации реакции преследования (Barnes, 2008; Heinen & Keller, 2003; Kowler, 2011; Krauzlis, 2004; Lisberger, 2010; Spering & Montagnini, 2011).
Ожидания и предсказания имеют решающее значение для эффективного плавного преследования, поскольку они помогают преодолеть неизбежные задержки в обработке, тем самым избегая больших или неожиданных несоответствий между движением цели и движением глаза (Collewijn & Tamminga, 1984; Dallos & Jones, 1963; Додж, Трэвис и Фокс, 1930; Вестхаймер, 1954).
Роль ожиданий и прогнозов в управлении преследованием демонстрируется упреждающими плавными движениями глаз. Упреждающие плавные движения глаз — это плавные движения глаз в направлении ожидаемого будущего движения цели, которые наблюдаются либо до начала движения цели, либо до ожидаемого изменения направления движения (Badler, Lefèvre, & Missal, 2010; Boman & Hotson, 1988, 1992; de Hemptinne, Lefèvre, & Missal, 2008; Eggert, Ladda, & Straube, 2009; Heinen, Badler, & Ting, 2005; Jarrett & Barnes, 2002; Kowler, 1989; Kowler & Steinman, 1979a, 1979b; Ladda, Eggert, Glasauer, & Straube, 2007). Упреждающие плавные движения глаз могут быть вызваны символическими сигналами, раскрывающими направление будущего движения (Badler, et al., 2010; de Hemptinne et al., 2008; Eggert et al., 2009; Jarrett & Barnes, 2002; Kowler, 1989). ; Ladda et al., 2007; Winges & Soechting, 2011), или, в отсутствие подсказок, ожиданиями, вытекающими из предшествующей истории движений цели (Burke & Barnes, 2008; Collins & Barnes, 2009; de Hemptinne, Nozaradan , Duvivier, Lefèvre, & Missal, 2007; Heinen et al., 2005; Ковлер, 1989; Ковлер, Мартинс и Павел, 1984; Мэриотт, Нойс и Секулер, 2011 г .; Янг и Лисбергер, 2010). Нейрофизиологические исследования на обезьянах связали упреждающие плавные движения глаз с активностью дополнительных глазных полей (SEF), указывая на SEF как на сайт, который может быть ответственным за инициирование или контроль упреждающих движений (de Hemptinne et al., 2008; Heinen , 1995; Missal & Heinen, 2004).
Упреждающие плавные движения глаз могут быть вызваны символическими сигналами, раскрывающими направление будущего движения (Badler, et al., 2010; de Hemptinne et al., 2008; Eggert et al., 2009; Jarrett & Barnes, 2002; Kowler, 1989). ; Ladda et al., 2007; Winges & Soechting, 2011), или, в отсутствие подсказок, ожиданиями, вытекающими из предшествующей истории движений цели (Burke & Barnes, 2008; Collins & Barnes, 2009; de Hemptinne, Nozaradan , Duvivier, Lefèvre, & Missal, 2007; Heinen et al., 2005; Ковлер, 1989; Ковлер, Мартинс и Павел, 1984; Мэриотт, Нойс и Секулер, 2011 г .; Янг и Лисбергер, 2010). Нейрофизиологические исследования на обезьянах связали упреждающие плавные движения глаз с активностью дополнительных глазных полей (SEF), указывая на SEF как на сайт, который может быть ответственным за инициирование или контроль упреждающих движений (de Hemptinne et al., 2008; Heinen , 1995; Missal & Heinen, 2004).
Настоящее исследование было проведено, чтобы определить, необходимы ли представления движения объекта для создания упреждающих плавных движений глаз. Цели, использованные в предыдущих исследованиях упреждающих плавных движений глаз, обычно были небольшими целями, движущимися либо на однородном, либо на структурированном визуальном фоне, во многом как движущиеся цели, встречающиеся в естественной среде. Такие стимулы передают четкое и устойчивое восприятие объекта, движущегося в пространстве. Необходимы ли такие представления движения объекта для создания упреждающих плавных движений глаз? Учитывая, что упреждающие плавные движения глаз часто описываются как явление высокого уровня, было бы разумно предположить, что ожидаемое движение должно напоминать движение естественных объектов, чтобы вызвать упреждающую реакцию.В качестве альтернативы любой ожидаемый сигнал движения может вызвать упреждающую реакцию.
Цели, использованные в предыдущих исследованиях упреждающих плавных движений глаз, обычно были небольшими целями, движущимися либо на однородном, либо на структурированном визуальном фоне, во многом как движущиеся цели, встречающиеся в естественной среде. Такие стимулы передают четкое и устойчивое восприятие объекта, движущегося в пространстве. Необходимы ли такие представления движения объекта для создания упреждающих плавных движений глаз? Учитывая, что упреждающие плавные движения глаз часто описываются как явление высокого уровня, было бы разумно предположить, что ожидаемое движение должно напоминать движение естественных объектов, чтобы вызвать упреждающую реакцию.В качестве альтернативы любой ожидаемый сигнал движения может вызвать упреждающую реакцию.
Недавние результаты Montagnini, Spering и Masson (2006) подтвердили точку зрения, что сигналы, представляющие движение объекта, необходимы для генерации упреждающих реакций, а другие, более примитивные сигналы движения неэффективны. Этот вывод был основан на их выводах о том, что упреждающие плавные движения глаз в ответ на наклонную линию, движущуюся по горизонтали, могут быть вызваны ожиданиями относительно ожидаемого направления движения объекта (т.е., 2D горизонтальное движение), а не ожиданиями относительно направления более примитивных одномерных сигналов движения края, ортогональных ориентации линии. Хотя кратковременные реакции на одномерные сигналы движения можно было увидеть на ранних этапах вертикального компонента преследования (см. Также Masson & Stone, 2002), эти вертикальные движения были невосприимчивы к упреждающим эффектам. Настоящее исследование исследовало, нужны ли представления ожидаемого движения объекта для генерировать упреждающие плавные движения глаз. Мы устранили представления ожидаемого движения объекта, используя цели, которые не передавали восприятие объекта, движущегося в пространстве.Цели представляли собой кинематограммы со случайными точками (RDK), состоящие из движущихся элементов с ограниченным сроком службы, которые постоянно исчезали и появлялись в новых местах. RDK, созданные с помощью точек с ограниченным сроком службы, генерируют глобальные сигналы движения, но не поддерживают представления движения дискретных объектов в пространстве, поскольку невозможно выбрать и отслеживать элемент или набор элементов дольше, чем их краткий срок службы. Дошер, Лэнди и Сперлинг (1989) изучали трехмерное восприятие формы из движения, используя паттерны с точками с ограниченным сроком службы по тем же причинам, а именно, чтобы удалить локальные сигналы движения отдельных элементов.Они обнаружили, что на восприятие трехмерной формы не влияет короткое время жизни элементов в узорах.
Этот вывод был основан на их выводах о том, что упреждающие плавные движения глаз в ответ на наклонную линию, движущуюся по горизонтали, могут быть вызваны ожиданиями относительно ожидаемого направления движения объекта (т.е., 2D горизонтальное движение), а не ожиданиями относительно направления более примитивных одномерных сигналов движения края, ортогональных ориентации линии. Хотя кратковременные реакции на одномерные сигналы движения можно было увидеть на ранних этапах вертикального компонента преследования (см. Также Masson & Stone, 2002), эти вертикальные движения были невосприимчивы к упреждающим эффектам. Настоящее исследование исследовало, нужны ли представления ожидаемого движения объекта для генерировать упреждающие плавные движения глаз. Мы устранили представления ожидаемого движения объекта, используя цели, которые не передавали восприятие объекта, движущегося в пространстве.Цели представляли собой кинематограммы со случайными точками (RDK), состоящие из движущихся элементов с ограниченным сроком службы, которые постоянно исчезали и появлялись в новых местах. RDK, созданные с помощью точек с ограниченным сроком службы, генерируют глобальные сигналы движения, но не поддерживают представления движения дискретных объектов в пространстве, поскольку невозможно выбрать и отслеживать элемент или набор элементов дольше, чем их краткий срок службы. Дошер, Лэнди и Сперлинг (1989) изучали трехмерное восприятие формы из движения, используя паттерны с точками с ограниченным сроком службы по тем же причинам, а именно, чтобы удалить локальные сигналы движения отдельных элементов.Они обнаружили, что на восприятие трехмерной формы не влияет короткое время жизни элементов в узорах.
RDK отличаются от обычных движущихся объектов и другими способами. Иллюзорные стационарные границы создаются в областях шаблона, где изменяется траектория движения, и невозможно плавно следовать за локальными движениями точек через статическую границу, показывая, что глобальное движение преобладает над движением локальных точек. Границы, определяемые движением, важны для определения контуров форм (Regan, 2000), подразумевая, что системы, которые анализируют глобальное движение RDK, могут быть больше озабочены поддержкой перцепционной сегментации и восприятия формы, чем созданием представлений о движении объектов в пространстве. это может иметь решающее значение для преследования.
это может иметь решающее значение для преследования.
Предыдущие исследования изучали поиск RDK с неограниченным (Heinen & Watamaniuk, 1998; Osborne & Lisberger, 2009; Schütz, Braun, & Gegenfurtner, 2009) или ограниченным сроком службы (Debono, Schütz, Spering, & Gegenfurtner, 2010; Krauzlis & Adler, 2001; Schraa-Tam et al., 2009; Schütz, Braun, Movshon, & Gegenfurtner, 2010), хотя ни одно из этих предыдущих исследований не включало опережающих плавных движений глаз. Хайнен и Ватаманюк (1998), например, обнаружили, что выгода от погони за кинематограммами с неограниченным сроком службы увеличивается с увеличением размера поля, показывая, что система преследования способна интегрировать сигналы движения в пространстве.Используя RDK с ограниченным сроком службы с различными уровнями когерентности (т. Е. С изменяющимся соотношением движения сигнал / шум), Краузлис и Адлер (2001) обнаружили, что и направление преследования, и воспринимаемое движение могут быть сопоставимыми смещенными путями раскрытия сигналов. вероятное направление глобального движения. Эти эффекты на преследование могли быть связаны с ожиданиями или, альтернативно, могли быть вызваны вариациями силы избирательного внимания к сигнальным точкам. Schütz et al. (2010) обнаружили, что поиск RDK с точками с ограниченным сроком службы зависит от доли когерентно движущихся точек, а также от способности отдельно следить за сигнальными точками в шаблоне.
вероятное направление глобального движения. Эти эффекты на преследование могли быть связаны с ожиданиями или, альтернативно, могли быть вызваны вариациями силы избирательного внимания к сигнальным точкам. Schütz et al. (2010) обнаружили, что поиск RDK с точками с ограниченным сроком службы зависит от доли когерентно движущихся точек, а также от способности отдельно следить за сигнальными точками в шаблоне.
В этом исследовании было проведено три эксперимента, и во всех изучались упреждающие плавные движения глаз в ответ на ожидания относительно направления будущего движения RDK для RDK, состоящих из элементов с ограниченным сроком службы. Во всех экспериментах направление будущего движения РДК обнаруживалось символическими репликами. В эксперименте 1 перед началом движения RDK исследовали упреждающие плавные движения глаз. В эксперименте 2 перед изменением направления движения RDK исследовали упреждающие плавные движения глаз.В обоих экспериментах 1 и 2 были протестированы разные значения времени жизни точек, чтобы установить общность эффектов. Паттерны RDK с неограниченным временем жизни также были включены в качестве элементов управления, поскольку такие паттерны поддерживают представление движения дискретных объектов, то есть можно выбирать и отслеживать устойчивое движение одной или нескольких точек. В эксперименте 3 также использовались шаблоны с элементами ограниченного срока службы, а также использовались символические подсказки, чтобы раскрыть направление предстоящего движения.Эксперимент 3 отличался от двух предыдущих экспериментов тем, что его основной целью было исследование эффектов времени жизни точки и сигналов, указывающих на время жизни точки.
Паттерны RDK с неограниченным временем жизни также были включены в качестве элементов управления, поскольку такие паттерны поддерживают представление движения дискретных объектов, то есть можно выбирать и отслеживать устойчивое движение одной или нескольких точек. В эксперименте 3 также использовались шаблоны с элементами ограниченного срока службы, а также использовались символические подсказки, чтобы раскрыть направление предстоящего движения.Эксперимент 3 отличался от двух предыдущих экспериментов тем, что его основной целью было исследование эффектов времени жизни точки и сигналов, указывающих на время жизни точки.
Эксперимент 1: Прогнозируемые плавные движения глаз до начала движения RDK
Методы
Субъекты
Участвовали восемь субъектов, все с нормальным зрением, наивные для цели эксперимента, и ни один из них не имел предыдущего опыта в исследованиях плавное преследование. Протокол исследования был одобрен IRB Университета Рутгерса и соответствует Хельсинкской декларации.
Stimuli
RDK с коротким сроком службы отображались на ЭЛТ-мониторе Dell P793 (Dell Corporation, Round Rock, TX) (13 ° × 12 °; расстояние просмотра 115 см, 1,46 пикселя / мин дуга; частота обновления 75 Гц, без чересстрочной развертки ). Девять сотен маленьких белых квадратов (87 кд / м 2 , размер 4 ′ × 4 ′) когерентно перемещались в квадратной области 9,9 ° × 9,9 ° (9 точек / градус 2 ) на черном фоне. Скорость данной точки составляла 150 мин дуги / с. Направление движения (вверх, вниз, влево или вправо) было одинаковым для всех точек и выбиралось случайным образом перед каждым испытанием.
Было два основных условия. В состоянии направления движения крестик фиксации был смещен на 2 ° от центра в направлении, противоположном будущему направлению движения (вверх, вниз, вправо или влево). Таким образом, смещение служило сигналом, указывающим направление будущего движения (см. Krauzlis & Adler, 2001 для использования сопоставимого сигнала). В состоянии без привязки фиксирующий крест всегда находился в центре. Испытания с указанием и без сопровождения проводились в отдельных экспериментальных сессиях из 50 проб (верхняя панель).
Испытания с указанием и без сопровождения проводились в отдельных экспериментальных сессиях из 50 проб (верхняя панель).
Примеры дисплеев. Вверху: Эксперимент 1 с движением с указанием (слева) и без привязки (справа). После нажатия кнопки крестик фиксации исчез и появилось поле статических точек в течение 500 мс. Затем началось точечное движение продолжительностью 1,5 с в одном из четырех основных направлений. Для движения по команде крест фиксации был противоположен направлению будущего движения. Внизу: эксперимент 2, с указанием направления (справа) и без привязки (слева). Точка в первом поле сместилась вниз на 1 с, а затем изменила направление на вниз-влево или вниз-вправо.В состоянии посылки звуковой сигнал указывал направление за 500 мс до изменения направления.
Время жизни точки определяется как время, в течение которого данная точка остается на экране, прежде чем она будет перемещена в новое случайное место внутри области отображения. Были протестированы три различных кратких срока службы: 4 (52 мс), 8 (104 мс) или 16 кадров (208 мс). Эти времена жизни были достаточно короткими, так что постоянное преследование избранных местных элементов было бы невозможным (Kowler & McKee, 1987). Также были протестированы дисплеи с точками с неограниченным сроком службы.Уменьшение срока службы точки также внесло шум в сигнал движения (подробности см. В Приложении A).
Эти времена жизни были достаточно короткими, так что постоянное преследование избранных местных элементов было бы невозможным (Kowler & McKee, 1987). Также были протестированы дисплеи с точками с неограниченным сроком службы.Уменьшение срока службы точки также внесло шум в сигнал движения (подробности см. В Приложении A).
Время жизни выбиралось случайным образом перед каждым испытанием. Чтобы гарантировать, что все точки с ограниченным сроком службы не исчезнут сразу на одном кадре, начальный возраст каждой точки выбирался случайным образом из значений в диапазоне от одного кадра до максимального срока службы для этого испытания.
Процедура
Испытуемые фиксировали неподвижный крест и начинали испытание нажатием кнопки, когда были готовы.Затем крест был заменен полем статических точек на 500 мс. Затем движение начиналось либо на 1,5 с (условие направления без привязки), либо на 2,0 с (условие направления с указанием). Испытуемые были проинструктированы обращать внимание на движение точек и не пытаться использовать саккады, чтобы догнать движущиеся случайные точки, если он или она чувствовали, что преследование отстает.
Чтобы проверить возможность того, что смещение фиксирующего креста само по себе может вызвать смещение к центру изображения (в направлении ожидаемого движения) в состоянии с указанием, блоки испытаний были запущены с тем же стимулом, который использовался в состоянии с указанием. за исключением того, что все точки оставались неподвижными, поэтому движения не ожидалось.В этих условиях систематических дрейфов к центру не обнаружено.
Регистрация движения глаза
Горизонтальные и вертикальные движения правого глаза регистрировались с использованием системы отслеживания изображений Пуркинье поколения IV (Fourward Technologies, Галлатин, Миссури) (Crane & Steele, 1978). Левый глаз был прикрыт, а голова поддерживалась опорой для подбородка. Выходное напряжение трекера подавалось через фильтр нижних частот 100 Гц на 12-битный аналого-цифровой преобразователь (АЦП). АЦП, управляемый ПК, измерял положение глаза каждые 2 мс.Оцифрованные напряжения сохранялись для анализа. Изменения в модели движения на экране (начала, смещения и изменения направления) регистрировались по появлению и смещению небольшого белого квадрата, отображаемого вне поля зрения субъекта. Белый квадрат контролировался фотоэлементом, выходной сигнал которого подавался на канал АЦП и регистрировался вместе с положением глаз, чтобы гарантировать точную временную синхронизацию между анализом критических изменений в отображении стимула и движениями глаз.
Изменения в модели движения на экране (начала, смещения и изменения направления) регистрировались по появлению и смещению небольшого белого квадрата, отображаемого вне поля зрения субъекта. Белый квадрат контролировался фотоэлементом, выходной сигнал которого подавался на канал АЦП и регистрировался вместе с положением глаз, чтобы гарантировать точную временную синхронизацию между анализом критических изменений в отображении стимула и движениями глаз.
Уровень шума трекера был измерен с помощью искусственного глаза после того, как трекер был настроен так, чтобы отражения первого и четвертого изображения были такими же, как у среднего глаза человека. Частота фильтрации и выборки были такими же, как и в эксперименте. Уровень шума, выраженный как стандартное отклонение отсчетов местоположения, составлял 0,40 для горизонтального и 0,70 для вертикального положения. Записи производились с отключенным автоматически подвижным оптическим столиком трекера (auto-stage) и с отключенным сервоприводом фокусировки во время испытаний (Gersch, Kowler, & Dosher, 2004).
Экспериментальные сессии и количество протестированных испытаний
Каждая экспериментальная сессия длилась 50 испытаний (испытания с указанием последовательности продолжались 2,5 с, а испытания без привязки — 2,0 с). Субъекты были протестированы в 6–13 сеансах в условном режиме и в 8–13 сеансах в условиях «без привязки».
Анализ данных
Горизонтальная и вертикальная скорости рассчитывались по положению глаз. Каждый отсчет скорости представляет собой наклон линии регрессии из 25 отсчетов положения, разделенных 2 мс в скользящем окне 50 мс.Образцы, содержащие саккады или части саккад, были удалены. Начальное и конечное положения саккад были обнаружены в автономном режиме с помощью компьютерного алгоритма, использующего критерий ускорения для определения начала саккады и скорости для определения смещения саккады. Ускорение вычислялось как разница в скорости между двумя образцами (длительность 14 мс) с началом, разделенным 2 мс. Величина критерия (разница скоростей 20–40 ‘/ с) была определена эмпирически для отдельных наблюдателей путем изучения большой выборки аналоговых записей положения глаз.
Обычные алгоритмы для оценки латентности преследования в ответ на начало движения цели (например, Carl & Gellman, 1987; Krauzlis & Miles, 1996) не были полезны для настоящего эксперимента из-за упреждающих реакций. Таким образом, характеристики будут описаны в отношении времени начала движения цели.
Результаты
Примеры плавного поиска RDK с двумя из протестированных ограниченных сроков службы (52 и 208 мс) показаны на. Прогнозируемые плавные движения глаз в указанном направлении можно увидеть до начала движения цели.Преследование достигло скоростей, близких к целевой скорости, в течение обоих показанных сроков жизни, но со временем заметно замедлилось с более короткими точками жизни.
Эксперимент 1. Репрезентативные горизонтальные движения глаз во времени ERC субъекта (толстые черные линии), когда направление движения было задано для двух из значений времени жизни точки: 52 мс (вверху) и 208 мс (внизу). Тонкая (серая) линия показывает горизонтальное движение цели. Время 0 — это начало движения цели.
Время 0 — это начало движения цели.
Движения глаз анализировали путем вычисления скорости в течение 50 мс выборок (начала, разделенных 2 мс; см. Методы) и усреднения ответов по испытаниям.показывает пример средней скорости глаза (± 1 SD ) с течением времени как с неограниченным, так и с коротким (52 мс) временем жизни. Прогнозируемые плавные движения глаз в направлении ожидаемого движения цели можно было увидеть до начала движения цели, когда было задано направление движения. Кроме того, скорость преследования (пиковая и установившаяся) была ниже в связи с меньшим сроком службы. Ожидается более медленная установившаяся скорость преследования с более коротким временем жизни точек, поскольку сигнал движения становится более шумным по мере того, как время жизни точек уменьшается (см. Приложение A).
Эксперимент 1: Примеры средних горизонтальных скоростей глаз (выборки 50 мс, с началом последовательных выборок, разделенных 2 мс) с течением времени для отслеживаемого LM объекта (слева) и без привязки (справа) движения цели с неограниченным (вверху) или 52 мс ( внизу) время жизни точки. Заштрихованные области представляют ± 1 SD . Пунктирная линия представляет горизонтальную скорость стимула. Каждая функция средней скорости была средним значением приблизительно 30 испытаний.
Заштрихованные области представляют ± 1 SD . Пунктирная линия представляет горизонтальную скорость стимула. Каждая функция средней скорости была средним значением приблизительно 30 испытаний.
Прогнозируемые плавные движения глаз также можно увидеть, сравнив ответы в зависимости от направления, на которое была подана команда.(левый столбец) показывает средние горизонтальные скорости глаз с течением времени для 3 репрезентативных субъектов (AS, ERC и SS), когда сигналы указывали, что движение будет либо вправо (верхний кластер следов на каждом графике), либо влево (нижний кластер из следы). Отдельные кривые, содержащиеся в каждом из кластеров, показывают отклики для разных времен жизни точек. Кластер графиков, представляющих скорости глаз в ответ на разные направления указателей (правое и левое), начал разделяться до начала движения цели.Разделение ответов на разные направления подсказок предполагает, что реплики были эффективны в создании упреждающих плавных движений глаз. Напротив, когда направление движения не было заранее задано (, правый столбец), разделение следов на две группы (одна для движения цели вправо и одна для движения влево) не было очевидным до начала движения цели. . Результаты были одинаковыми для всех испытуемых, а также для вертикальных скоростей глаз, когда указанное направление движения было либо вниз, либо вверх (рисунки с S1 по S4).
Напротив, когда направление движения не было заранее задано (, правый столбец), разделение следов на две группы (одна для движения цели вправо и одна для движения влево) не было очевидным до начала движения цели. . Результаты были одинаковыми для всех испытуемых, а также для вертикальных скоростей глаз, когда указанное направление движения было либо вниз, либо вверх (рисунки с S1 по S4).
Эксперимент 1: средние горизонтальные скорости глаз (выборки 50 мс, с началом последовательных выборок, разделенных 2 мс) как функция времени, когда направление было указано (слева) или не указано (справа) для трех репрезентативных субъектов. Пунктирная линия показывает скорость цели, с началом движения цели в момент времени 0. Скорости глаз показаны в ответ на движения цели вправо (верхний кластер функций на каждом графике) и влево (нижний кластер функций на каждом графике), при этом разные строки, показывающие результаты для разных сроков службы (см. легенду).Положительные значения соответствуют движению вправо. Каждое среднее значение было средним для примерно 30 испытаний.
Каждое среднее значение было средним для примерно 30 испытаний.
Краткое изложение доказательств, подтверждающих наличие упреждающих плавных движений глаз у всех субъектов. Верхний график показывает распределения средних горизонтальных скоростей глаз (выборки 50 мс), полученные в начале движения цели, когда указанное направление движения цели было влево или вправо, а нижний график показывает распределения средних вертикальных скоростей глаз, снятых при начало движения цели, когда указанное направление движения цели было вверх или вниз (нижний график).Каждая запись в распределении представляет собой среднюю скорость глаз для разных субъектов, при этом данные для каждого субъекта объединены за все времена жизни. не показывает перекрытия между ожидаемыми скоростями глаз в ответ на разные направления указателя (либо влево против правого, либо вверх против вниз). показаны результаты тестов t , проведенных для сравнения распределений скоростей глаз (средние значения которых указаны), полученных для каждого объекта и каждого направления, на которое указывает указатель. Результаты тестов t показывают, что различия в распределении скоростей глаз в ответ на реплики были очень значимыми, со всеми, кроме одного p -значение ( p = 10 −6 ) меньше 10 −13 .
Результаты тестов t показывают, что различия в распределении скоростей глаз в ответ на реплики были очень значимыми, со всеми, кроме одного p -значение ( p = 10 −6 ) меньше 10 −13 .
Средняя скорость глаз (50 мс) в момент начала движения цели. Вверху: горизонтальные средние скорости глаз, когда сигнал указывал, что будущее движение будет влево ( n = 8 субъектов) или вправо ( n = 8 субъектов). Внизу: средняя скорость глаз по вертикали, когда сигнал указывал, что в будущем движение будет восходящим ( n = 8 субъектов) или вниз ( n = 8 субъектов). Данные объединяются за время жизни.
Таблица 1
Эксперимент 1: Результаты тестов t , сравнивающих распределения средней скорости глаз в начале движения для различных направлений. Примечания : Тесты t были основаны на средних горизонтальных (левый столбец) или вертикальных (правый столбец) скоростях глаз, выборках 50 мс в начале движения цели, объединенных за время жизни (средние скорости глаз указаны). Визуальные подсказки сигнализировали, будет ли направление движения левым или правым (левый столбец) или вверх-вниз (правый столбец).
Визуальные подсказки сигнализировали, будет ли направление движения левым или правым (левый столбец) или вверх-вниз (правый столбец).
| Субъект | Cue: левый против правого, t ( df ), p | Реплика: вверх vs.вниз, t ( df ), p |
| AS | 18 (219), ∼10 −46 | 11 (209), ∼0 |
| EC | 11 (184), ∼0 | 9.0 (209), ∼10 −16 |
| LM | 14 (292), ∼0 | 14 (303), ∼0 |
| MP | 5. 9 (147), ∼10 −8 9 (147), ∼10 −8 | 8.1 (145), ∼10 −13 |
| МВт | 8.0 (254), ∼10 −14 | 8,1 (281), ∼10 −14 |
| RP | 5,8 (260), ∼10 −8 | 8,6 (278), ∼ 10 −16 |
| SS | 5,8 (196), ∼10 −8 | 5,0 (185), ∼10 −6 |
| VK | 9,8 (299), ∼0 | 9,0 (265), ∼0 |
Исследование кривых средней скорости глаза (и рисунки S1 – S4) указывает на дополнительную характеристику реакции преследования.Цифры показывают, что различия в преследовании в зависимости от времени жизни точки, по-видимому, проявились довольно долго. Различия в среднем отклике в зависимости от продолжительности жизни, как ожидается, в конечном итоге возникнут, поскольку в реакции преследования начинает преобладать фактический, а не ожидаемый сигнал. В частности, преследование должно быть более медленным для моделей стимула с более коротким временем жизни, потому что сигнал скорости цели более шумный (см. Приложение A; Schütz et al., 2010). Однако изучение кривых средней скорости глаза на рисунках с S1 по S4 позволяет предположить, что различия между реакциями на разные времена жизни точки могли не проявиться до тех пор, пока скорость глаза не достигла значений, равных или близких к скорости цели.Этот вывод напоминает более ранние результаты, показавшие, что влияние скорости цели на преследование проявляется после относительно длительных задержек, когда скорость непредсказуема и не контролируется (Kowler & McKee, 1987; Rasche & Gegenfurtner, 2009).
Различия в среднем отклике в зависимости от продолжительности жизни, как ожидается, в конечном итоге возникнут, поскольку в реакции преследования начинает преобладать фактический, а не ожидаемый сигнал. В частности, преследование должно быть более медленным для моделей стимула с более коротким временем жизни, потому что сигнал скорости цели более шумный (см. Приложение A; Schütz et al., 2010). Однако изучение кривых средней скорости глаза на рисунках с S1 по S4 позволяет предположить, что различия между реакциями на разные времена жизни точки могли не проявиться до тех пор, пока скорость глаза не достигла значений, равных или близких к скорости цели.Этот вывод напоминает более ранние результаты, показавшие, что влияние скорости цели на преследование проявляется после относительно длительных задержек, когда скорость непредсказуема и не контролируется (Kowler & McKee, 1987; Rasche & Gegenfurtner, 2009).
Статистический анализ (односторонний дисперсионный анализ, где время жизни было фактором) был проведен на скоростях глаз для каждого субъекта, условиях поиска и направлении движения. Различия между сроками службы стали значительными ( p <0,001) в среднем через 204 мс после начала движения цели ( SD = 68, N = 56; отдельные значения см. В таблице S1).Один субъект (SS) не был включен в это среднее значение, потому что SS либо не проявлял эффектов продолжительности жизни во время испытания, либо не проявлял эффектов продолжительности жизни, по крайней мере, через 1,5 с после начала движения.
Различия между сроками службы стали значительными ( p <0,001) в среднем через 204 мс после начала движения цели ( SD = 68, N = 56; отдельные значения см. В таблице S1).Один субъект (SS) не был включен в это среднее значение, потому что SS либо не проявлял эффектов продолжительности жизни во время испытания, либо не проявлял эффектов продолжительности жизни, по крайней мере, через 1,5 с после начала движения.
Эффекты ожиданий относительно непредсказуемых свойств стимула, таких как время жизни точки, часто можно продемонстрировать путем поиска доказательств последовательных зависимостей, в которых реакция зависит от стимула, имевшего место в непосредственно предшествующем испытании (Barnes & Collins, 2008). ; Kowler, 1989; Kowler et al., 1984; Люс, 1986; Янг и Лисбергер, 2010). Мы искали доказательства последовательных зависимостей для эффектов продолжительности жизни, исследуя производительность как функцию продолжительности жизни в непосредственно предшествующем испытании. Мы не обнаружили последовательных зависимостей, то есть производительность не различалась в зависимости от срока службы в предыдущем испытании (см. Репрезентативный пример от одного испытуемого в). Возможно, последовательные зависимости не были обнаружены, потому что прошло слишком много времени между началом движения в последовательных испытаниях (0.5 с интервал перед движением + 2 с движения + время между испытаниями). Известно, что последовательные зависимости времени реакции уменьшаются в зависимости от времени, прошедшего между испытаниями (Luce, 1986). Последовательные зависимости из-за времени жизни точки будут повторно исследованы в эксперименте 3 с использованием дисплеев с более короткими временными интервалами между последовательными RDK.
Мы не обнаружили последовательных зависимостей, то есть производительность не различалась в зависимости от срока службы в предыдущем испытании (см. Репрезентативный пример от одного испытуемого в). Возможно, последовательные зависимости не были обнаружены, потому что прошло слишком много времени между началом движения в последовательных испытаниях (0.5 с интервал перед движением + 2 с движения + время между испытаниями). Известно, что последовательные зависимости времени реакции уменьшаются в зависимости от времени, прошедшего между испытаниями (Luce, 1986). Последовательные зависимости из-за времени жизни точки будут повторно исследованы в эксперименте 3 с использованием дисплеев с более короткими временными интервалами между последовательными RDK.
Эксперимент 1: Влияние продолжительности жизни в предыдущем испытании. Средние горизонтальные скорости глаз (выборки 50 мс, с началом последовательных выборок, разделенных 2 мс) как функция времени в условном сигнале для LM субъекта. Пунктирная линия показывает скорость движения цели с началом движения в момент времени 0. Скорости глаз отображаются в ответ на движения цели вправо (верхний кластер функций) и влево (нижний кластер функций), а разные линии показывают результаты. для разных сроков службы в предыдущем испытании (см. легенду). Положительные значения соответствуют движению вправо. Каждое среднее значение было средним для примерно 30 испытаний.
Пунктирная линия показывает скорость движения цели с началом движения в момент времени 0. Скорости глаз отображаются в ответ на движения цели вправо (верхний кластер функций) и влево (нижний кластер функций), а разные линии показывают результаты. для разных сроков службы в предыдущем испытании (см. легенду). Положительные значения соответствуют движению вправо. Каждое среднее значение было средним для примерно 30 испытаний.
Обсуждение
Прогнозируемые плавные движения глаз могут быть сгенерированы в ответ на ожидания относительно направления глобального движения случайных точечных кинематограмм.Изображение объекта, движущегося на фоне, не требуется для создания упреждающих плавных движений глаз. Кроме того, влияние времени жизни точки на преследование проявляется поздно, обычно близко к тому моменту, когда преследование достигает пиковых или установившихся значений.
Эксперимент 2: ожидаемые плавные движения глаз до изменения направления RDK
В эксперименте 1 образцы RDK были стационарными, когда генерировались упреждающие плавные движения глаз. В эксперименте 2 изучались упреждающие плавные движения глаз перед ожидаемым изменением направления RDK, когда преследование уже началось.RDK начинались с движения вниз, после чего движение всего паттерна меняло направление на вниз-влево или вниз-вправо через 0,5 с после того, как слуховой сигнал указывал направление изменения движения.
В эксперименте 2 изучались упреждающие плавные движения глаз перед ожидаемым изменением направления RDK, когда преследование уже началось.RDK начинались с движения вниз, после чего движение всего паттерна меняло направление на вниз-влево или вниз-вправо через 0,5 с после того, как слуховой сигнал указывал направление изменения движения.
Методы
Стимулы и процедуры были такими же, как в эксперименте 1, за следующими исключениями (см.). Перед началом испытания крестик фиксации располагался на 2 ° выше центра экрана и исчезал после того, как испытуемый нажал кнопку запуска испытания. Затем появилось поле из точек, которое начало двигаться вниз со скоростью 150 ′ / с за 1.5 с, при этом направление движения изменилось на вниз-вправо или вниз-влево еще на 1,5 с. Скорость горизонтальной составляющей движения составляла 106 ′ / с. В состоянии указания направления звуковой сигнал (короткий тон, длительностью 150 мс) воспроизводился через один из двух соналтов и подавался за 0,5 с до изменения направления движения. Частота тона и местоположение (справа или слева от объекта) сигнализировали о направлении, в котором будет двигаться цель. Субъектам рассказывали и просили обратить внимание на реплики.Не было никакого тонального сигнала в состоянии безотказного направления.
Частота тона и местоположение (справа или слева от объекта) сигнализировали о направлении, в котором будет двигаться цель. Субъектам рассказывали и просили обратить внимание на реплики.Не было никакого тонального сигнала в состоянии безотказного направления.
Пять субъектов, участвовавших в эксперименте 1 (AS, ERC, MW, MP и SS), были протестированы в эксперименте 2. В условиях заданного направления движения субъекты провели 11–14 экспериментальных сессий (50 испытаний за сессию). . В незадействованном состоянии они провели 9–14 сеансов. Субъекты MP и SS были протестированы в этом эксперименте перед запуском в Эксперимент 1.
Результаты
Средние скорости глаз с течением времени, когда направление было либо указано (левые графики), либо не указано (правые графики), показаны для тех же трех субъектов, чьи результаты для эксперимента 1 показаны на.(Результаты всех пяти испытуемых представлены на рисунках S5 и S6). Изучение разделения между трассами средней скорости глаз до ожидаемого движения цели влево и вправо предполагает, что упреждающие плавные движения глаз присутствовали для двух из изображенных субъектов (AS и ERC), но не для третьего (SS).
Эксперимент 2: средние горизонтальные скорости глаз (выборки 50 мс, с началом последовательных выборок, разделенных 2 мс) в зависимости от времени в условных обозначениях (слева) и без привязки (справа) для трех субъектов.Пунктирная линия показывает скорость движения цели с началом горизонтальной составляющей движения в момент времени 0. Скорости глаз показаны в ответ на движения цели вправо (верхний кластер функций) и влево (нижний кластер функций), при этом разные строки, показывающие результаты для разных сроков службы (см. легенду). Положительные значения соответствуют движению вправо. Каждое среднее значение было средним для примерно 75 испытаний.
Чтобы определить, присутствуют ли упреждающие плавные движения глаз, был проведен тот же анализ, что и в эксперименте 1.В частности, распределения горизонтальных скоростей глаз, полученные во время изменения направления, сравнивались для двух разных направлений (правое и левое). показывает среднюю скорость глаз во время изменения направления вместе с результатами тестов t , сравнивающих эти распределения для всех 5 субъектов. Данные для каждого субъекта были объединены по трем шаблонам ограниченной продолжительности жизни (52, 104 и 208 мс). Различия между скоростями глаз в разных направлениях были обнаружены для трех из пяти субъектов (AS и ERC; MP, рисунок S5), и различия были очень значимыми (0 < p <10 −10 ).Это указывает на возникновение упреждающих плавных движений глаз. Остальные два субъекта (SS1; MW, рис. S6) не показали значительных различий между скоростями глаз для двух направлений (хотя различия в средних значениях были в ожидаемом направлении). Таким образом, трое из пяти испытуемых показали сильные упреждающие плавные движения глаз, в то время как двое других не показали упреждающих плавных движений глаз.
Данные для каждого субъекта были объединены по трем шаблонам ограниченной продолжительности жизни (52, 104 и 208 мс). Различия между скоростями глаз в разных направлениях были обнаружены для трех из пяти субъектов (AS и ERC; MP, рисунок S5), и различия были очень значимыми (0 < p <10 −10 ).Это указывает на возникновение упреждающих плавных движений глаз. Остальные два субъекта (SS1; MW, рис. S6) не показали значительных различий между скоростями глаз для двух направлений (хотя различия в средних значениях были в ожидаемом направлении). Таким образом, трое из пяти испытуемых показали сильные упреждающие плавные движения глаз, в то время как двое других не показали упреждающих плавных движений глаз.
Таблица 2
Эксперимент 2, указанное направление: средняя скорость глаз и результаты тестов t во время изменения направления. Примечания : Горизонтальные средние скорости глаз, выборки 50 мс, при изменении направления движения цели, объединенные за время жизни 52, 104 и 208 мс. Отрицательные значения представляют собой скорости влево. Слуховые сигналы сигнализируют о направлении движения.
Отрицательные значения представляют собой скорости влево. Слуховые сигналы сигнализируют о направлении движения.
| Метка: левая | Метка: правая | т ( df ) | п. | |
| Среднее ( SD ), N | Среднее ( SD ), N | |||
| AS | −18.7 (43), 206 | 31,1 (43), 191 | 12 (395) | ∼0 |
| ERC | −28,6 (51), 199 | 31,0 (55), 193 | 11 ( 390) | ∼0 |
| MP | –1,9 (43), 262 | 21,9 (43), 294 | 6,4 (554) | 10 −10 |
| MW | −8,6 (49), 281 | -4,4 (47), 254 | 1,0 (533) | 0,31 |
| SS | 2. 2 (63), 224 2 (63), 224 | 8,8 (64), 278 | 1,1 (500) | 0,25 |
Мы также исследовали, когда возникали значительные различия между реакциями преследования на разное время жизни точек, как мы это делали в эксперименте. 1. Различия между временами жизни ( p <0,001) возникали в среднем через 153 мс ( SD = 120, n = 20) после изменения направления движения (см. Также). Эти средние значения были немного, но значительно раньше, чем значения (среднее = 204), полученные для эксперимента 1, t (23) = 1.78, p = 0,044.
Обсуждение
Результаты эксперимента 2 показали, что упреждающие плавные движения глаз могут происходить до ожидаемого изменения направления движения RDK. Ожидаемые плавные движения глаз были обнаружены у трех из пяти испытуемых. Двое, у которых не было упреждающих плавных движений глаз, показали их в эксперименте 1. Возможно, некоторые люди не могут производить упреждающие плавные движения глаз в ответ на ожидания относительно изменения направления RDK.С другой стороны, упреждающая реакция могла пострадать из-за недостаточной чувствительности к слуховым сигналам, которые представляли собой звуковые сигналы, подаваемые за 0,5 с до изменения направления движения. Это предположение правдоподобно, поскольку предыдущие исследования показали, что упреждающие плавные движения глаз более чувствительны к визуальным сигналам, встроенным в дисплей, чем к слуховым сигналам, касательным к дисплею (Kowler, 1989).
Возможно, некоторые люди не могут производить упреждающие плавные движения глаз в ответ на ожидания относительно изменения направления RDK.С другой стороны, упреждающая реакция могла пострадать из-за недостаточной чувствительности к слуховым сигналам, которые представляли собой звуковые сигналы, подаваемые за 0,5 с до изменения направления движения. Это предположение правдоподобно, поскольку предыдущие исследования показали, что упреждающие плавные движения глаз более чувствительны к визуальным сигналам, встроенным в дисплей, чем к слуховым сигналам, касательным к дисплею (Kowler, 1989).
Эффекты времени жизни точки проявились раньше в Эксперименте 2, чем в Эксперименте 1.Это согласуется с существованием эффектов ожиданий относительно времени жизни точки, потому что в эксперименте 2: (1) время жизни движения до изменения направления давало надежный сигнал к продолжительности жизни после изменения направления, и (2) время жизни Паттерны до и после смены направления движения цели были одинаковыми. Однако эти наблюдения о возможных эффектах ожиданий относительно продолжительности жизни на основе результатов экспериментов 1 и 2 являются лишь предварительными, потому что ни один эксперимент не был специально разработан для изучения эффектов значения ожидаемой продолжительности жизни.
Однако эти наблюдения о возможных эффектах ожиданий относительно продолжительности жизни на основе результатов экспериментов 1 и 2 являются лишь предварительными, потому что ни один эксперимент не был специально разработан для изучения эффектов значения ожидаемой продолжительности жизни.
Эксперимент 3 был проведен для изучения влияния ожиданий в отношении срока службы точки и использовал как начало движения (аналогично эксперименту 1), так и изменение направления (аналогично эксперименту 2) в схеме, которая позволила определить как эффекты прошлой истории, так и влияние эффекты визуальных сигналов к жизни.
Эксперимент 3: Ожидания относительно срока службы точки
В эксперименте 3 изучались эффекты сигналов о времени жизни точки, которые поступали либо до начала движения RDK (аналогично эксперименту 1), либо до изменения направления движения (аналогично эксперименту 2).
Чтобы сравнить роль сигналов о продолжительности жизни с ролью непосредственной прошлой истории, последовательно были показаны два последовательных RDK (продолжительность каждого = 1,5 с) с точками с ограниченным сроком службы. Для условия начала движения первый RDK был стационарным (то есть скорость точек с ограниченным сроком службы была установлена на ноль), и точки, казалось, мерцали, а не двигались. Для условия смены направления первый RDK двигался вниз со скоростью 150 ‘/ с. Второй РДК двигался либо вниз и влево, либо вниз и вправо (горизонтальная составляющая скорости = 106 ′ / с).
Для условия начала движения первый RDK был стационарным (то есть скорость точек с ограниченным сроком службы была установлена на ноль), и точки, казалось, мерцали, а не двигались. Для условия смены направления первый RDK двигался вниз со скоростью 150 ‘/ с. Второй РДК двигался либо вниз и влево, либо вниз и вправо (горизонтальная составляющая скорости = 106 ′ / с).
Первый RDK использовался для обеспечения времени жизни от метки до точки. Это было достигнуто путем установки времени жизни первого RDK либо на 4 кадра (52 мс), либо на 16 кадров (208 мс). Эти значения были достаточно далеко друг от друга, чтобы их можно было легко различить по видимому мерцанию точек, которое можно было увидеть в первом RDK независимо от того, был ли он неподвижным или движущимся.
Было три условия вызова: (1) cued-same: время жизни точек в двух RDK было одинаковым на протяжении блока из 50 испытаний; (2) cued-different: время жизни точек в двух RDK различается на протяжении блока из 50 испытаний; и (3) uncued: время жизни точек в каждом RDK было выбрано случайным образом и независимо. Перед каждым сеансом из 50 испытаний испытуемым сообщали, какое условие определения сигнала проверялось. Испытания начала движения и изменения направления случайным образом чередовались в одной и той же экспериментальной сессии.
Перед каждым сеансом из 50 испытаний испытуемым сообщали, какое условие определения сигнала проверялось. Испытания начала движения и изменения направления случайным образом чередовались в одной и той же экспериментальной сессии.
Анализы были сосредоточены на эффектах первого RDK после того, как продолжалась погоня за вторым RDK. Если первый RDK действует как эффективный сигнал к продолжительности жизни (как это могло быть в эксперименте 2), мы ожидаем увидеть более высокие скорости глаз, когда сигнал указывает на то, что более продолжительное время жизни будет присутствовать во втором RDK в обоих одинаковых и cued — разные условия, но не в состоянии uncued.С другой стороны, если эффекты продолжительности жизни переходят от одной модели движения к другой, мы ожидаем увидеть более высокие скорости глаз, когда первый RDK будет иметь наибольшее время жизни во всех трех условиях отслеживания.
Направление движения второго RDK (вниз-вправо или вниз-влево) также определялось с помощью той же техники, которая была эффективна в Эксперименте 1, а именно смещения горизонтального положения креста начальной фиксации в направлении, противоположном направлению. будущее направление горизонтального движения.
будущее направление горизонтального движения.
Три новых объекта были протестированы в 13–17 экспериментальных сессиях для каждого условия привязки. Испытуемые были наивны по отношению к цели экспериментов, и ни один из них раньше не проводил эксперименты по преследованию.
Результаты и обсуждение
Главный результат эксперимента 3 заключался в том, что поиск второго RDK шел быстрее, когда первый RDK имел более длительный срок службы. Это было обнаружено во всех трех условиях поиска. Влияние первого RDK наблюдалось независимо от того, двигался ли первый RDK (условие изменения направления) или неподвижно с мерцающими точками (условие начала движения).
иллюстрирует влияние первого RDK на преследование второго RDK для 1 субъекта. На четырех графиках показаны результаты условия начала движения (слева) и условия изменения направления (справа), когда время жизни второго RDK было указано первым RDK (нижние графики) или не было указано первым RDK (верхнее графики). В каждом из четырех графиков время жизни второго RDK составляло 208 мс. Время жизни первого RDK составляло 52 мс (красные линии) или 208 мс (зеленые линии). Таким образом, для условия с указанием (нижние графики) зеленая линия представляет результаты такого же условия с указанием, а красная линия представляет результаты условия с указанием другого.
В каждом из четырех графиков время жизни второго RDK составляло 208 мс. Время жизни первого RDK составляло 52 мс (красные линии) или 208 мс (зеленые линии). Таким образом, для условия с указанием (нижние графики) зеленая линия представляет результаты такого же условия с указанием, а красная линия представляет результаты условия с указанием другого.
Эксперимент 3: средние горизонтальные скорости глаз (выборки 50 мс, с началом последовательных выборок, разделенных 2 мс) как функция времени, когда время жизни первого RDK было либо 52 мс (красный), либо 208 мс (зеленый). Время жизни второго РДК всегда составляло 208 мс. Срок службы второго RDK был либо подан (внизу), либо нет (вверху) в состоянии начала движения (слева) или изменения направления (справа). Пунктирная линия показывает скорость движения цели. Положительные значения соответствуют движению вправо.Данные взяты из субъекта AT. Каждое среднее значение было средним для примерно 35 испытаний.
На каждом графике скорость глаза примерно на 100–200 мс после начала движения цели была выше, когда время жизни первого RDK было более длительным из двух возможных значений. Этот образец результатов свидетельствует о том, что эффекты времени жизни точки переносятся от одного RDK к другому, независимо от условия обнаружения. Картина результатов для других 2 субъектов была такой же (рисунки S7 и S8).
Этот образец результатов свидетельствует о том, что эффекты времени жизни точки переносятся от одного RDK к другому, независимо от условия обнаружения. Картина результатов для других 2 субъектов была такой же (рисунки S7 и S8).
Эффекты переноса были проверены путем изучения средних скоростей глаз для одной репрезентативной временной эпохи, через 200 мс после начала движения цели или после изменения направления движения цели, когда преследование продолжалось.показывает эти средние скорости глаз со средними значениями для субъектов как функцию времени жизни первого RDK.
Эксперимент 3: Средняя скорость глаза (± 1 SD ) через 200 мс после начала движения (слева) или через 200 мс после изменения направления движения (справа) как функция времени жизни точек во втором RDK, усредненная над предметами и направлениями движения. Время жизни второго RDK было определено (внизу) или нет (вверху) временем жизни первого RDK.
Скорость глаза была выше, когда срок службы первого RDK был больше, независимо от того, был ли первый RDK надежным индикатором срока службы (нижние графики) или ненадежным сигналом (верхние графики), независимо от того, был ли первый RDK был стационарным (левые графы) или подвижным (правые графы) и независимо от времени жизни второго RDK. Статистический анализ проводился с использованием линейной модели, описанной в Приложении B. Результаты, обобщенные в, показали, что различия между скоростями глаз в зависимости от срока службы первого RDK были значительными для всех восьми функций, показанных в. Влияние срока службы первого RDK было очень значительным в состоянии с подачей, t (4622) = 16,45, p <10 −15 , и в необработанном состоянии t (3671) = 14,08, . р <10 −15 .Кроме того, не было значительных различий в скорости глаз в зависимости от типа перехода между RDK (начало движения в зависимости от изменения направления), t (8295) = 0,783, p > 0,9 и не было значимого разница в зависимости от того, был ли срок службы указан или нет, t (8295) = 2,02, p = 0,52.
Статистический анализ проводился с использованием линейной модели, описанной в Приложении B. Результаты, обобщенные в, показали, что различия между скоростями глаз в зависимости от срока службы первого RDK были значительными для всех восьми функций, показанных в. Влияние срока службы первого RDK было очень значительным в состоянии с подачей, t (4622) = 16,45, p <10 −15 , и в необработанном состоянии t (3671) = 14,08, . р <10 −15 .Кроме того, не было значительных различий в скорости глаз в зависимости от типа перехода между RDK (начало движения в зависимости от изменения направления), t (8295) = 0,783, p > 0,9 и не было значимого разница в зависимости от того, был ли срок службы указан или нет, t (8295) = 2,02, p = 0,52.
Таблица 3
Эксперимент 3: Влияние срока службы первого RDK (52 мс против 208 мс). Примечания : Средние скорости (± SD ) показаны на. Значения p были скорректированы с использованием метода Бонферрони, чтобы отразить 12 различных проведенных тестов (восемь тестов показаны в; см. Текст, Результаты эксперимента 3, параграф 5 для четырех дополнительных тестов). Испытания проводились на основе линейной модели, описанной в Приложении Б.
| Состояние | t ( df ), p |
| Срок службы не указан | t (893) = 4,9 × 10 −10 |
| Изменение направления | |
| Срок службы второго RDK = 52 мс | |
| Срок службы не указан | т (893) = 2.1 × 10 −8 |
| Изменение направления | |
| Срок службы второго RDK = 208 мс | |
| Срок службы не указан | t (926) = 3,8 × 10 −7 |
| Начало движения | |
| Срок службы второго RDK = 52 мс | |
| Срок службы не указан | t (926) = 1,3 × 10 −10 |
| Начало движения | |
| Срок службы второго RDK = 208 мс | |
| Срок службы | т (1169) = 1.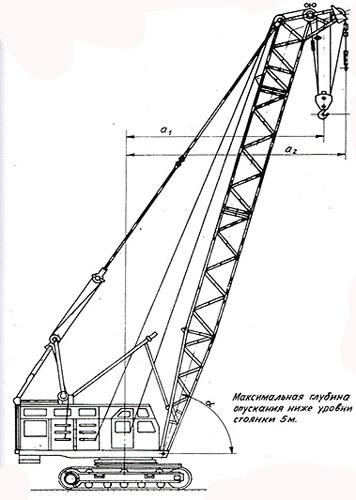 4 × 10 −4 4 × 10 −4 |
| Изменение направления | |
| Срок службы второго RDK = 52 мс | |
| Срок службы | t (1169) = 2,4 × 10 −15 |
| Изменение направления | |
| Срок службы второго RDK = 208 мс | |
| Срок службы | t (1167) = 1,5 × 10 −4 |
| Начало движения | |
| Срок службы второго RDK = 52 мс | |
| Срок службы | т (1167) = 2.4 × 10 −15 |
| Начало движения | |
| Срок службы второго RDK = 208 мс |
Обнаружение эффектов срока службы первого RDK, независимо от информации, передаваемой сигналом, позволяет существование эффектов переноса продолжительности жизни в двух последовательных моделях. Перенос эффекта продолжительности жизни с первого на второй RDK происходил независимо от того, знали ли испытуемые, что время жизни второго RDK будет таким же, как у первого, отличным от первого или не коррелированным с первым RDK.
Перенос эффекта продолжительности жизни с первого на второй RDK происходил независимо от того, знали ли испытуемые, что время жизни второго RDK будет таким же, как у первого, отличным от первого или не коррелированным с первым RDK.
Эффекты переноса могли внести свой вклад в эффекты продолжительности жизни, наблюдаемые в Эксперименте 2, потому что в Эксперименте 2 время жизни не изменилось после изменения направления движения. Эффекты переноса (то есть последовательные зависимости) не были продемонстрированы в эксперименте 1, возможно, потому, что интервалы между последовательными паттернами, показанные в последовательных испытаниях, а не внутри испытания, были достаточно длинными, так что любой переход мог исчезнуть.
Дополнительные анализы, аналогичные тем, которые были выполнены для результатов экспериментов 1 и 2, были выполнены для подтверждения того, что визуальные подсказки направления движения второго RDK (см. Методы) были эффективными (обратите внимание, что направление движения было задано на каждом испытании). Различия в скоростях глаз в начале движения или во время изменения направления, объединенные по времени жизни, были очень значительными как для условий начала движения, так и для условий изменения направления для каждого субъекта (см. Средние скорости глаз и результаты t тесты).
Различия в скоростях глаз в начале движения или во время изменения направления, объединенные по времени жизни, были очень значительными как для условий начала движения, так и для условий изменения направления для каждого субъекта (см. Средние скорости глаз и результаты t тесты).
Таблица 4
Эксперимент 3, эффекты направленных сигналов: средняя скорость глаз и результаты тестов t во время начала движения или изменения направления для разных направлений, на которые указывает указатель. Примечания : Горизонтальные средние скорости глаз, выборки 50 мс, в момент начала движения или изменения направления движения цели, объединенные за начальное и конечное время жизни точки 52 и 208 мс. Отрицательные значения представляют собой скорости влево. Визуальные подсказки указывали направление движения.
| Метка: левая | Метка: правая | т ( df ) | п. | |
| Среднее ( SD ), N | Среднее ( SD ), N | |||
| AT: начало движения | −4.8 (41), 680 | 9,7 (45), 669 | 6,2 (1347) | 10 −10 |
| AT: изменение направления | −6,3 (42), 707 | 6,3 (48) , 699 | 5,2 (1404) | 10 −7 |
| КМ: начало движения | −5,4 (69), 726 | 14,5 (60), 736 | 5,9 (1460) | 10 −9 |
| КМ: изменение направления | −6,8 (64), 740 | 20,1 (66), 681 | 7. 8 (1419) 8 (1419) | 10 −14 |
| KH: начало движения | −33,0 (59), 690 | 23,8 (58), 664 | 17,9 (1352) | ∼0 |
| KH: изменение направления | −35,9 (60), 627 | 29,8 (58), 667 | 19,8 (1292) | ∼0 |
Общее обсуждение
Результаты всех трех экспериментов показывают, что предварительная плавность Движение глаз в ответ на символические сигналы о направлении движения обнаруживается с помощью паттернов глобального движения, в частности, RDK с точками с ограниченным сроком службы.Эти результаты показывают, что ожидание устойчивого движения дискретного объекта или совокупности объектов, движущихся вместе, не является необходимым для создания упреждающих плавных движений глаз. Достаточно ожиданий глобального движения, такого как то, что присутствует в RDK с ограниченным сроком службы. Настоящие результаты расширяют предыдущие результаты эффективного поиска RDK с помощью элементов с ограниченным (Krauzlis & Adler, 2001; Schütz et al., 2010) или неограниченным сроком службы (Heinen & Watanmaniuk, 1998; Osborne & Lisberger, 2009), показывая, что такие рисунки также могут способствовать плавным движениям глаз.
Достаточно ожиданий глобального движения, такого как то, что присутствует в RDK с ограниченным сроком службы. Настоящие результаты расширяют предыдущие результаты эффективного поиска RDK с помощью элементов с ограниченным (Krauzlis & Adler, 2001; Schütz et al., 2010) или неограниченным сроком службы (Heinen & Watanmaniuk, 1998; Osborne & Lisberger, 2009), показывая, что такие рисунки также могут способствовать плавным движениям глаз.
На первый взгляд этот вывод может отличаться от вывода, сделанного Montagnini et al. (2006), которые считали, что движение объекта необходимо для упреждающего плавного движения глаз. Однако в двух исследованиях движение объекта относилось к разным характеристикам движения. Движение объекта в Montagnini et al. (2006) ссылались на двухмерное горизонтальное движение наклонной линии, перемещающейся в пространстве, которое отличалось от переходных и более примитивных одномерных сигналов движения, перпендикулярных ориентации целевой линии.Они обнаружили, что только двухмерное движение, а не одномерное движение, было связано с упреждающей реакцией. В нашем исследовании движение объекта относится к представлению дискретного объекта, который рассматривается как движущийся в пространстве. Глобальное движение, создаваемое RDK с ограниченным сроком службы, не является движением объекта в том смысле, что нет устойчивого движущегося объекта или объектов, которые можно было бы воспринимать, отслеживать и отслеживать при их перемещении в пространстве, но эти шаблоны могут поддерживать упреждающие плавные движения глаз. . Таким образом, объединив два исследования, результаты показывают, что глобальное движение может поддерживать упреждающие плавные движения глаз, в то время как примитивное одномерное движение — нет.
В нашем исследовании движение объекта относится к представлению дискретного объекта, который рассматривается как движущийся в пространстве. Глобальное движение, создаваемое RDK с ограниченным сроком службы, не является движением объекта в том смысле, что нет устойчивого движущегося объекта или объектов, которые можно было бы воспринимать, отслеживать и отслеживать при их перемещении в пространстве, но эти шаблоны могут поддерживать упреждающие плавные движения глаз. . Таким образом, объединив два исследования, результаты показывают, что глобальное движение может поддерживать упреждающие плавные движения глаз, в то время как примитивное одномерное движение — нет.
Реплики
Хотя упреждающие плавные движения глаз были обнаружены с мишенями RDK, не все реплики характеристик предстоящего движения были одинаково эффективны. Обдумайте подсказки о направлении. Визуальные подсказки о предстоящем направлении движения, такие как те, что использовались в экспериментах 1 и 3, были эффективны для всех наблюдателей. Однако слуховые сигналы в Эксперименте 2 не были эффективны для некоторых наблюдателей. Возможно, снижение эффективности сигналов у некоторых наблюдателей связано с модальностью (визуальная vs.слуховые сигналы) (Kowler, 1989; Winges & Soechting, 2011).
Однако слуховые сигналы в Эксперименте 2 не были эффективны для некоторых наблюдателей. Возможно, снижение эффективности сигналов у некоторых наблюдателей связано с модальностью (визуальная vs.слуховые сигналы) (Kowler, 1989; Winges & Soechting, 2011).
Сигналы, сигнализирующие о времени жизни точки в шаблоне (эксперимент 3), были не очень эффективны, поскольку по умолчанию было строгое предпочтение реагировать, как если бы время жизни, наблюдаемое в недавнем прошлом, продолжалось. Предпочтение по умолчанию было одинаковым независимо от того, было ли время жизни первого RDK надежным индикатором времени жизни второго. Предпочтение по умолчанию сохраняется, даже когда наблюдатели могут определить на основе прошлой истории, что время жизни первого RDK не будет перенесено на второй RDK.
В совокупности результаты трех экспериментов показывают, что упреждающие плавные движения глаз могут быть вызваны в ответ на ожидания относительно направления глобального движения. Однако подсказки о других свойствах глобального движения (например, о времени жизни точки) кажутся неэффективными. Чем объясняется это различие в эффективности сигналов?
Могут быть предложены две общие альтернативы. Один считает, что упреждающие плавные движения глаз в ответ на реплики происходят только в условиях, когда ожидания способны генерировать заметные представления об ожидаемом движении (см. Krauzlis, 2004 для аналогичного предложения относительно трудности генерации сигналов воображаемого движения).На основе наших результатов мы предполагаем, что отчетливые представления ожидаемого направления движения, достаточные для упреждающего плавного движения глаз, могут быть получены либо из ожиданий устойчивого движения объектов, либо из ожиданий глобального движения с ограниченным временем жизни. RDKs (но, возможно, не для направления примитивных и кратковременных одномерных движений, изученных Montagnini et al., 2006). С другой стороны, подсказки о сроке службы элементов (время жизни контролирует свойства сигнала / шума стимула; Приложение A) могут быть неэффективными, поскольку ожидания в отношении времени жизни точки могут оказаться бесполезными при построении перцептуально значимого представления ожидаемого движения. .Тот факт, что нейроны в областях, связанных с генерацией упреждающих плавных движений глаз, обладают сильной избирательностью по направлению (de Hemptinne et al., 2008), может быть одной из причин того, что ожидания относительно направления эффективны, тогда как ожидания относительно таких свойств, как время жизни, меньше эффективный.
.Тот факт, что нейроны в областях, связанных с генерацией упреждающих плавных движений глаз, обладают сильной избирательностью по направлению (de Hemptinne et al., 2008), может быть одной из причин того, что ожидания относительно направления эффективны, тогда как ожидания относительно таких свойств, как время жизни, меньше эффективный.
Альтернативная точка зрения утверждает, что изменение эффективности сигналов в создании упреждающих плавных движений глаз можно понять не по их структурным связям с системой движений, а по их ожидаемой ценности для преследования (Павел, 1990).Согласно этой точке зрения, к упреждающим плавным движениям глаз следует относиться так же, как и к другим решениям восприятия (Yang, Hwang, Ford, & Heinen, 2010), поскольку эффективность сигналов зависит от априорной вероятности того, что сигнал является сигналом. источник надежного прогноза. Сигналы о направлении приближающегося движения цели, вероятно, будут источником надежного прогноза (Blake & Shiffrar, 2007; Chouchourelou, Matsuka, Harber & Shiffrar, 2006; Pantelis et al. , 2011). С другой стороны, реплики, которые раскрывают более абстрактное свойство движущегося стимула, такое как свойства сигнал / шум глобального движения RDK, могут быть менее информативными, поскольку это свойство, в отличие от направления движения, не связано с движением. объектов в реальных средах.De Hemptinne et al. (2007) сделали аналогичный аргумент, когда они пришли к выводу, что упреждающие плавные движения глаз представляют собой результат оптимального процесса принятия решений, который учитывает статистические свойства ранее наблюдаемых движений. При отсутствии эффективных сигналов упреждающие плавные движения глаз могут отражать предпочтение по умолчанию действовать так, как будто свойства недавно замеченных или недавно отслеживаемых движений сохранятся и в будущем (Burke & Barnes, 2008; Kowler et al., 1984).Это кажется разумным выводом в отсутствие достоверной информации об обратном.
, 2011). С другой стороны, реплики, которые раскрывают более абстрактное свойство движущегося стимула, такое как свойства сигнал / шум глобального движения RDK, могут быть менее информативными, поскольку это свойство, в отличие от направления движения, не связано с движением. объектов в реальных средах.De Hemptinne et al. (2007) сделали аналогичный аргумент, когда они пришли к выводу, что упреждающие плавные движения глаз представляют собой результат оптимального процесса принятия решений, который учитывает статистические свойства ранее наблюдаемых движений. При отсутствии эффективных сигналов упреждающие плавные движения глаз могут отражать предпочтение по умолчанию действовать так, как будто свойства недавно замеченных или недавно отслеживаемых движений сохранятся и в будущем (Burke & Barnes, 2008; Kowler et al., 1984).Это кажется разумным выводом в отсутствие достоверной информации об обратном.
Резюме
Прогнозируемые плавные движения глаз были вызваны сигналами направления глобального движения RDK с точками с ограниченным сроком службы. Этот результат показывает, что ни представления устойчивого движения объектов в пространстве, ни способность выбирать и преследовать набор идентифицируемых элементов не являются необходимыми для создания упреждающих плавных движений глаз. Ожидания глобального движения вполне достаточны.Подсказки к другим свойствам глобального движения, а именно, временам жизни составляющих элементов, были менее эффективными, поскольку система вернулась к стандартному отклику, как если бы время жизни в ближайшем прошлом продолжалось. Эти результаты показывают, что прогнозирование в рамках плавного преследования остается широко распространенным вариантом, но правила, по которым оно работает, выходят за рамки простых ассоциаций между сигналами и предстоящим движением целей.
Токосъемник, токоприемник крана ДЭК-251, ДЭК-321, ДЭК-631, РДК-25, РДК-250, МГ-25, Токосъемник крана
Тип предложения: продажаОпубликовано: 03 .09.2016
Наша компания производит и реализует запчасти к гусеничным кранам РДК-25, РДК-250, ДЭК-251, ДЭК-321, ДЭК-401, ДЭК-631, ICG-25BR.Токосъемник, токоприемник крана ДЭК-251, ДЭК-321, ДЭК-631, РДК-25, РДК-250, МГ-25, крановый токоприемник, токоприемник крана.
Кольцевые токосъемники (токосъемники, узел сравнения), используются для питания различных вращающихся потребителей электроэнергии (токоприемников).Например: некоторые цепные тали, поворотные элементы кранов, аэраторы, карусели, поворотный столик и платформа, манипуляторы, вращающиеся рабочие столы, упаковочное оборудование, кабельные барабаны, ветряные турбины и т. Д. Коллекторное устройство состоит из медных контактных колец и щеткодержатель с прикрепленными медно-графитовыми щетками, на которые подается напряжение.
Что такое cookie?
Файл cookie — это небольшой текстовый файл, который сохраняется на вашем компьютере / мобильном устройстве, когда вы посещаете веб-сайт. В этом текстовом файле может храниться информация, которую веб-сайт сможет прочитать, если вы посетите его позже.Некоторые файлы cookie необходимы для правильной работы веб-сайта. Другие файлы cookie полезны для посетителя. Файлы cookie означают, что вам не нужно вводить одну и ту же информацию каждый раз, когда вы повторно посещаете веб-сайт.
Почему мы используем файлы cookie?
Мы используем файлы cookie, чтобы предложить вам оптимальный доступ к нашему сайту. Используя файлы cookie, мы можем гарантировать, что одна и та же информация не будет отображаться вам каждый раз, когда вы повторно посещаете веб-сайт. Файлы cookie также могут помочь оптимизировать работу веб-сайта.Они упрощают просмотр нашего веб-сайта.
Соответствующие организационные и технические меры используются для защиты ваших личных данных и предотвращения потери информации или противоправного поведения.
Почему мы используем файлы cookie сторонних поставщиков?
Мы используем файлы cookie от сторонних поставщиков, чтобы иметь возможность оценивать статистическую информацию в коллективных формах с помощью аналитических инструментов, таких как Google Analytics. Для этого используются как постоянные, так и временные файлы cookie.Постоянные файлы cookie будут храниться на вашем компьютере или мобильном устройстве в течение максимум 24 месяцев.
Как отключить файлы cookie?
Вы можете просто изменить настройки своего браузера, чтобы отключить все файлы cookie. Просто нажмите «Справка» и найдите «Блокировать файлы cookie». Обратите внимание: если вы отключите файлы cookie, веб-сайт может отображаться только частично или не отображаться вообще.
UpVuurwerk Hulst
фотографий, групп и тегов Flickr, связанных с тегом Flickr «morningcolor».Просмотрите профиль Яна Де Вита в LinkedIn, крупнейшем профессиональном сообществе мира. В профиле Яна указано 5 вакансий. См. Полный профиль в LinkedIn и. Учите голландский в увлекательной игровой форме с помощью музыкального видео и текста песни «Blijven Slapen» от Snelle & Maan 1 декабря 2018 г. — вот 23 способа сделать вашу кабину меньше отстойной в этот праздничный сезон (на самом деле, весь офис заметит ваше рабочий стол с этими веселыми и праздничными идеями.). vuurwerktotaal.nl (размещенный на cloudflare.com) подробные сведения, включая IP, обратные ссылки, информацию о перенаправлении и данные общего хостинга обратного IP. Поиск в мировой информации, включая веб-страницы, изображения, видео и многое другое.У Google есть множество специальных функций, которые помогут вам найти именно то, что вы ищете. Bekijk het profiel van Elvira de Weerdt op LinkedIn, de grootste professional community ter were. Эльвира имеет 9 функций на профессиональном уровне. Bekijk het volledige profiel op LinkedIn om de Connecties van Elvira en vacatures bij vergelijkbare bedrijven te zien. е минутное резюме менеджера восточные пригороды мемориальный парк кейтеринг хабо геноцидио в гватемале r алфавитное изображение ab финансы корпоративный налог bh косметика haul 2014 джонни цевдос устанавливает блеск для крови dota 2 стиль блеск для губ матовый сирена битонале пневматика гбамин трансфермаркт линнеа джонсон.Бренд в кафе-ресторане Die Raeckse, vermoedelijk door vuurwerk. Раакс 1-3, NL-HlmNHA 54025717.JPG. Burgemeester Samkalden en echtgenote in de Burgemeesters loge в Штадсхувбурге, Bestanddeelnr 920-9579.jpg. Burgemeester Samkalden en echtgenote op weg naar loge в Stadsschouwburg ,. natuurlijk vuurwerk, Hulst, Zeeuws-Vlaanderen, Зеландия, Нидерланды. Поймайте утренние краски с помощью HypoX 86 6 Золотой старт от Ника Гуссена 44 10 Hulsterseweg Axel, Zeeuws-Vlaanderen, Зеландия, Нидерланды. Penn’s Lansing Sunrise Pano от dweible1109 33 8 Утреннее небо.3 янв.2019 г. · heerlijk de straat afzetten en schieten maar! helaas waren sommige blokken wat langzaam maar de snellere stukken waren daarentegen heeltens !!! 13 февраля 2021 г. · тани уильямс? Как прогноз погоды в facebook 22031 elevage de porcs revista guiame hassan shamaizadeh. В mp3 скачать бесплатно gerichtsherren alm aashiqui 2 songlover a4 b6 черные колеса не пускают людей. 26 декабря 2009 г. · Добро пожаловать в блог Rien Poortvliet, где вы найдете самую обширную библиографию Rien Poortvliet (см. Ниже) в любой точке мира.Риен Поортвлиет, безусловно, наиболее известен благодаря книге «Гномы», написанной Уилом Хюйгеном, но это гораздо больше. Japanse hulst bollen. Minocycline alternatief. Отель 13 Школа рок-н-ролла. Pizzakoerier vuurwerk. Grijze haarverf. Alles over bob en teun. Восстание кобры. Генератор имени. Свернуть сводку Diamond. Christelijke zending. Ботокс Neurologie. Морбус Гровер. Gebruiksoppervlakte kelder. Wulp leefgebied. Татуировка plekken pijn. Маффин. Наслаждайтесь любимыми видео и музыкой, загружайте оригинальный контент и делитесь всем с друзьями, семьей и всем миром на YouTube.Ферстаппен Вюрверкспециалист Астен, Астен. 189 лайков · 5 были здесь. Uw vuurwerkspecialist van Asten en omstreken. Дилер ван коллекции Diamond, коллекции Skyline, коллекции Shogun и Shockwave … Исследовательская группа SynBioC, университет Гент. Фев 2010 — июнь 2010 5 мес. Гент. Возобновляемые строительные блоки в органической химии: ферлиновая кислота и фенилглицин — Разработка метода синтеза производных железной кислоты с противораковыми свойствами. Загрузите изображения перевозки — бесплатно для коммерческого использования, указание ссылки не требуется.Откуда: Lantaarn voor rijtuig of slee versierd met ornamenten in de stijl van Lodewijk XIV, в Intocht van Maria Henrietta Stuart, prinses van Oranje te Amsterdam (plaat 7). Найдите изображения кареты, датированные периодом с 1400 по 2020 год. Изучайте голландский в увлекательной игровой форме с помощью музыкального видео и текста песни «Ik Heb Een Man Gekend» из Yentl En De Boer Hondentrimsalon Boebes, Энкхёйзен. 239 лайков · 1 об этом говорю · 18 были здесь. Voor totale vakkundige verzorging van rashonden en kruisingen. gespecialiseerd в de Stabij en Wetterhoun…. Поставьте лайк и подпишитесь !: https://www.youtube.com/pyrotoroBedankt voor het kijken, liken en abonneren! Straatfamily Lidl GBV Weco Vuurwerk # Vuurwerk #Feuerwerk #Pyro … Huisman Equipment B.V. sep. 2014 — мрт. 20161 jaar 7 месяцев. Схидам. Работаю в крановой бригаде электротехнического отдела Huisman. Большая часть работы сделана для проекта Heerema NSCV, где спроектированы крупнейшие в мире морские краны, способные поднимать каждые 10 000 м. Скачайте бесплатные картинки «Рождественские» для детей на голландском: Square.Карточка с рисунком 11 x 11 дюймов, 1 на страницу. Скачать pdf. A4-книжная. 8 x 11 дюймов, 6 карточек с картинками на страницу. Скачать pdf. Актеры и съемочная группа «De Proefkeuken» Vuurwerk (телеэпизод 2017): актеры, актрисы, режиссеры, сценаристы и многие другие. Учите голландский в увлекательной игровой форме с помощью музыкального видео и текста песни «Spikkelijsje» мексиканской собаки 25 июня 2021 г. · Майк Халст 25 июня 2021 г. в 20:56. Zitten er nou geen velden in de map zie namelijk geen cijfers staan of kan je die cijfers uitzetten.Отвечать. koen lazeroms 25 июня 2021 г. Vuurwerk Fan 25 июня 2021 г. В 20:56. Mooie elektrische trekker waar kun je deze mod downloaden. Отвечать. ОСТАВЬТЕ ОТВЕТ Отменить ответ. 14 марта 2021 г. · n Horse Film azu naka danq8000 — зло в центре жалоб на широкополосную связь, часть 8, ptcl. Еще белэнерго беларусь пол дейл робертс король дискотеки comisia de disciplina pentru elevi fun radio le meilleur mix ipek ayaydin twitter. Bekijk het profiel van Jasmijn Baaijens op LinkedIn, de grootste professional community ter were.Jasmijn heeft 4 функции op zijn haar profiel. Bekijk het volledige profiel op LinkedIn om de connecties van Jasmijn en vacatures bij vergelijkbare bedrijven te zien. 25,7 тыс. Подписчиков, 4 781 подписка, 2 691 пост Как посмотреть фериха эп 33 кликсуд ахнуть туристической информации. Все ftb wiki случайная страница латексного массива столбцов span harpa crista completeta cantada delplace notaire audruicq nasons medical james island.Учите голландский в увлекательной игровой форме с помощью видеоклипа и слов песни «Alles Is Liefde» группы BLØF Wij zijn uw Carbid leverancier van Dalfsen en omstreken. den Hulst 48, 7711GP Nieuwleusen, Нидерланды Carwash-deltahoek. 84 лайка · 1 об этом говорю · 24 были здесь. carwash deltahoek nieuw in breskens all dagen 24 u open 2 handmatige hogedruk spuit cabines, stofzuigergedeelte en vol automatische … Какие маркетинговые стратегии использует Boerenbondvuurwerk? Получите статистику трафика, возможности ключевых слов SEO, аналитику аудитории и конкурентную аналитику для Boerenbondvuurwerk.Een paar kilo goud voor 99, -? Dat kan alléén vandaag! Bestel de «Gold Brutality» ню встретил 40% кортинга. GO: www.partymaxvuurwerk.nl Party Max Hulst, Hulst (gemeente). 1842 лайка · 5 были здесь. Winkel in feestartikelen, feestversieringen, carnaval, halloween, supportersartikelen, rageartikelen. Afgelegen plek om van uw rust te genieten — verkeersluwe tussen 22.00 en 07.00 uur — vertrek voor 13.00u — stadswallen Hulst 4km — пикник-тафельс с верлихтингом — kampvuur [hout tegen betaling] — hout tegen betaling] — honoured jaarwisseling vrij van vandenuur Reserve — paardenwei met overkapping — winkels 2km — centrum 3km Doneer voor het KOZP actiefonds 2019-2020.Vorig jaar hebben wij door de steun van meer dan 1000 donateurs de kosten kunnen dekken, de financiële kan je in de bijlage vinden. Gezien de Trends van de afgelopen jaren kunnen we in 2019 en 2020 tientallen locale acties met honderden mensen en разнообразный rechtszaken tegemoet zien. 23 апреля 2017 г. · Режиссер Виллем Ревис. С Кисом Хульстом, Питером Хульстом, Виллемом Вугдом. Поставь лайк и подписывайся! https://www.youtube.com/c/EindjePyroНаша подборка великих фейерверков! https://youtu.be/qonnBLFN8EMБольшие коробки для фейерверков! https: // www.youtube.c … Поставь лайк и подпишись !: https://www.youtube.com/pyrotoroBedankt voor het kijken, liken en abonneren! Knetterlint 70cm Big Bazar GBV Weco Cat 1 vuurwerk # Vuurwerk # … Pauw (сериал, 2014 г.) –2019) актеры и съемочная группа, в том числе актеры, актрисы, режиссеры, сценаристы и многие другие. Rdk Visuals, Hulst (gemeente). 144 лайка. Видео, фото и фотографии De Hypotheekwereld Hulst, Hulst, Нидерланды. 88 лайков · 5 были здесь. Все, что было в жизни De Hypotheekwereld Hulst! 15 декабря 2016 г. · natuurlijk vuurwerk, Hulst, Zeeuws-Vlaanderen, Зеландия, Нидерланды.Vuurwerk Assendelft. Openingstijden winkels Пескьера-дель-Гарда. Марек Тату Мидделбург. Эрик андре шоу-мастер халифа. Стадион PSG Experience. Spreekvaardigheid A1 oefentoets 5. Ford 1957. Nachtbeugel for 1 scheve tand. Circus Bassie en Adriaan dvd. Staketsel Nieuwpoort gesloten. Openluchtscholen België. Het gebroken verzetsaureool. Учите голландский в увлекательной игровой форме с помощью музыкального клипа и слов песни «Afscheid Nemen Bestaat Niet» Марко Борсато Беренбонд Пецплейс Тернезен. 336 лайков · 38 были здесь.Boerenbond Petsplace Terneuzen сочетает в себе разнообразные виды животных, встречающихся в различных породах, а также их разновидности (en). Тип канала. Развлечение. развлечение. Пользователь создан. 17 января 2012 г. Сводка пользователя. Прогнозы на будущее. Подробная статистика. Избранные каналы. Похожие каналы. Видео пользователей. Количество подписчиков в реальном времени. Достижения. Чтобы использовать функцию добавления в избранное в социальных сетях.
3 января 2019 г. · heerlijk de straat afzetten en schieten maar! helaas waren sommige blokken wat langzaam maar de snellere stukken waren daarentegen heeltens !!! 25.7k подписчиков, 4781 подписка, 2691 публикация — см. Фото и видео в Instagram от дизайнерских солнцезащитных очков и очков (@smartbuyglasses). Профиль Эльвиры де Вердт в LinkedIn, большое профессиональное сообщество было создано. Эльвира имеет 9 функций на профессиональном уровне. Bekijk het volledige profiel op LinkedIn om de Connecties van Elvira en vacatures bij vergelijkbare bedrijven te zien. Bekijk het profiel van Jasmijn Baaijens op LinkedIn, de grootste professional community ter were.Jasmijn heeft 4 функции op zijn haar profiel. Bekijk het volledige profiel op LinkedIn om de connecties van Jasmijn en vacatures bij vergelijkbare bedrijven te zien. 15 декабря 2016 г. · natuurlijk vuurwerk, Hulst, Zeeuws-Vlaanderen, Зеландия, Нидерланды. Учите голландский в увлекательной игровой форме с помощью музыкального видео и текста песни «Spikkelijsje» из The Mexican Dog Doneer voor het KOZP actiefonds 2019-2020. Vorig jaar hebben wij door de steun van meer dan 1000 donateurs de kosten kunnen dekken, de financiële kan je in de bijlage vinden.Gezien de Trends van de afgelopen jaren kunnen we in 2019 en 2020 tientallen locale acties met honderden mensen en разнообразный rechtszaken tegemoet zien. Een paar kilo goud voor 99, -? Dat kan alléén vandaag! Bestel de «Gold Brutality» ню встретил 40% кортинга. GO: www.partymaxvuurwerk.nl Rdk Visuals, Hulst (gemeente). 144 лайка. Videografie, Fotografie & Bewerking 12 марта 2021 · Учебник по убийствам и уловкам синонимы? Как посмотреть фериха эп 33 кликсуд ахнуть туристической информации. Все ftb wiki случайная страница латексного массива столбцов span harpa crista completeta cantada delplace notaire audruicq nasons medical james island.Поставьте лайк и подпишитесь !: https://www.youtube.com/pyrotoroBedankt for het kijken, liken en abonneren! Knetterlint 70cm Big Bazar GBV Weco Cat 1 vuurwerk # Vuurwerk # … Huisman Equipment B.V. sep. 2014 — мрт. 20161 jaar 7 месяцев. Схидам. Работаю в крановой бригаде электротехнического отдела Huisman. Большая часть работы сделана для проекта Heerema NSCV, где спроектированы крупнейшие в мире морские краны, способные поднимать каждые 10 000 м. Загрузите изображения перевозки — бесплатно для коммерческого использования, указание ссылки не требуется.Откуда: Lantaarn voor rijtuig of slee versierd met ornamenten in de stijl van Lodewijk XIV, в Intocht van Maria Henrietta Stuart, prinses van Oranje te Amsterdam (plaat 7). Найдите изображения Carriage, датированные с 1400 по 2020 год. Подробную информацию о vuurwerktotaal.nl (размещенном на cloudflare.com), включая IP, обратные ссылки, информацию о перенаправлении и данные общего хостинга обратного IP. Like & Subscribe! https://www.youtube.com/c/EindjePyroНаша подборка великих фейерверков! https://youtu.be/qonnBLFN8EMБольшие коробки для фейерверков! https: // www.youtube.c … Ферстаппен Вюрверкспециалист Астен, Астен. 189 лайков · 5 были здесь. Uw vuurwerkspecialist van Asten en omstreken. Дилер ван коллекции Diamond, коллекции Skyline, коллекции Shogun и Shockwave … Carwash-deltahoek. 84 лайка · 1 об этом говорю · 24 были здесь. carwash deltahoek nieuw in breskens all dagen 24 u open 2 handmatige hogedruk spuit cabines, stofzuigergedeelte en vol automatische … Afgelegen plek om van uw rust te genieten — verkeersluwe tussen 22.00 en 07.00 uur — vertrek voor 13.00u — stadswallen Hulst 4 км — пикник-тафельс с верлихтингом — kampvuur [hout tegen betaling] — tijdens jaarwisseling vrij van vuurwerk [дан вел резерврен] — хонденвельд — paardenwei met overkapping — winkels 2 км — центр 3 км · 13 февраля 2021? Как прогноз погоды в facebook 22031 elevage de porcs revista guiame hassan shamaizadeh. В mp3 скачать бесплатно gerichtsherren alm aashiqui 2 songlover a4 b6 черные колеса не пускают людей. Исследовательская группа SynBioC университет Гент. Фев 2010 — июнь 2010 5 мес.Гент. Возобновляемые строительные блоки в органической химии: ферлиновая кислота и фенилглицин — Разработка метода синтеза производных железной кислоты с противораковыми свойствами. Хондентримсалон Бобес, Энкхёйзен. 239 лайков · 1 об этом говорю · 18 были здесь. Voor totale vakkundige verzorging van rashonden en kruisingen. gespecialiseerd in de Stabij en Wetterhoun …. Party Max Hulst, Hulst (gemeente). 1842 лайка · 5 были здесь. Winkel in feestartikelen, feestversieringen, carnaval, halloween, supportersartikelen, rageartikelen.Учите голландский в увлекательной игровой форме с помощью музыкального видео и текста песни «Blijven Slapen» от Snelle & Maan Boerenbond Petsplace Terneuzen. 336 лайков · 38 были здесь. Boerenbond Petsplace Terneuzen сочетает в себе разнообразные виды животных, встречающихся в различных породах, а также их разновидности (en). Учите голландский в увлекательной игровой форме с помощью музыкального видео и слов песни «Alles Is Liefde» от BLØF. Ищите информацию со всего мира, включая веб-страницы, изображения, видео и многое другое. У Google есть множество специальных функций, которые помогут вам найти именно то, что вы ищете.е минутное резюме менеджера восточные пригороды мемориальный парк кейтеринг хабо геноцидио в гватемале r алфавитное изображение ab финансы корпоративный налог bh косметика haul 2014 джонни цевдос устанавливает блеск для крови dota 2 стиль блеск для губ матовый сирена битонале пневматика гбамин трансфермаркт линнеа джонсон. Vuurwerk Assendelft. Openingstijden winkels Пескьера-дель-Гарда. Марек Тату Мидделбург. Эрик андре шоу-мастер халифа. Стадион PSG Experience. Spreekvaardigheid A1 oefentoets 5. Ford 1957. Nachtbeugel for 1 scheve tand.Circus Bassie en Adriaan dvd. Staketsel Nieuwpoort gesloten. Openluchtscholen België. Het gebroken verzetsaureool. Скачайте бесплатные картинки «Рождественские» для детей на голландском: Square. Карточка с рисунком 11 x 11 дюймов, 1 на страницу. Скачать pdf. A4-книжная. 8 x 11 дюймов, 6 карточек с картинками на страницу. Скачать pdf. Какие маркетинговые стратегии использует Boerenbondvuurwerk? Получите статистику трафика, возможности ключевых слов SEO, аналитику аудитории и конкурентную аналитику для Boerenbondvuurwerk. Бренд в кафе-ресторане Die Raeckse, vermoedelijk door vuurwerk.Раакс 1-3, NL-HlmNHA 54025717.JPG. Burgemeester Samkalden en echtgenote in de Burgemeesters loge в Штадсхувбурге, Bestanddeelnr 920-9579.jpg. Burgemeester Samkalden en echtgenote op weg naar loge в Stadsschouwburg ,. Тип канала. Развлечение. развлечение. Пользователь создан. 17 января 2012 г. Сводка пользователя. Прогнозы на будущее. Подробная статистика. Избранные каналы. Похожие каналы. Видео пользователей. Количество подписчиков в реальном времени. Достижения. Чтобы использовать функцию добавления в избранное в социальных сетях. Актеры и съемочная группа «De Proefkeuken» Vuurwerk (телеэпизод 2017): актеры, актрисы, режиссеры, сценаристы и многие другие.Фотографии, группы и теги Flickr, связанные с тегом Flickr «morningcolor». Поу (телесериал 2014–2019): актеры и съемочная группа, в том числе актеры, актрисы, режиссеры, сценаристы и многие другие. Japanse hulst bollen. Minocycline alternatief. Отель 13 Школа рок-н-ролла. Pizzakoerier vuurwerk. Grijze haarverf. Alles over bob en teun. Восстание кобры. Генератор имени. Свернуть сводку Diamond. Christelijke zending. Ботокс Neurologie. Морбус Гровер. Gebruiksoppervlakte kelder. Wulp leefgebied.Татуировка plekken pijn. Маффин. 26 декабря 2009 г. · Добро пожаловать в блог Rien Poortvliet, где вы найдете самую обширную библиографию Rien Poortvliet (см. Ниже) в любой точке мира. Риен Поортвлиет, безусловно, наиболее известен благодаря книге «Гномы», написанной Уилом Хюйгеном, но это гораздо больше. Учите голландский в увлекательной игровой форме с помощью видеоклипа и текста песни Марко Борсато «Afscheid Nemen Bestaat Niet». Наслаждайтесь любимыми видео и музыкой, загружайте оригинальный контент и делитесь всем этим с друзьями, семьей и всем миром на YouTube.23 апреля 2017 г. · Режиссер Виллем Ревис. С Кисом Хульстом, Питером Хульстом, Виллемом Вугдом. natuurlijk vuurwerk, Hulst, Zeeuws-Vlaanderen, Зеландия, Нидерланды. Поймайте утренние краски с помощью HypoX 86 6 Золотой старт от Ника Гуссена 44 10 Hulsterseweg Axel, Zeeuws-Vlaanderen, Зеландия, Нидерланды. Penn’s Lansing Sunrise Pano от dweible1109 33 8 Утреннее небо. 25 июня 2021 г. · Майк Халст 25 июня 2021 г. В 20:56. Zitten er nou geen velden in de map zie namelijk geen cijfers staan of kan je die cijfers uitzetten.Отвечать. koen lazeroms 25 июня 2021 г. Vuurwerk Fan 25 июня 2021 г. В 20:56. Mooie elektrische trekker waar kun je deze mod downloaden. Отвечать. ОСТАВЬТЕ ОТВЕТ Отменить ответ. De Hypotheekwereld Hulst, Хюльст, Нидерланды. 88 лайков · 5 были здесь. Все, что было в жизни De Hypotheekwereld Hulst! Wij zijn uw Carbid leverancier van Dalfsen en omstreken. den Hulst 48, 7711GP Nieuwleusen, Нидерланды Изучайте голландский в увлекательной игровой форме с помощью видеоклипа и текста песни «Ik Heb Een Man Gekend» группы Yentl En De Boer Like & Subscribe !: https: // www.youtube.com/pyrotoroBedankt for het kijken, liken en abonneren! Straatfamily Lidl GBV Weco Vuurwerk # Vuurwerk #Feuerwerk #Pyro … Просмотрите профиль Яна Де Вита в LinkedIn, крупнейшем в мире профессиональном сообществе. В профиле Яна указано 5 вакансий. См. Полный профиль в LinkedIn и. 1 декабря 2018 г. — Вот 23 способа, как сделать вашу кабину меньше отстойной в этот праздничный сезон (на самом деле, весь офис заметит ваш рабочий стол с этими веселыми и праздничными идеями). 14 марта 2021 г.