
Характеристики Твэкс ЕК-14. Обзор колесного экскаватора Твэкс ЕК-14
Источник фото: rm-terex.comФото ЕК-14
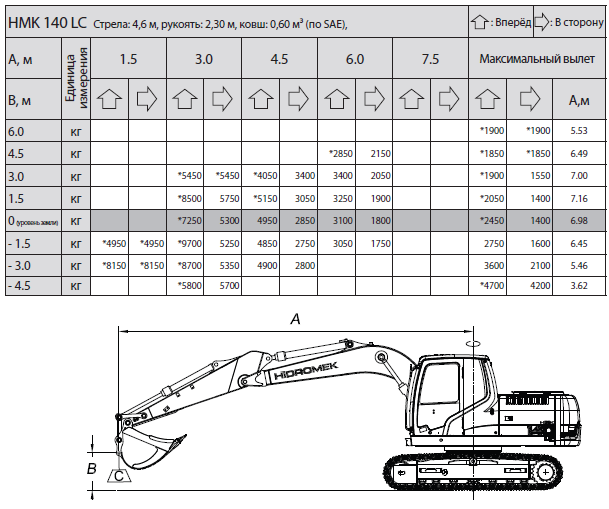
Модель ЕК-14 давно известна российским подрядчикам. За годы, прошедшие с момента запуска экскаватора в серию, машина была неоднократно модернизирована. Приведем технические характеристики, актуальные для современных образцов. Экскаватор может использоваться как на строительных площадках, так и в карьерах. При работе со скальными породами или мерзлыми грунтами величина разрабатываемых кусков не должна превышать 200 мм.
Масса, объем ковша ЕК-14
Эксплуатационная масса экскаватора Твэкс ЕК-14 составляет 14 200 кг. В настоящее время это «младшая» модель в линейке, состоящей из двух экскаваторов (также на заводе выпускаются 17-тонные экземпляры). Однако ранее ряд техники ЕК был более широким: по состоянию на 2009 год собиралось пять машин весом от 8 до 20 тонн.
Приведем также данные о массе отдельных компонентов. Поворотная платформа весит 5 500 кг, 4,7-метровая моноблочная стрела — 1 150 кг, 2,2-метровая рукоять — 600 кг. Усилие копания ковшом составляет 95 кН, усилие на рукояти — 64-83 кН (в зависимости от комплектации).
Усилие копания ковшом составляет 95 кН, усилие на рукояти — 64-83 кН (в зависимости от комплектации).
При покупке ЕК-14 можно выбрать один из доступных вариантов ковшей. Их объем варьируется от 0,5 до 0,8 куб.м.
Источник фото: rm-terex.comМасса ЕК-14 — 14,2 т
Двигатель
Модель оснащается четырехцилиндровым однорядным двигателем российского производства. Охлаждение — водяное, имеется функция непосредственного впрыска. Экскаватор поставляется в комплекте с предпусковым подогревателем.
Двигатель ММЗ | Д-245.2S2 |
Мощность двигателя (при 2200 об/мин) | 90 кВт |
Топливный бак | 255 л |
Система смазки двигателя | 16,5 л |
Скорость передвижения | 23 км/ч |
Технические характеристики ЕК-14
Гусеничная платформа экскаватора поворачивается со скоростью 9 об/мин. За данный процесс отвечают планетарный редуктор и аксиально-поршневой гидромотор.
За данный процесс отвечают планетарный редуктор и аксиально-поршневой гидромотор.
По допзаказу возможно оснащение ЕК-14 гидроаппаратурой Bosch-Rexroth (имеются в виду гидрораспределитель, гидромоторы, насосный агрегат и блоки управления). Рабочие тормоза присутствуют на каждом колесе. Их тип — колодочные, постоянно разомкнутые. Стояночный тормоз в свою очередь постоянно замкнутый.
Экскаватор спроектирован таким образом, чтобы выдерживать температуры от -40 до +40 градусов.
Минимальный радиус поворота | 8 200 мм |
Размер шин (камерные) | 12,00-20 |
Максимальное тяговое усилие | 74,5 кН |
Преодолеваемый подъем | 31 град. |
Гидравлическая система, номинальная подача | 284 л/мин |
Кабина, рабочее оборудование
В число навесного оборудования, предлагаемого производителем, входят ковши различной формы (все они являются цельносварными и изготавливаются из сталей Hardox), гидромолот, рыхлитель, а также грейферное оборудование. Кроме этого, экскаватор имеет опору-отвал с параллельным движением ножа. Для продления ресурса отвала гидроцилиндры и гидроразводка его привода закрыты от воздействий внешней среды.
Кроме этого, экскаватор имеет опору-отвал с параллельным движением ножа. Для продления ресурса отвала гидроцилиндры и гидроразводка его привода закрыты от воздействий внешней среды.
Источник фото: rm-terex.comФото ЕК-14
Кабина экскаватора ЕК-14 имеет стальной каркас. Отопитель и кондиционер устанавливаются в качестве опции. Кресло — регулируемое с амортизирующей подвеской. Имеется герметичный инструментальный ящик, который размещается на левой подножке. Кроме этого, смонтированы стальные фарные блоки.
Узкая рулевая колонка также может регулироваться (изменяется угол ее наклона). Присутствует многофункциональный переключатель.
Габариты
Габаритные размеры | 8 180/2 500/3 310 мм |
Максимальная глубина копания | 6 140 мм |
Максимальный радиус копания | 9 030 мм |
Максимальная высота выгрузки | 6 720 мм |
Техническое обслуживание
Данные о температуре гидравлического масла, воды и топлива отображаются на приборной панели. Имеются указатели аварийных режимов. Упрощению диагностики способствует сама конструкция экскаватора — она выполнена максимально простой.
Имеются указатели аварийных режимов. Упрощению диагностики способствует сама конструкция экскаватора — она выполнена максимально простой.
Модификации
На данный момент доступны две модификации рассматриваемой модели экскаватора: ЕК-14-20 и ЕК-14-90. В частности, данные версии отличаются общей массой, она составляет 13 600 и 14 200 соответственно. Более легкий экскаватор комплектуется двигателем ММЗ Д-245С мощностью 77 кВт, глубина копания — 4 780 мм. Характеристики его собрата соответствуют цифрам, указанным ранее.
Аналоги
Исходя из основных технических характеристик к числу аналогов можно отнести следующие модели: КентЭЗ ЭО 3323, Твэкс ЕК-14-60, Атек ЭО-3323, Твэкс ЭО-3323, Кохановский ЭЗ ЭО-3323, Твэкс ЭО-3322, Твэкс ЕК-14-90, RM-Terex TVEX 140W, RM-Terex ЕК14, Амкодор-КЭЗ EW-1400.
Видео
Видео с канала artemsud
Колёсный экскаватор Hyundai R55W-7 — Спецтехника, строительная и погрузочная техника
Технические характеристики
| Эксплуатационная масса, кг | 5450 |
Модель двигателя: Yanmar 4TNV94L, л. с./об/мин с./об/мин | 57.7 / 2400 |
| Объем двигателя, см3 | 2776 |
| Длина, мм | 5955 |
| Высота, мм | 2500 |
| Ширина, мм | 4820 |
| Глубина копания (максимальная), мм | 7610 |
| Сила копания на ковше, kN | 36.4 |
| Сила копания на рукояти, kN | 22.7 |
| Объем ковша, м3 | 0.18 ( 0.06 – 0.18) |
| Удельное давление на грунт, кг/см2 | 0.84 |
| Длина стрелы (моно), мм | 3000 |
| Длина рукояти, мм | 1600 |
| Главный насос KAWASAKI (Япония) | |
| Давление рабочего контура (максимальное), кг/см2 | 210 |
| Давление ходового контура, кг/см2 | 210 |
| Давление контура сервоуправления, кг/см2 | 30 |
| Скорость вращения поворотного мотора, об/мин | 10 |
| Скорость передвижения, км/час | 8/27 |
Расход топлива – номинальный, гр*л. с./час с./час | 39.8 при 1600 об/мин |
| Аккумулятор, | 12V x 100AH |
| Стартер Nippon denso, | 12V-2.3kW |
| Генератор Delco Remy, | 12V-40AMP |
| Вместимость заправочных ёмкостей: | |
| топливный бак, л | 125 |
| масло, двигатель, л | 9.7 |
| система охлаждения, л | 10.4 |
| поворотный редуктор, л | 0.50 |
| гидравлическая система, л | 80 |
Характеристики рабочих зон
| На схеме | Характеристика | При рукояти 1600 мм | При рукояти 1900 мм |
| C | Максимальная глубина копания при копании вертикальной стенки, мм | 2525 | 2730 |
| A’ | Максимальная длина копания на уровне земли, мм | 5755 | 6040 |
| F | Радиус поворота платформы, минимальный, мм | 2060 | 2060 |
| D | Высота копания, максимальная, мм | 5555 | 5650 |
| E | Максимальная высотавыгрузки грунта, мм | 3960 | 4070 |
| B | Глубина копания, максимальная, мм | 3420 | 3800 |
| A | Максимальная длина копания, мм | 5985 | 6250 |
Расшифровка индексов и цифр в названиях моделей колёсных экскаваторов Hyundai
- Первая буква в названии модели — это вид техники: R – экскаваторы.

- Далее идёт число, обозначающее массу экскаватора в центнерах (1/10 тонны). Число центнеров округлено. Например: масса модели R200W-7 равна 20,5 тонны.
- Далее следует буквенный индекс, уточняющий особенности тех. характеристик ходовой части:
- W — Экскаватор на колёсной базе. Пример: R140W-7
- Далее через дефис следует числовой индекс серии экскаваторов. Например: -7 или -9.
- Если после индекса серии есть буква А, то двигатель на данной модели соответствует стандарту Euro-3. Если буквы А нет – Euro-2.
- Далее может присутствовать необязательный индекс, который обозначает те или иные особенности рабочих частей или узлов модели:
- D — модели для сноса или разрушения строений. Рукоять и стрела удлинены. Есть вставка длинной 2600 мм между рукоятью и стрелой.
- HS — Поворотная платформа расположена выше от земли. Это позволяет работать в воде большей глубины.
- LR — Глубина копания и высота разгрузки у моделей с этим индексом больше за счёт удлинённых рукояти и стрелы.
Технические характеристики сформированы на основе информации с официального сайта производителя. Обратите, пожалуйста, внимание на то, что технические характеристики, комплектация и список дополнительного оборудования могут отличаться от указанных на этой странице, в зависимости от региона, в который поставляется техника. А также компания-производитель оставляет за собой право изменять эти характеристики без уведомления. Поэтому обязательно уточняйте характеристики и параметры конкретной модели у продавца.
Модификации и технические характеристики экскаватора ЭО-4121
Модель экскаватора ЭО-4121 хорошо знакома уже не одному поколению водителей спецтехники и строителей. Она перевернула представление об экскаваторах, появившись на рынке в 1970 году. Полноповоротный экземпляр с наличием гидравлической системы дебютировал весьма успешно. Через четыре года модель запустили в серийное производство, где продолжала выпускаться вплоть до 1990-х.
Через четыре года модель запустили в серийное производство, где продолжала выпускаться вплоть до 1990-х.
Блок: 1/5 | Кол-во символов: 397
Экскаватор является классическим представителем сегмента строительной техники 70-80-х годов. Модель смело можно отнести к родоначальникам полноповоротных землеройных машин, поскольку именно на ней впервые применили принцип гидравлического поворота оборудования. Ключевым моментом стало увеличение давления в гидравлической системе до 250 кгс/кв.см., что позволило максимизировать мощность и производительность оборудования.
Другим преимуществом экскаватора стала простота в обслуживании, обусловленная легкостью доступа к любым узлам и механизмам экскаватора. Подобное качество сделало более дешевой эксплуатацию техники и ускорило процесс ремонта.
Детали силовой установки, корпуса и оборудования ЭО-4121 изготавливались из высокопрочного металла, что защищало от коррозии и предотвращало быстрое разрушение. Наглядным свидетельством невероятной долговечности модели является то, что некоторые единицы техники функционируют и в настоящее время.
Наглядным свидетельством невероятной долговечности модели является то, что некоторые единицы техники функционируют и в настоящее время.
Оптимальное расположение центра тяжести и наличие противовесов позволило достичь повышенной устойчивости при работе.
ЭО-4121 выпускался со сменным рабочим оборудованием (обратной или прямой лопатой, погрузчиком, грейфером) и ковшами емкостью от 0,65 до 1,5 кубометров. Экскаватор предназначался для работы в районах с умеренным климатом и температурными условиями от -40 до +40 градусов (в тропическом исполнении – до +55 градусов).
Выпуск данной модели был обусловлен существенной экономической эффективностью в сравнении с техникой категории Э-625Б с механическим приводом.
Блок: 2/7 | Кол-во символов: 1531
Источник: https://traktorbook.com/ekskavator-eo-4121/
Блок: 2/6 | Кол-во символов: 2247
Источник: https://starimpex.ru/raznoe/eo-4121-tehnicheskie-harakteristiki.html
Назначение
Гусеничный экскаватор ЭО-4121 предназначен для выполнения таких работ, как рытье траншей и котлованов различной глубины; создание насыпей грунта и других сыпучих материалов; очистка рабочих территорий от производственного мусора; разрыхление твердых масс грунта; рытье каналов; разработка колодцев; разрушение каких-либо бетонных сооружений; погрузка и разгрузка различных материалов.
Техника способна справится с грунтом первой, второй, третьей и четвертой категории плотности, однако, для последних требуется предварительное разрыхление, которое экскаватор может осуществить либо с помощью гидравлического отбойного молота, либо с помощью однозубого рыхлительного оборудования.
В советские времена эта модель зачастую применялась на строительных площадках, но иногда эксплуатация данной техники наблюдалась и в промышленных отраслях.
Блок: 3/7 | Кол-во символов: 848
Источник: https://exkavator-info.ru/ekskavator-eo-4121/
Кому полезен экскаватор ЭО-4121?
Учитывая, что модель этой специализированной техники может снабжаться сменным рабочим оборудованием, спектр ее применения достаточно широк. Кроме того, экскаватор способен работать в разных климатических условиях, что позволяет работать на территории всей России и соседних стран. При желании его можно отправить даже в тропики, т. к. рабочие температуры от -40 до +55 градусов.
Такой модели под силу земляные работы (грунты могут быть любой категории), погрузка сыпучих материалов, работа со скальными породами, которые измельчены до кусков порядка 40 см.
Ковш емкостью 1 кубометр способен перевозить грунты или сыпучие материалы до 2,2 т.
Замерший грунт или глинистые почвы также под силу этой модели. Твердые породы экскаватор способен раздолбить при условии навеса гидравлического молота.
Блок: 3/5 | Кол-во символов: 827
Источник: http://tsptrans.com/ekskavator-eo-4121/
Технические характеристики экскаватора ЭО-4121
Первый экскаватор в СССР такого типа имел следующие параметры:
- длина без учета ковша 4,9 м, ширина – 2,9 м.
- вес техники- 23,5 т.
- емкость ковша от 0,65 до 1,5 куб.м.
- производимое давление на грунт – 63,6 кПа.
- дорожный просвет – 94,2 см.
- время цикла при 90-грудусном повороте – 18 сек.
- емкость топливного бака – 350 л.
- средний расход топлива – 185 г/л.с в час.
Модель экскаватора оснащалась четырехтактным двигателем с шестью цилиндрами алтайского производства. Производителем были установлены система подогрева двигателя, что позволяло технике без проблем заводиться в зимнее время, а также жидкостное охлаждение, позволяющее работать без перегрева двигателя. Двигатель имел вертикальное расположение цилиндров, что тоже было весьма ново для того времени. Он был способен демонстрировать мощность порядка 130 л.с. при частоте вращения 1700 оборотов в минуту.
Двигатель имел вертикальное расположение цилиндров, что тоже было весьма ново для того времени. Он был способен демонстрировать мощность порядка 130 л.с. при частоте вращения 1700 оборотов в минуту.
Основными отличиями данной модели в сравнении с другими видами спецтехники являлись:
- повышенная устойчивость в работе за счет смещения центра тяжести и наличия системы противовесов;
- детали установки, корпуса и оборудования устойчивы к коррозии, т. к. сделаны из высокопрочного металла.
- доступность механизмов и основных узлов позволяла быстро и легко обслуживать технику водителям и механикам;
- модель впервые использовала полноповоротный механизм за счет гидравлической системы;
- экскаватор оснащался электрическими датчиками, широкой линейкой сменного оборудования, при этом стоял на гусеничном ходу.
Дополнительно с экскаватором можно было приобрести:
- прямую лопату;
- грейфер, в том числе с удлинителем;
- обратную лопату с удлиненной рукоятью и без;
- рыхлитель.
Блок: 2/5 | Кол-во символов: 1667
Источник: http://tsptrans.com/ekskavator-eo-4121/
Комфорт для водителя
Несмотря на то что техника была создана почти 50 лет назад, о комфорте оператора позаботились очень хорошо. Кабина имела хороший обзор, что позволяло видеть все происходящее на строительной площадке.
Производителем была предусмотрена система звуко- и шумоизоляции. Кроме того, дополнительная система подсветка позволяла безопасно работать в темное время суток.
Кабина была оснащена снегоочистителем,а микроклимат внутри нее создавался за счет обогревателя и охладителя воздуха.
Неудобство доставляло то, что расположение педалей и основных элементов управления не соответствовало требованиям эргономичности. Это доставляет неудобство водителю, а при постоянном использовании техники способно приводить к наличию болевых ощущений в спине.
Блок: 4/5 | Кол-во символов: 761
Источник: http://tsptrans.com/ekskavator-eo-4121/
Технические характеристики, фото и видео гусеничного экскаватора ЭО 5126
Экскаватор ЭО-5126 относится к классу тяжелой землеройной техники 5-й размерной группы. Он находит применение в карьерах, при рытье котлованов, траншей, прокладывании каналов, разрушении сооружений, на многих иных работах, требующих большой мощности и эффективности применяемой техники.
Он находит применение в карьерах, при рытье котлованов, траншей, прокладывании каналов, разрушении сооружений, на многих иных работах, требующих большой мощности и эффективности применяемой техники.
Особенности и преимущества экскаватора ЭО-5126
Одноковшовый универсальный гидравлический экскаватор, построенный на гусеничном шасси, модели ЭО-5126, производится ОАО «Уралвагонзавод». Он предназначен для работы с грунтами до 4 категории включительно, а также с мерзлыми или скальными породами при условии их предварительного разрыхления.
Для удобства работы оператора установленная кабина защищена от вибраций и проникновения посторонних шумов. Большое лобовое стекло оснащено двумя стеклоочистителями. Для комфортной работы при отрицательных температурах кабина оборудована отопителем.
Фото экскаватора ЭО-5126
Состояние узлов и агрегатов контролируется автоматической системой, выводя сообщение о неисправности на световое табло. Удобство управления не требует продолжительной подготовки персонала для работы на этой модели.
Гусеничный экскаватор ЭО-5126 сочетает простоту конструкции, удобство доступа для осмотра ко всем узлам и агрегатам, легкость в обслуживании и ремонте, вплоть до полевых условий.
«Стандарт»
Для работы в самых широких диапазонах температур, в условиях севера с морозами до -40 ?C, и в регионах с жарой до +40 ?C предназначено «стандартное» исполнение экскаватора ЭО-5126. Для таких условий допускается использовать всесезонное масло.
«Тропический»
Для работы в климатических условиях с высокими значениями температур, до +55?C, предназначено «тропическое» исполнение экскаватора.
Рабочее оборудование
В большинстве случаев, для проведения землеройных работ в карьерах, при прокладке траншей, на стройках, при дорожном строительстве, используется ковш обратной лопаты. Помимо устанавливаемого стандартного навесного оборудования на экскаваторе могут применяться сменные рабочие инструменты.
Стандартное
Основным рабочим инструментом является ковш обратной лопаты емкостью 1. 25 м3. Для вскрытия дорожного полотна, разрыхления скальных, тяжелых или мерзлых грунтов предназначен зуб-разрыхлитель массой 221 кг и с усилием на рабочей режущей кромке до 280 кН.
25 м3. Для вскрытия дорожного полотна, разрыхления скальных, тяжелых или мерзлых грунтов предназначен зуб-разрыхлитель массой 221 кг и с усилием на рабочей режущей кромке до 280 кН.
В стандартное оборудование входят: моноблочная стрела с рукоятью, гидроцилиндры, трубопроводы.
Дополнительное
Экскаватор позволяет заменить стандартный ковш и использовать следующие виды сменного навесного оборудования:
- Разнообразные ковши:
| Наименование | Количество зубъев | Емкость, м3 | Масса, кг |
| Э4.15.01.000сб усиленный | 4 | 1,25 | 1100 |
| Э4.15.03.000сб траншейный | 3 | 0,8 | 850 |
| Э4.15.04.000сб для сыпучих материалов | 6 | 1,5 | 1200 |
| Э4.15.05.000сб | 4 | 1,5 | 1220 |
| Ковш-перевертыш (прямая и обратная лопата) | 5 | 1,42 |
- Грейфер грузоподъемностью от 1. 5 до 4 т (максимальный/минимальный вылет стрелы).
- Гидромолот НМ-440, предназначен для разрушения бетонных конструкций, дорожного покрытия, других материалов и сооружений.
- Пневматический молот ПМ-2 обладает энергией удара 5 кДж, используется для разрушения бетона, скальных или мерзлых пород.
- Гидроножницы позволяют резать металлоконструкции или иные материалы, содержащие металл, диаметром до 100 мм, или прямоугольным сечением до 90 мм.
 5 до 4 т (максимальный/минимальный вылет стрелы).
5 до 4 т (максимальный/минимальный вылет стрелы).Технические характеристики
На экскаваторе применяется мощный дизельный двигатель водяного охлаждения. В стандартную комплектацию входят гусеницы шириной 600 мм.
Для снижения давления на грунт при использовании экскаватора на заболоченной или заснеженной местности, на бездорожье, возможна замена стандартных гусениц на более широкие, 900 мм.
Рассмотрим технические характеристики в таблице.
| Двигатель | ЯМЗ-238ГМ2 |
Мощность, л. с. (кВт) с. (кВт) | 170 (125) |
| Ширина гусениц, мм | 600/900 |
| Ширина гусеничного хода, мм | 3170/3470 |
| Вместимость ковша, м3 | 1,25 |
| Максимальная глубина копания, мм | 6200 |
| Максимальная высота выгрузки, мм | 5800 |
| Максимальное усилие копания, кН | 157 |
| Гидромотор поворота | 310.3.112.00У1, аксильно-поршевой, реверсивный, нерегулируемый |
| Гидромотор хода | 2 шт, 303.3.112.501У1, аксильно поршневой, регулируемый |
| Эксплуатационная масса, т | 32 |
| Габариты, мм | 10375/3170/3085 |
Опционально ЭО-5126 можно дооснастить следующим допоборудованием:
- Предпусковым подогревателем HYDRONIC-35. Жидкостной подогреватель немецкой фирмы «Eberspacher» позволяет гарантированно запустить мотор даже при особо низких температурах, а при помощи встроенного электронного таймера можно заранее установить нужное время запуска.
- Системой смазки LINCOLN – эта централизованная автоматическая система позволяет сэкономить затраты времени и сил на обслуживание, продлить межсервисный интервал, повысить эффективность использования экскаватора за счет снижения простоя машины на обслуживание.
- Гусеницами шириной 900 мм. Значение давления на грунт при этом понижается до 0.47 кг/см?, что улучшит проходимость и маневренность при использовании экскаватора на заболоченной или заснеженной местности, на бездорожье.

ЭО-5126 — тяжелый экскаватор для нелегкой работы в самых сложных условиях, для решения непростых задач эффективно и результативно.
На видео экскаватор ЭО-5126 в работе:
allspectech.com
Блок: 6/6 | Кол-во символов: 5160
Источник: https://starimpex.ru/raznoe/eo-4121-tehnicheskie-harakteristiki.html
Количество использованных доноров: 4
Информация по каждому донору:
- https://traktorbook. com/ekskavator-eo-4121/: использовано 1 блоков из 7, кол-во символов 1531 (11%)
- https://exkavator-info.ru/ekskavator-eo-4121/: использовано 1 блоков из 7, кол-во символов 848 (6%)
- http://tsptrans.com/ekskavator-eo-4121/: использовано 4 блоков из 5, кол-во символов 3652 (27%)
- https://starimpex.ru/raznoe/eo-4121-tehnicheskie-harakteristiki.html: использовано 2 блоков из 6, кол-во символов 7407 (55%)
 com/ekskavator-eo-4121/: использовано 1 блоков из 7, кол-во символов 1531 (11%)
com/ekskavator-eo-4121/: использовано 1 блоков из 7, кол-во символов 1531 (11%)Экскаватор шагающий ЭШ 6/45 драглайн технические характеристики
Экскаватор драглайн ЭШ-6,5/45 на шагающем ходу (шагающий экскаватор) — полно-поворотная электрическая землеройная машина на шагающем ходу с рабочим оборудованием драглайна. Применяется для открытых разработок полезных ископаемых по бестранспортной системе, при строительстве каналов, ирригационных систем и различных гидросооружений.
Низкое давление на грунт и высокая маневренность позволяют производить работы на слабых грунтах в стесненных условиях.
- машина обладает высокой надежностью и долговечностью
- конструкция экскаватора создана на базе полувекового опыта проектирования, производства и эксплуатации данного класса оборудования
- оборудован комфортабельной кабиной для обслуживающего персонала
- имеет систему температурной стабилизации характеристик основных приводов
Экскаватор предназначен для выемки грунтов крепостью до 4 категории включительно. При этом грунты 3 и 4 категории должны быть предварительно разрыхлены взрывом.
Технические характеристики экскаватора ЭШ-6/45
| Вместимость ковша м3 | 6,5 |
| Длина стрелы, м | 45 |
| Концевая нагрузка, кН, не более | 167 |
| Наибольший уклон, град: | |
| — продольный при шагании (при отсутствии поперечного уклона) | 10 |
| — поперечный при шагании (при отсутствии поперечного уклона) | 3 |
| — продольный и поперечный при работе | 2 |
| Среднее давление на грунт, кПа: | |
| — при работе | 58,5 |
| — при шагании | 107,8 |
| Скорость, м/с | 0,133 |
| Наибольший радиус копания и разгрузки, м | 43,5 |
| Максимальная высота разгрузки, м | 22,0 |
| Наибольшая глубина копания, м | 19,5 |
| Масса экскаватора, кг | 278000 |
Имеется в наличии:
Экскаватор шагающий ЭШ 6/45 1986 года выпуска, после капитального ремонта.
По вопросам приобретения обращайтесь в отдел продаж.
Электропривод карьерного экскаватора – Основные средства
В карьерных экскаваторах типа ЭКГ или ЭШ используется большое количество систем, разнообразных по назначению и принципу работы. Практически все известные на сегодня схемы преобразования энергии, такие как гидравлика, пневматика, электропривод, электроника, нашли применение на этих машинах. Первичной и главной ступенью преобразования энергии – а в современных тяжелых экскаваторах это электрическая энергия, поступающая в экскаватор через высоковольтную питающую цепь, – является электропривод.
Эволюция электропривода карьерных экскаваторов за последние тридцать лет привнесла некоторые изменения в конструкцию, но по-настоящему новых принципиальных решений, уже внедренных на «живых» машинах, мало.
Классически для привода главных механизмов применяются двигатели постоянного тока с независимым возбуждением, питаемые от регулируемых генераторов (система Г–Д) или регулируемых статических тиристорных преобразователей (система ТП–Д).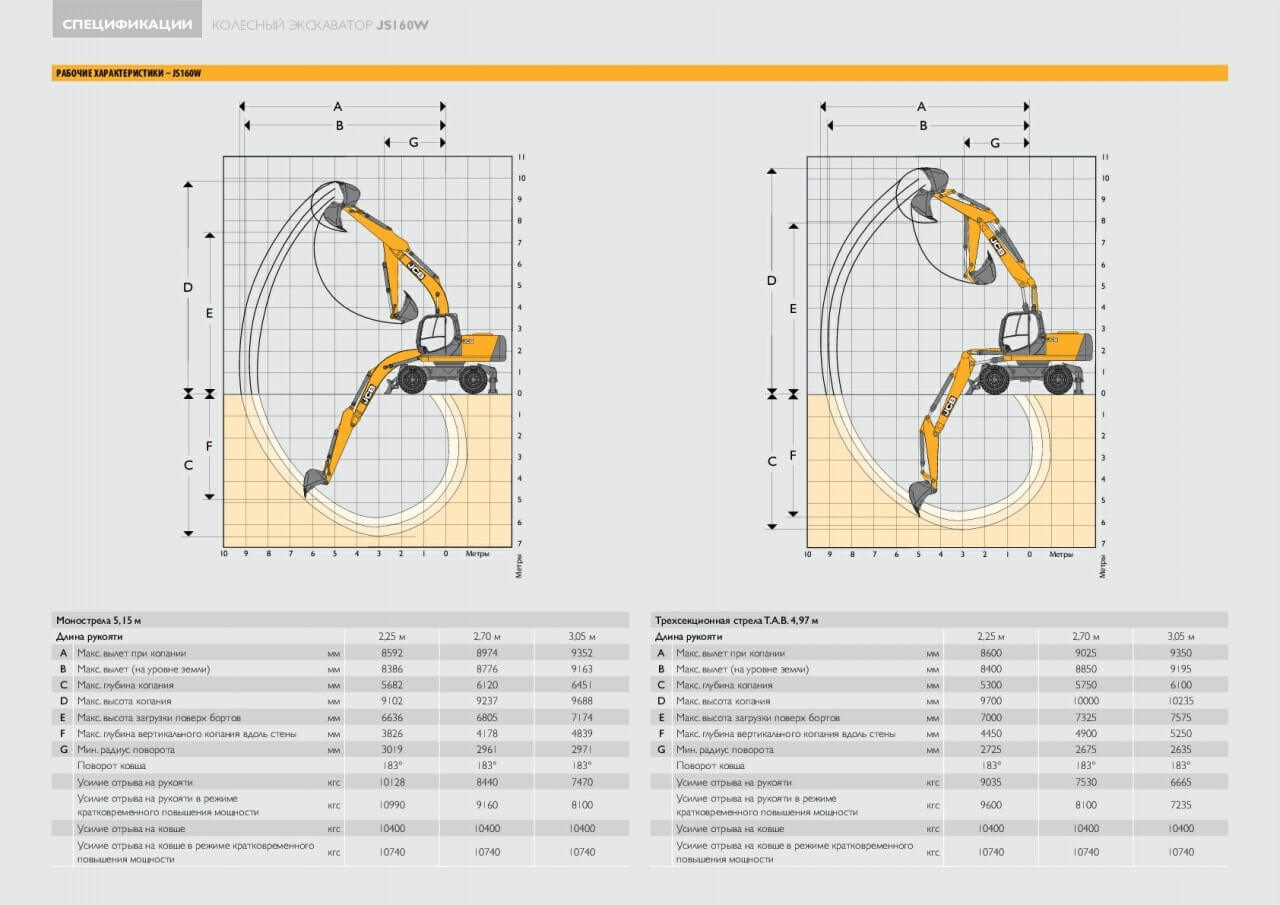
Двигатель с экскаваторной (саморазгружающейся) характеристикой подразумевает работу с номинальной частотой вращения вплоть до стопорного максимального момента, по достижении которого двигатель останавливается, но не теряет усилие на приводном валу. То есть когда, к примеру, груженый ковш упирается в неподвижный массив и усилия, развиваемого подъемной лебедкой, недостаточно для внедрения ковша, не должно происходить «опрокидывание» двигателя, т. е. падение оборотов и снижение момента на валу двигателя. Для сохранения наибольшей производительности экскаватора желательно, чтобы двигатель работал с постоянной наибольшей частотой вращения до момента начала стопорения (наибольшей нагрузки). Это означает, что механическая характеристика (зависимость частоты вращения от момента на валу двигателя) должна быть жесткой, состоять из рабочего участка с минимальной линейной зависимостью частоты вращения от момента и нерабочего участка, соответствующего падению частоты вращения при максимальном моменте стопорения. К такому экскаваторному режиму наиболее близок режим работы двигателей постоянного тока.
К такому экскаваторному режиму наиболее близок режим работы двигателей постоянного тока.
Из школьного курса все знают, что обмотка возбуждения двигателя постоянного тока в виде главных магнитных полюсов располагается в статоре, на обмотку якоря (ротора) ток поступает через щетки и коллектор – аппарат, который преобразует постоянную э.д.с. питающей сети в переменную э.д.с. обмотки якоря.
Регулирование частоты вращения двигателя постоянного тока возможно тремя способами: изменением сопротивления обмотки якоря, подводимого напряжения или потока возбуждения (тока возбуждения). Изменение сопротивления обмотки якоря для регулирования невыгодно, так как не экономично и сильно смягчает механическую характеристику. Регулирование изменением потока возбуждения применимо при малых моментах нагрузки. Момент двигателя прямо пропорционален потоку возбуждения, а кроме того, обрыв в цепи возбуждения может привести к работе двигателя вразнос при отсутствии значимой нагрузки на валу, так как частота вращения обратно пропорциональна потоку возбуждения.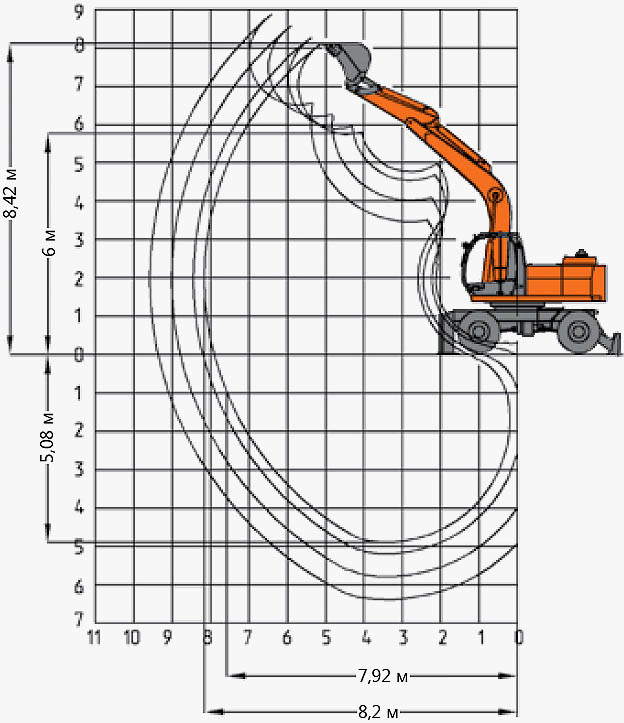
Регулирование частоты вращения изменением питающего напряжения требует источника с регулируемым напряжением.
Питание двигателей постоянного тока (главных приводов экскаватора) долгий период времени осуществлялось от генераторов постоянного тока (система Г–Д). Это достаточно надежная и простая в управлении система электропривода, она используется уже много десятилетий в приводах карьерных экскаваторов.
В простейшей системе Г–Д изменение питающего напряжения (выходного напряжения генератора) происходит путем изменения тока возбуждения в независимой обмотке возбуждения генератора (например, с помощью реостата в цепи возбуждения). Снижение питающего напряжения приводит к снижению частоты вращения двигателя при сохранении рабочего момента и жесткости рабочих характеристик (справедливо для двигателей с независимым и параллельным возбуждением).
Для привода генераторов используется сетевой двигатель. Обычно преобразовательный агрегат включает в себя один или несколько сетевых двигателей, которые вращают генераторы. Каждый генератор обеспечивает привод соответствующего механизма – привод подъема, напора (тяги для драглайнов), поворота, хода, открытия днища ковша (для ЭКГ). В агрегат может входить генератор собственных нужд, питающий постоянным током обмотки возбуждения двигателей и генераторов. В качестве сетевого двигателя используются мощные асинхронные (ЭКГ-5А) или синхронные двигатели переменного тока (ЭКГ-10, ЭКГ-15, ЭШ-11.70 и т. д.).
Каждый генератор обеспечивает привод соответствующего механизма – привод подъема, напора (тяги для драглайнов), поворота, хода, открытия днища ковша (для ЭКГ). В агрегат может входить генератор собственных нужд, питающий постоянным током обмотки возбуждения двигателей и генераторов. В качестве сетевого двигателя используются мощные асинхронные (ЭКГ-5А) или синхронные двигатели переменного тока (ЭКГ-10, ЭКГ-15, ЭШ-11.70 и т. д.).
Индивидуальный привод основных механизмов автоматизирован. Машинист управляет только частотой вращения и проводит реверсирование двигателя в процессе копания. Остальные процессы регулирования (стабилизация частоты вращения и ограничение предельной нагрузки, формирование экскаваторной характеристики) происходят автоматически. В основу принципа автоматизации управления отдельного механизма положена специальная система автоматического регулирования (САР). Регулятором здесь выступает силовой магнитный усилитель (он заменяет управляющий реостат в цепи возбуждения в простейшей схеме). В САР генератор является одновременно усилительным и исполнительным элементом, двигатель – объектом регулирования, а регулируемой величиной является частота вращения двигателя. При управлении машинист, желая установить определенную частоту двигателя, воздействует на цепь возбуждения генератора, т. е. изменяет величину тока в его обмотке возбуждения посредством командоконтроллера. Для поддержания заданного режима в САР присутствует обратная связь, обеспечивающая корректирующее воздействие на магнитные усилители и далее на ток в цепи возбуждения генератора.
В САР генератор является одновременно усилительным и исполнительным элементом, двигатель – объектом регулирования, а регулируемой величиной является частота вращения двигателя. При управлении машинист, желая установить определенную частоту двигателя, воздействует на цепь возбуждения генератора, т. е. изменяет величину тока в его обмотке возбуждения посредством командоконтроллера. Для поддержания заданного режима в САР присутствует обратная связь, обеспечивающая корректирующее воздействие на магнитные усилители и далее на ток в цепи возбуждения генератора.
Более прогрессивной считается схема, в которой питание обмотки возбуждения генератора (двигателя) осуществляется посредством тиристорного преобразователя. При такой схеме не требуется задействовать генератор собственных нужд, призванный питать обмотки возбуждения электромашин и привода малой мощности (открытия днища ковша). Основными преимуществами тиристорных возбудителей являются малая инерционность и более высокий к.п.д. по сравнению с силовыми магнитными усилителями.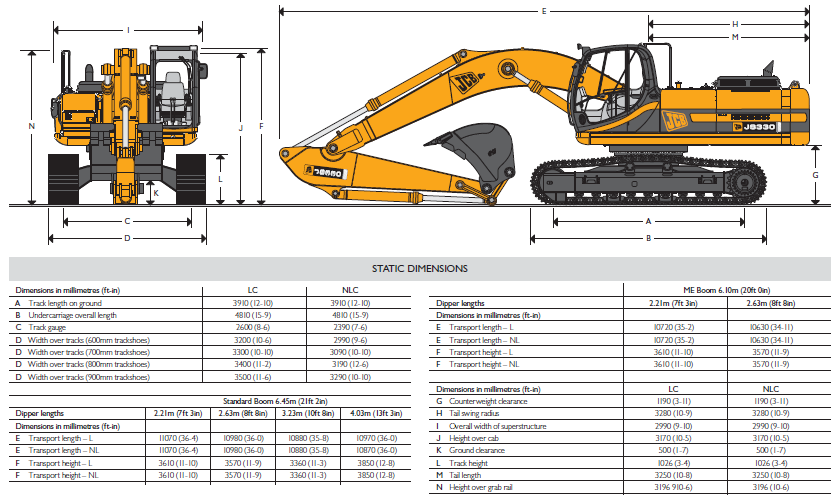 Тиристор преобразует переменный ток в постоянный с регулированием выпрямленного напряжения. Ток управления тиристора регулируется сельсинным командоаппаратом.
Тиристор преобразует переменный ток в постоянный с регулированием выпрямленного напряжения. Ток управления тиристора регулируется сельсинным командоаппаратом.
Второй способ – использовать вместо генератора тиристорный преобразователь (ТП–Д). Однако использование силовых тиристорных преобразователей для электропривода главных приводов приводит к снижению коэффициента мощности энергетической установки экскаватора, появлению дополнительных гармоник и колебаний напряжения в сети, что снижает качество электроснабжения карьера. Чтобы уменьшить негативное влияние работы ТП на сеть, на экскаваторах используются фильтрокомпенсирующие устройства. В бывшем СССР схема ТП–Д была обкатана на ЭКГ-20.
Другим перспективным направлением является применение импульсного способа изменения какого-либо параметра двигателя – напряжения, сопротивления в цепях статора или ротора. Изменяя длительность импульса, достигают изменения средней частоты вращения.
Асинхронные двигатели, питаемые от регулируемых статических преобразователей частоты (ПЧ–АС), применяют в электроприводе начиная с 1970-х годов. Асинхронные электродвигатели благодаря простоте производства и надежности в эксплуатации широко используют в нерегулируемом электроприводе. Основные их недостатки – ограниченный диапазон регулирования частоты вращения и значительное потребление реактивной мощности.
Асинхронные электродвигатели благодаря простоте производства и надежности в эксплуатации широко используют в нерегулируемом электроприводе. Основные их недостатки – ограниченный диапазон регулирования частоты вращения и значительное потребление реактивной мощности.
- плавно регулировать скорость вращения асинхронного электродвигателя при сохранении момента на валу;
- снизить потребление электроэнергии на 30…50% за счет оптимального управления электродвигателем в зависимости от нагрузки;
- осуществлять плавный пуск электродвигателя с током, не превышающим номинального значения для электродвигателя;
- устранить пиковые нагрузки на электросеть и просадки напряжения в ней в момент пуска электропривода.
Частотные преобразователи создают определенные электромагнитные помехи, для уменьшения которых необходимо применять дополнительные фильтры. Для работы на низких частотах требуется эффективное принудительное охлаждение. Другой аспект – трудность обеспечения экскаваторной механической характеристики. В процессе работы экскаватора нагрузочные моменты могут меняться в значительной степени за короткие промежутки времени от максимальных моментов, способных «опрокинуть» двигатель, до минимальных. Поэтому требуется автоматическая одновременная регулировка частоты и питающего напряжения, поступающего на обмотку статора.
В процессе работы экскаватора нагрузочные моменты могут меняться в значительной степени за короткие промежутки времени от максимальных моментов, способных «опрокинуть» двигатель, до минимальных. Поэтому требуется автоматическая одновременная регулировка частоты и питающего напряжения, поступающего на обмотку статора.
Несмотря на высокую перспективность системы ПЧ–АС, массового и быстрого внедрения на экскаваторах в России она до сих пор не получила. Здесь сказывается и определенный общий провал 1990-х годов в промышленности, и необходимость внедрять новые решения в системах автоматического регулирования. Работоспособность системы ПЧ–АС неоднократно доказана, в том числе при эксплуатации модернизированного экскаватора ЭШ-20.90 на Сафроновском разрезе (Иркутская обл.).
Вопросов при использовании системы ПЧ–АС возникает много, для краткого их обзора потребуется отдельная публикация.
Сегодня мировые лидеры производства электрических экскаваторов, такие как Bucyrus International Inc. с входящими в ее состав Marion и Ransomes-Rapier, а также P&H предлагают экскаваторы с электроприводом, выполненным по разным схемам – ПЧ–АС, Г–Д, ТП–Д. Выбор системы остается за заказчиком.
с входящими в ее состав Marion и Ransomes-Rapier, а также P&H предлагают экскаваторы с электроприводом, выполненным по разным схемам – ПЧ–АС, Г–Д, ТП–Д. Выбор системы остается за заказчиком.
Характеристики одноковшовых экскаваторов: прямая лопата, обратная лопата, драглайн. Прямая лопата Прямая лопата — рабочее оборудование для разработки (копания) грунта выше уровня стоянки экскаватора. Копают грунт в направлении от экскаватора. Прямая лопата обеспечивает наибольшее усилие копания и наибольшую производительность (за счёт минимального количества операций в одном цикле копания). Применяется для добычи полезных ископаемых и погрузочных работ. Обратная лопата Обратная лопата — основное рабочее оборудование для разработки (копания) грунта ниже уровня стоянки экскаватора. Драглайн Драглайн — рабочее оборудование с ковшом, гибко подвешенным на канатах. Применяется для разработки грунта ниже уровня стоянки экскаватора. Грунт копают в направлении к экскаватору. Применяется при разработке котлованов, отсыпки насыпей, добычи полезных ископаемых, дноуглубительных работ на водоёмах. Драглайн имеет наибольшие радиус и глубину копания, а также наибольшую погрузочную высоту по сравнению с другими типами рабочего оборудования. Для работы с драглайном гидравлического экскаватора на него устанавливают двухбарабанную главную лебедку с приводом от гидросистемы. Характеристики одноковшовых экскаваторов
При разработке грунта экскаваторами наименьшая ширина должна приниматься по ширине режущей кромки рабочего органа землеройной машины с добавлением в песчаных и супесчаных грунтах 0,15 м. | |||||
 Применяется при копании котлованов, траншей, при планировании откосов и отсыпке насыпей. Может применяться для погрузочных работ. При работе обратной лопатой грунт копают в направлении к экскаватору. Гидравлические экскаваторы с обратной лопатой могут разрабатывать грунт и выше уровня своей стоянки, правда с меньшей эффективностью чем прямая лопата.
Применяется при копании котлованов, траншей, при планировании откосов и отсыпке насыпей. Может применяться для погрузочных работ. При работе обратной лопатой грунт копают в направлении к экскаватору. Гидравлические экскаваторы с обратной лопатой могут разрабатывать грунт и выше уровня своей стоянки, правда с меньшей эффективностью чем прямая лопата. Переоборудования базовой машины механического экскаватора при работе драглайном не требуется.
Переоборудования базовой машины механического экскаватора при работе драглайном не требуется. , а в глинистых и суглинистых — 0,1 м.
, а в глинистых и суглинистых — 0,1 м.Что такое экскаватор? Обзор и технические характеристики экскаваторов. Типы экскаваторов по принципу действия
Увеличение количества собственников земельных участков вызвало спрос на различные механизмы, способные работать на относительно небольшой площади. Использовать обычные, габаритные машины достаточно сложно, а в ряде случаев и нецелесообразно. Это вызвано не только самой высокой стоимостью услуг (или аренды техники), но и рядом других причин — невозможностью подъезда к месту работы без дополнительной подготовки, ограничением в маневренности, риском повреждения насаждений. и тому подобное.
В отрасли налажен выпуск многих изображений категории «мини», в основном предназначенных для частного сектора, хотя они не менее привлекательны для городских служб, небольших фермерских хозяйств или специализированных структур малого бизнеса. Но если такие агрегаты, как культиватор, снегоуборщик малых размеров уже ни для кого не новость, то о мини-экскаваторах отечественного производства слышали немногие.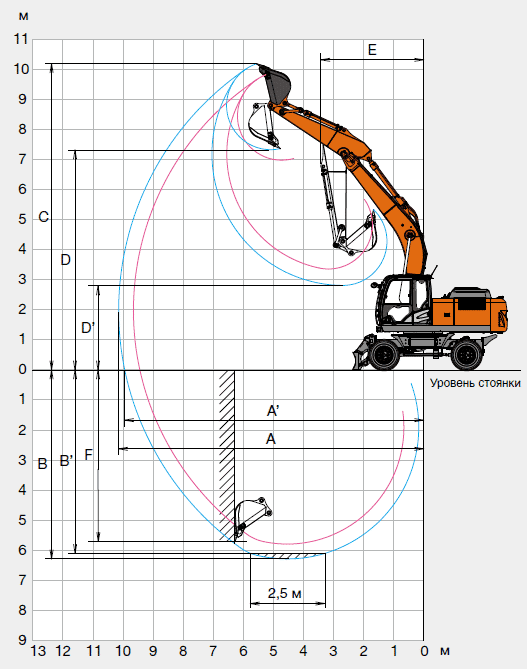 Но если разобраться с их функциональностью и многофункциональностью в использовании, они вызовут неподдельный интерес у большинства «частников».
Но если разобраться с их функциональностью и многофункциональностью в использовании, они вызовут неподдельный интерес у большинства «частников».
Применение (базовые опции)
Мини-экскаваторы – машины универсальные, но читателей, как правило, больше волнуют вопросы бытового применения техники. На этом и делаем акцент.
Раскопки. Виды работ, с которыми приходится сталкиваться владельцу гектара, самые разные – подготовка котлована или траншеи под фундамент (под септик, колодец, прокладки инженерных коммуникаций), отверстия под столбы (опоры) и так далее. .
Бурение.Например, при устройстве забора жидкости из скважины.
Выравнивание сайта. Если вы получили отходы, то это, вероятно, придется сделать. Сложный рельеф, а значит, и перспектива закрыть ступенчатый ландшафт мало кого привлекает. А любителям экзотики такой мини-экскаватор будет еще и хорошим помощником.
Перемещение груза. Например, доставка раствора из бетономешалки к опалубке, вывоз с площадки строительного мусора или вырезанного грунта — ситуации в быту, когда ручной труд малоэффективен, возникают довольно часто.
Демонтаж (полный или частичный) малых зданий. Такая необходимость часто возникает, если постройка предназначена под снос или готовится ее реконструкция (переделка) при покупке уже обязывающего земельного участка, когда прежняя планировка не устраивает новых владельцев.
Краткий обзор российских мини-экскаваторов
Рассматривать все представленные на рынке модели нет смысла. Причины две.
Во-первых, отечественных производителей, к сожалению, не так много (следствие постпереносов и развала отрасли).Что касается класса «мини», то здесь еще сложнее. Поэтому почти все, что есть в продаже — импорт, агрегаты из ближнего (Белоруссия) и дальнего зарубежья (Германия, Китай и ряд других стран).
Во-вторых, даже одна конкретная модель всегда выпускается в различной комплектации, что несколько меняет функционал базового образца и расширяет возможности его использования.
Поэтому в качестве примера рассмотрим серийного производителя этой техники в России. Это не реклама, и по словам автора, на сегодняшний день это единственный оптимальный вариант малогабаритного экскаватора, который можно эффективно использовать в частном секторе, тем более, что его цена вполне доступна, чего нельзя сказать об иностранных модели.Если вас, уважаемый читатель, эти модели всерьез заинтересуют, то на сайте производителя найти более подробную и развернутую информацию не составит труда.
Это не реклама, и по словам автора, на сегодняшний день это единственный оптимальный вариант малогабаритного экскаватора, который можно эффективно использовать в частном секторе, тем более, что его цена вполне доступна, чего нельзя сказать об иностранных модели.Если вас, уважаемый читатель, эти модели всерьез заинтересуют, то на сайте производителя найти более подробную и развернутую информацию не составит труда.
«Геогид»
Производитель — Машиностроительный холдинг «Партнер» (Челябинск).
Модель «15G»
На самом деле это не самообесценивающаяся машина, а прицеп. Этот вариант особенно привлекателен для владельцев небольших участков (загородный дом, дача и так далее).
Двигатель (бензин) на 15 «лошадей» позволяет копать траншею (скатную) глубиной до 1.5 и поднять груз на 1,8 (м). Линейные параметры машины – 284 х 125,5 х 238 (см), масса – 0,75 тонны. Бустер поворачивается влево-вправо на 450.
Базовая цена — от 275 000 руб.
Модель «20G»
Доступен в 3 классах (базовый, премиум, стандартный). Существенная разница заключается в уровне контроля и возможностях дополнительной оснастки. Бензиновый двигатель; Как видно из обозначения, на 20 «лошадок». Масса машины — от 2,2 до 2, 35 тонн.Следовательно, воздействие на почву не больше, чем от обычного «автомобиля».
Размеры также соответствуют определению «мини» — 345 х 155 х 353 см (значения округлены). Объем ковша от 0,4 до 0,5 м3, ширина — 30 см. Такой экскаватор может быть оснащен глубиной до 3 м и поднимать груз на 2,5 – 3,3 м (в зависимости от модификации).
«Премиум»
Все экскаваторы предусматривают установку доп/оборудования (отвала, например), для чего монтируются соответствующие элементы гидравлики.Подключение осуществляется в течение нескольких минут.
Цена — от 545 000 руб.
Модификация «20Д» отличается только двигателем. Он мощнее, на 27 л.
 с. Соответственно и цена выше — от 640 000 руб.
с. Соответственно и цена выше — от 640 000 руб.Модель «60 ДЦ-П»
Гораздо мощнее; Двигатель в 60 л.с. Габариты и вес несколько больше — 360 х 126 х 350 и 2,4 тонны. Высота ковша 330 см.
Цена — от 1 055 000 руб.
Список довольно скромный, но отечественные мини-экскаваторы вполне обеспечивают земляные работы в частном секторе.А если подумать, то наши машины предпочтительнее. Обоснований этому заявлению несколько.
- Во-первых, вполне доступные цены.
- Во-вторых, надежность. Российские агрегаты разработаны с учетом всех особенностей нашего климата, адаптированы к местным условиям. Что касается импортных моделей, то они более «капризны».
- В-третьих, проблем с зап/деталью и их доставкой, как правило, не бывает.
Информации достаточно, чтобы понять целесообразность покупки и определиться с оптимальным вариантом мини-экскаватора.
Любое строительство, а тем более прокладка трубопровода немыслимы без применения экскаватора. С того дня, как стали производиться земляные работы, строительная мысль работала в направлении повышения производительности этого процесса.
С того дня, как стали производиться земляные работы, строительная мысль работала в направлении повышения производительности этого процесса.
Подробнее Леонардо Винчи сделал первые рисунки Драгунка Драглинга. В 1776 году был применен паровой привод, созданный при участии Джеймса Уатта. В 1809 году в Петербурге был построен первый плавучий экскаватор, а в 1812 году идея была реализована на Ижорском заводе, это был первый многоцветковый экскаватор.Во второй половине 20 века активно внедрялись новые инженерные технологии и оборудование (гидравлический двигатель и др.).
Производство экскаваторов в нашей стране начинается в 1930-х годах, одним из первых был завод в Иваново, работавший под маркой Кранкс. Сейчас в России существует несколько десятков предприятий, собирающих экскаваторы различного назначения.
Самые распространенные экскаваторы занимаются копанием грунта и погрузкой сыпучих материалов. Для приспособления таких экскаваторов к максимальному количеству задач предусмотрена возможность смены навесного оборудования. Так, современный экскаватор, за счет дополнительного оборудования, может применяться и для рыхления особо твердых грунтов, и для демонтажа конструкций разной прочности. В целях обеспечения маневренности и многофункциональности применяют одноразмерные экскаваторы, но в условиях, когда нужна наибольшая производительность, используют многоцелевые экскаваторы. Как правило, они предназначены для стационарных условий, например, для работы в карьерах.
Так, современный экскаватор, за счет дополнительного оборудования, может применяться и для рыхления особо твердых грунтов, и для демонтажа конструкций разной прочности. В целях обеспечения маневренности и многофункциональности применяют одноразмерные экскаваторы, но в условиях, когда нужна наибольшая производительность, используют многоцелевые экскаваторы. Как правило, они предназначены для стационарных условий, например, для работы в карьерах.
Многоцелевой экскаватор
В зависимости от условий работы используются разные типы ходовой части.Традиционные гусеничные и автомобильные шасси в особых условиях заменяют плавучими, рельсовыми и шагающими, а также используют сочетание разных типов шасси.
Экскаватор на шагающем шасси
Помимо широко распространенных моделей экскаваторов в отдельных областях промышленности возникает потребность в создании специфических машин. Например, подземные экскаваторы, используемые для подземной добычи полезных ископаемых с высокой плотностью пород, или тоннели, используемые для погрузки пород с дефектами.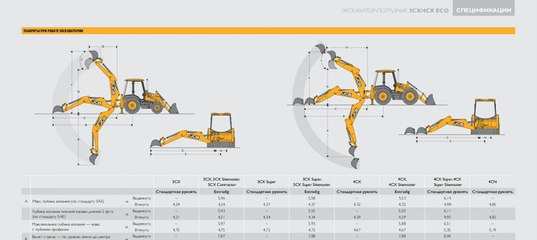
Подземный экскаватор
Постоянными критериями улучшения экскаваторов является снижение энергопотребления с одной стороны, а с другой стороны увеличение мощности и производительности.Также идет поиск возможностей для создания более универсальных машин.
Российское машиностроение сегодня имеет значительный опыт строительства землеройных машин. Ведущие предприятия стараются создавать образцы, конкурентоспособные на мировом рынке. Зачастую эти задачи решаются путем комплектации импортных систем, что в итоге приводит к удорожанию эксплуатации оборудования, а также внедряются и полностью отечественные современные инженерные решения. Например, тренерская компания с 2006 года выпускает модель EK 450 FS с ковшом прямолопатного типа.
Прямой ковш
По сравнению с обычным ковшом, «прямая лопата» позволяет экскаватору производить работу, которую обычно выполняют три разные единицы строительной техники — «классический» экскаватор, фронтальный погрузчик и, при определенных условиях, бульдозер.
В настоящее время в связи с возможным запретом на ввоз современной строительной техники многие российские предприятия взяли курс на выпуск отечественной продукции, не уступающей по своим характеристикам зарубежной продукции.Время покажет, готовы ли наши производители к импортозамещению, готовы ли они более активно завоевывать внутренние и экспортные рынки в условиях низкого курса рубля – это вопросы, ответы на которые мы узнаем в ближайшее время. будущее, ведь ни для кого не секрет, что продавцы хотели бы покупать оборудование российских производителей, просто будучи уверенными, что это лучший выбор.
Добыча угля, марганца, руд, содержащих металлы, другие полезные ископаемые связана с перемещением больших объемов горных пород, буровзрывными работами и производится круглогодично.Для этого тяжелого во всех смыслах нужна соответствующая техника. Вскрытие залежей и последующая выемка полезных ископаемых с последующей погрузкой на специальный автомобиль или ж/д транспорт Специализированный тип экскаваторов — карьерные.
Как понятно из названия карьерные экскаваторы используются, добывая полезные ископаемые в открытых разработках, выполняя ночные работы. Эти машины разработаны с учетом эксплуатации в самых различных, в том числе тяжелых, климатических условиях, с различными типами грунтов, предназначены для интенсивной эксплуатации.Без таких экскаваторов не обойтись на горных выработках в угольной промышленности, на добыче строительных пород, в цветной и черной металлургии.
Мощность, приспособленность к длительной, в том числе круглосуточной, работе, высокий КПД, возможность использования электроэнергии для функционирования такой техники — отличительная черта данных землеройных механизмов.
Устройство
Современный карьерный экскаватор состоит из ряда функционально законченных конструктивных узлов, позволяющих эффективно их обслуживать и ремонтировать.Могут быть предоставлены следующие функциональные части:
- Рама с гусеницами.
- Стойка на двух ножках.
- Нижняя рама.
- Поворотная платформа.
- Кузов.
- Стрела с рукояткой.
- Ковш.
Большое внимание уделяется рабочему месту оператора. В кабинах установлены хороший обзор, вибро- и звукоизоляция, системы отопления и кондиционирования воздуха, эргономичные органы управления, системы контроля работоспособности экскаватора.
Классификация
Карьерные экскаваторы можно классифицировать по таким признакам:
- Тип шасси: Гусеничное, шагающее.
- Принцип действия: циклического действия (одноконтурный) и непрерывного действия (вращательный).
- Тип используемого двигателя: дизельный, электрический, одномоторный или многомоторный.
- Тип привода: гидравлический, гидромеханический, механический, электрический и др.
При выборе принято руководствоваться принципом, который оптимален — загружать карьерный самосвал за 4-6 рабочих циклов используемого экскаватора.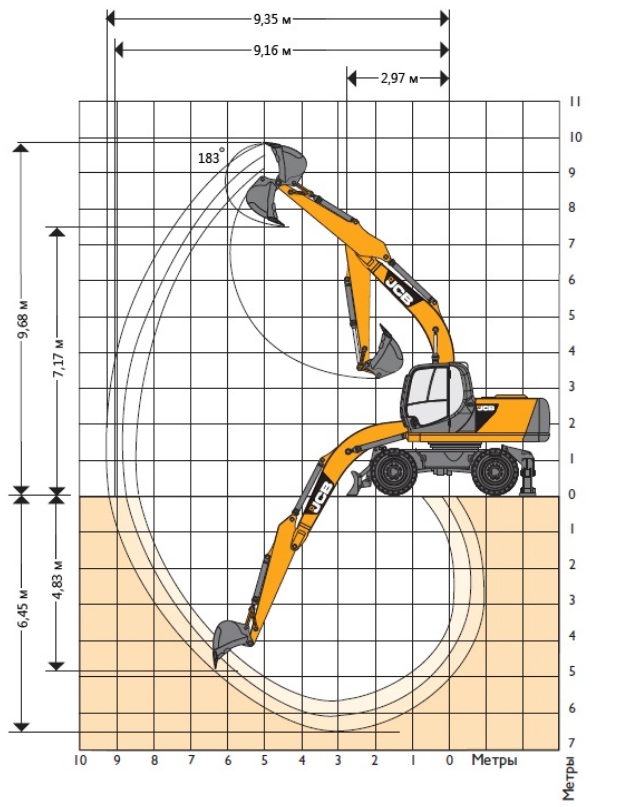
Гусеничный
Экскаваторы данного типа делятся на несколько типов по количеству гусениц, установленных на платформе: двух-, четырех- и восьмимерные. В качестве рабочих органов применяют ковши оборотные или прямые вместимостью до 50 м3 и более.
Фото Гусеничный карьерный экскаватор
Ротор
Эти экскаваторы могут быть гусеничными или шагающими. На конце стрелы находится поворотное поворотное колесо, на котором закреплены ковши.Объем каждого из них может достигать 6 м3. Сама стрелка может быть как выдвижной, так и нечувствительной. Поворотные и отвальные стрелы могут подниматься и опускаться. Дальность действия при разработке пород до 50 м и до 25 м в глубину.
Экскаватор карьерный роторный
В движение такой экскаватор приводится электродвигателем.
Гидравлический
Это один из наиболее распространенных видов землеройной техники, применяемой при добыче руд, полезных ископаемых в карьерах. Эти машины используются для погрузки пород в транспорт.
Эти машины используются для погрузки пород в транспорт.
Экскаваторы этого типа комплектуются камышами прямого и обратного типа. Устанавливаются дизельные двигатели или электродвигатели.
Экскаватор карьерный гидравлический
Ходьба
Этот тип экскаваторов часто можно встретить в ночных работах, в большинстве случаев они оснащены драглинами. Свое название — ходьба — получил от способа передвижения. В рабочем положении экскаватор контактирует с грунтом при помощи опорной рамы.При необходимости смены местоположения опорные «лыжи» выдвигаются, экскаватор поднимается на гидроштоках, перемещается на определенное расстояние (делает «шаг») и снова опускается на раму.
Шагающий карьерный экскаватор
Учитывая большой вес таких механизмов до сотен и тысяч тонн, такая конструкция позволяет добиться низкого напорного давления на грунт, что было бы неосуществимо при использовании гусеничного движителя. Длина стрелы может достигать 100 м, а объем ковша — превышать 100 м3.
Популярные модели
Выпуск карьерной техники Есть несколько известных зарубежных производителей. Подобные автомобили выпускает и Россия. Среди лидеров по производству техники для работы в открытом поле Hitachi и Caterpillar. Вот краткие характеристики Современные популярные модели этих марок.
Хитачи
Hitachi Sales Company Карьерные экскаваторы Он является лидером на мировом рынке. В модельном ряду — двухсекционные гидромашины с объемом ковша от 1.от 15 до 43 м3. Некоторые характеристики модели приведены в таблице.
| Модель | ZX470-5G. | ZX670-5G. | ZX870-5G. | EX1200-6. | EX1900-6 |
| Двигатель | Исузу АА-6WG1XQA | ИСУЗУ ББ-6ВГ1СККА | ИСУЗУ ББ-6ВГ1 СКА-04 | Камминз QSK23-C | Кумминз QSKTA38-CE |
| Мощность двигателя, кВт. | 235 | 312 | 360 | 567 | 810 |
Масса, кг. | 45600 — 47800 | 66800 — 68200 | 80800 — 84200 | 114 000 | 191 000 |
| Тип ковша | Спина | Обратный/прямой | |||
| Вместимость ковша, м3 | 1,15 — 2,65 | 2,5 — 3,5 | 2,9 — 4,5 | 5.2 — 6,7 | 4,4-12/11,0-15,0 |
| Глубина копания, мм | 5920 — 9230 | 7120 — 9150 | 7140 — 8870 | 8050 — 9380 | 8180-14430/5920 |
| Высота копания, мм | 10130 — 11420 | 11190 — 12240 | 12010 — 13820 | 12410 — 13460 | 14140-17900/14610 |
| Высота разгрузки, мм | 6900 — 8390 | 7330 — 8330 | 8130 — 9740 | 8050 — 9080 | 9060-13200/10440 |
| Длина стрелы, м | 6.3, 7 | 6,8, 7,8 | 7. 1, 8.4 1, 8.4 | 7,55, 9 | 8.3 |
| Длина ручки, м | 2,5-4,9 | 2,9-4,2 | 2,95-4,4 | 3.4, 3.6 | 3,6 |
| Усилие на ковше, кН | 238,0 — 286,0 | 324,0 — 369,0 | 399,0 — 472,0 | 569 | 671/660-612 |
Продолжение таблицы
| Модель | EX2600-6 | EX3600-6 | EX5500-6 | EX8000-6 |
| Двигатель | Кумминз QSKTA50-C | Кумминз QSKTA60-CE | Кумминз QSKT50-CE | Кумминз QSKT60-CE |
| Мощность двигателя, кВт. | 1119 | 1450 | 1119×2 | 1450×2. |
| Масса, кг. | 252 000 — 254 000 | 361 000 | 537 000/533 000 | 837000/825000 |
| Тип ковша | Обратный/прямой | |||
| Вместимость ковша, м3 | 17,0/15,0 | 22/21-23 | 34/27-29 | 38-43/40 |
| Глубина копания, мм | 3720/8250 | 8580/4160 | 8800/4550-4800 | 8400/4100 |
| Высота копания, мм | 15010/15800 | 17690/16560 | 19700/18900-19200 | 19000/20500 |
| Высота разгрузки, мм | 10350/10100 | 11590/10990 | 5200/13100 | 11900/13800 |
| Длина стрелы, м | 8.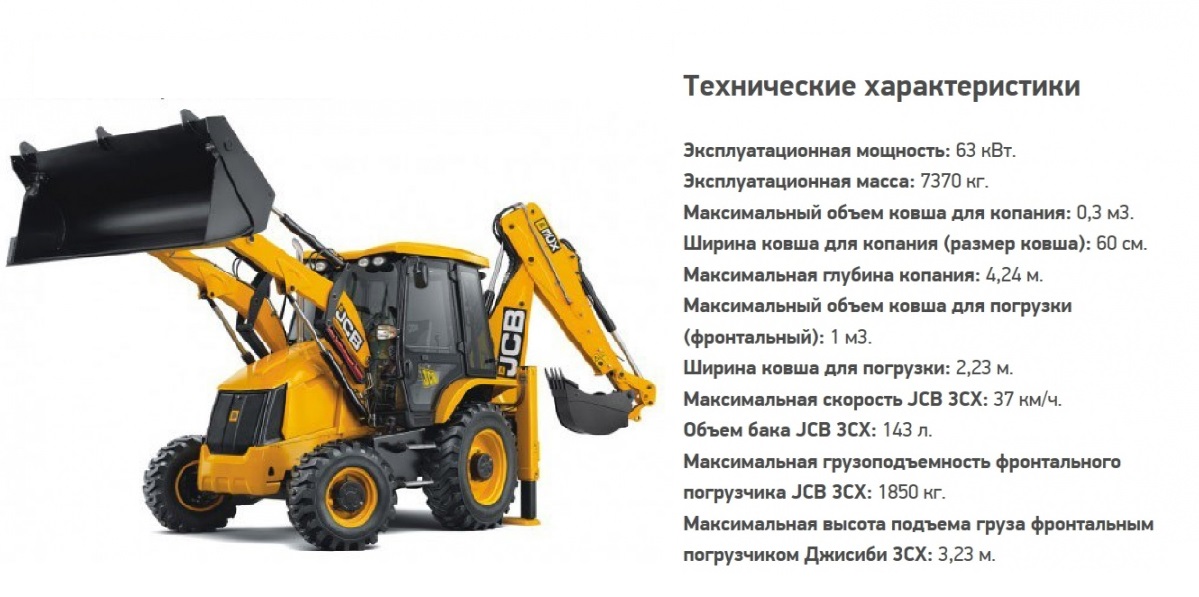 7 7 | 9,6 | 10.1 | 9,8 |
| Длина ручки, м | 3,9 | 4,5 | 5.0 | 6,26 |
| Усилие на ковше, кН | 830–760/ 943-873 | 1050 | 1480/1710-1590 | 2230 |
На модели EX3600-6, EX5500-6 и EX8000-6 кроме дизеля могут устанавливаться электродвигатели Hitachi TFOA-KK.
Традиционно для техники этой марки характерно использование экономичных и надежных двигателей, эффективной гидравлической системы.Большое внимание уделяется надежности и долговечности. поворотный узел. Помощь сохраняется в самом широком диапазоне внешних температур – а при +40? С, а при -50? стр.
Гусеница.
Для карьерных работ Caterpillar предлагает гидравлические экскаваторы разной мощности, а также канатные дороги, в которых используется электродвигатель.
Гидравлический
Приводим характеристики некоторых моделей.
| Модель | 340D L Серия 2 | 6015/6015ФС. | 6018/6018ФС. | 6030/6030ФС. | 6090фс. |
| Двигатель | Кат С9. | Cat C18 / Cummins QSK19 | 2 шт., кат. C18 | 2 шт., кат. C27 | 2 шт. Cummins QSK60 |
| Мощность двигателя, кВт | 200 | 522/477 | 858 | 1140 | 3360 |
| Масса, кг. | 38080 | 105600-107000 | 181000 | 296000/294000 | 980000 |
| Тип ковша | Спина | Обратный/прямой | Прямой | ||
| Вместимость ковша, м3 | 2.60, 2,69 | 4.6-7 | 10 | 17/16,5 | 37-52 |
| Глубина копания, мм | 7 322 | 7 300 | 8 500 | 13,9 | 20,2 |
| Длина стрелы, м | 6,18 — 6,50 | 7,3 – 7,8 | 9 | 6. 2 2 | 9,5 |
Электродвигатели могут быть установлены на модели 60xx вместо дизельных.
Кабель электрический
Несмотря на то, что гидравлические экскаваторы все чаще используются при работах в карьерах, продолжают выпускаться тросовые модели, позволяющие эффективно использовать их на сверхтоковых работах и добыче руды.
кабельный электрический карьерный экскаватор Cat 7295
За счет электропривода и токарных станков большой мощности позволяют перемещать значительные объемы грунтов, горных пород с малыми затратами.
В таблице приведены основные характеристики некоторых моделей:
Эффективная разработка месторождения напрямую зависит от качества и эффективности используемой методики.
Большой выбор карьерных экскаваторов позволяет выбрать нужную модель, учитывая тип горных пород, с которыми вам придется работать с использованием техники, условия эксплуатации и другие факторы.
На видео карьерный самосвал Hitachi:
Самый популярный вид строительной техники в городе. В настоящее время на российском рынке отечественными и зарубежными производителями представлен большой выбор колесных экскаваторов с различными техническими характеристиками и широким выбором навесного оборудования.В этой статье мы расскажем о самых активных участниках рынка среди зарубежных производителей колесных экскаваторов.
В отличие от своих гусеничных собратьев, отличающихся большей устойчивостью, колесные экскаваторы могут передвигаться на строительную площадку, не повреждая дорожное покрытие, и обладают высокой маневренностью. Именно эти преимущества делают колесные экскаваторы с популярным видом сейсмостойкого оборудования при строительстве в черте города. Не менее значительный спрос на эту технику и у дорожников при ямочном ремонте, ремонте бордюров и водостоков, для работ на дорогах.
В настоящее время рынок колесных экскаваторов импортного производства в России достаточно велик, но среди массы производителей свою нишу стабильно занимают несколько компаний. Наиболее известные игроки на рынке колесных экскаваторов: JCB, Hyundai, Daewoo, Hitachi. В последнее время наблюдается высокий интерес к этому сегменту и активно наращивают свое присутствие мировые гиганты, такие как Komatsu, Caterpillar, Volvo.
Наиболее известные игроки на рынке колесных экскаваторов: JCB, Hyundai, Daewoo, Hitachi. В последнее время наблюдается высокий интерес к этому сегменту и активно наращивают свое присутствие мировые гиганты, такие как Komatsu, Caterpillar, Volvo.
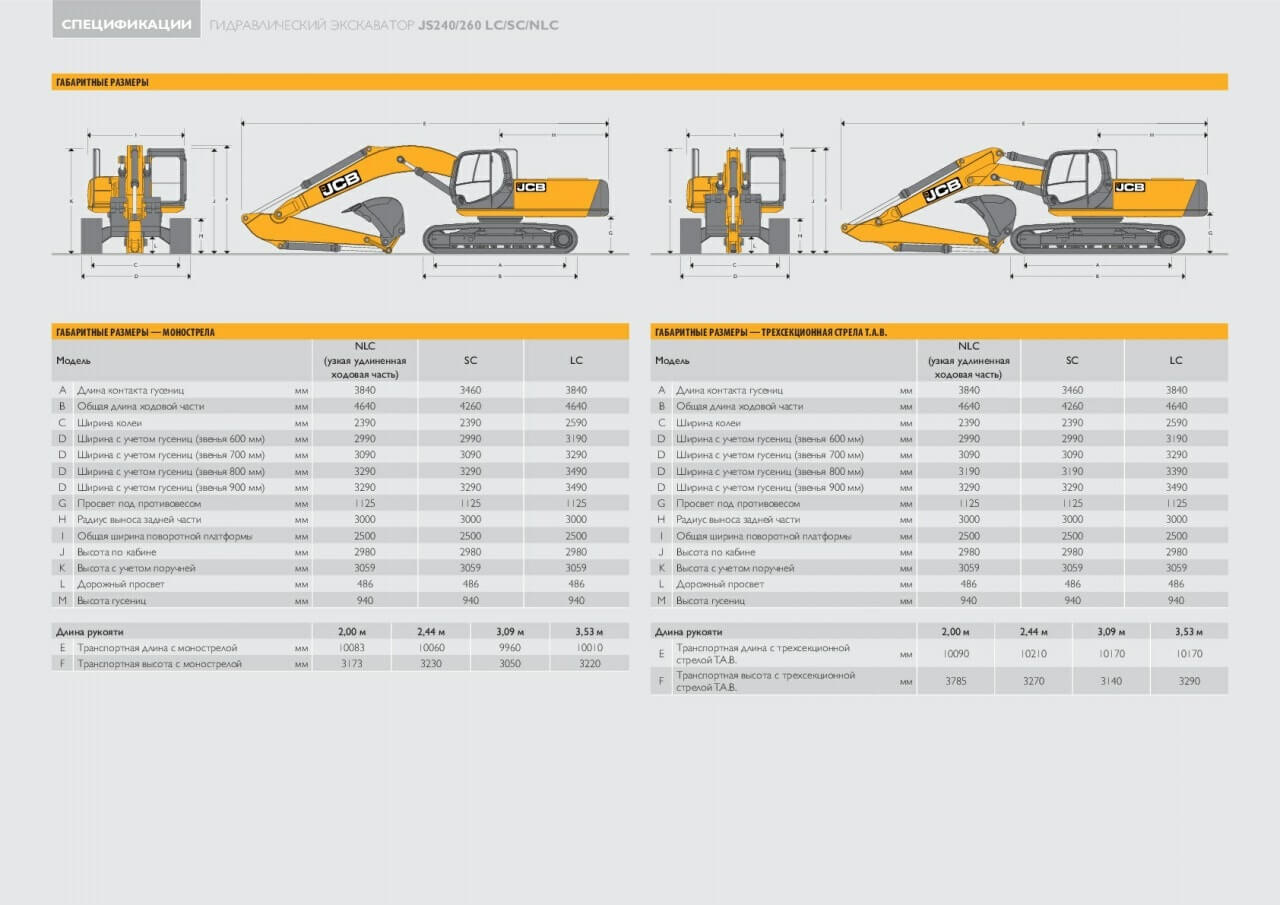
Прочные позиции на рынке колесных экскаваторов занимает компания JCB (Великобритания).Линейка колесных экскаваторов JCB представлена тремя моделями JC130W, JC160W, JC200W. Наибольшее распространение получил 16-тонный JS160W. 20-тонник js200w – машина уже более серьезная, способная заменить во многих случаях гусеничный экскаватор. Такой же массовый, производительный и мобильный был представлен потребителям относительно недавно.
Экскаваторы оснащены двигателями с турбонаддувом и гидравлическими системами с открытым центром. Двигатель управляется системой управления AMS, что обеспечивает требуемую мощность и хорошее управление.Кроме того, эти машины могут комплектоваться моноблочной или составной 3-х секционной стрелой.
Колесные экскаваторы JCB JC130W, JC160W и JC200W
Не менее сильные позиции в сегменте колесных экскаваторов в России занимают корейские производители.
 Среди них самые известные Hyundai и Daewoo. Hyundai представляет потребителям новую седьмую серию колесных экскаваторов R55W-7, R140W-7, R170W-7 и R200W-7 массой от 5,4 до 20,5 тонн. Самой малой массой среди колесных экскаваторов Hyundai можно считать модель R55W-7.Вес автомобиля всего 5 450 кг, объем ковша автомобиля до 0,18 куб. м. Самая крупная крупная модель – R200W-7, вес машины – 20 500 кг, объем ковша – до 1,34 куб.
Среди них самые известные Hyundai и Daewoo. Hyundai представляет потребителям новую седьмую серию колесных экскаваторов R55W-7, R140W-7, R170W-7 и R200W-7 массой от 5,4 до 20,5 тонн. Самой малой массой среди колесных экскаваторов Hyundai можно считать модель R55W-7.Вес автомобиля всего 5 450 кг, объем ковша автомобиля до 0,18 куб. м. Самая крупная крупная модель – R200W-7, вес машины – 20 500 кг, объем ковша – до 1,34 куб.Электронная система КАПО предусматривает три режима работы: тяжелый, стандартный и режим гидромолота, что позволяет оператору выбрать оптимальный режим, соответствующий условиям работы. Колесные экскаваторы Hyundai, как и большинство производителей широкого профиля, могут комплектоваться отвалом и выносными опорами в любом сочетании, а также предусмотрено несколько вариантов комплектации рабочего оборудования.
Колесные экскаваторы Hyundai R55W-7, R140W-7, R170W-7 и R200W-7
| Характеристика/модель | R55W-7. | R140W-7. | R170W-7. | R200W-7. |
|---|---|---|---|---|
| Эксплуатационная масса, т | 5,45 | 13,5 | 16,2 | 20,5 |
| Двигатель | Янмар 4TNV94L | Камминс Б3.9-С | Мицубиси С6С-ДТ | Камминс Б5.9-К |
| | 27 | 30 | 30 | 33 |
| Вместимость ковша, куб. м. | 0,06-0,18 | 0,23-0,71 | 0,39-1,05 | 0,51-1,34 |
Еще один корейский производитель Daewoo представляет пять моделей колесных экскаваторов.
 Серия Solar представлена моделями 55W-V, 140W-V, 160W-V, 180W-V, 210W-V эксплуатационной массой от 5,55 до 21,2 тонны. Электронная система управления колесом Daewoo содержит два режима работы: «режим копания» для работ, требующих значительных усилий на стрелах и экскаваторном оборудовании, и режим «траншей», при котором механизм поворота платформы активно задействован и требует значительной мощности.
Серия Solar представлена моделями 55W-V, 140W-V, 160W-V, 180W-V, 210W-V эксплуатационной массой от 5,55 до 21,2 тонны. Электронная система управления колесом Daewoo содержит два режима работы: «режим копания» для работ, требующих значительных усилий на стрелах и экскаваторном оборудовании, и режим «траншей», при котором механизм поворота платформы активно задействован и требует значительной мощности.Станки комплектуются различными видами рабочего оборудования. Среди них стрелы-моноблоки с несколькими вариантами рукояти и различными типами ковшей.Кроме того, в стандартную комплектацию входят кондиционер со сменным фильтром и радио.
Колесные экскаваторы Daewoo 55W-V, 140W-V, 160W-V, 180W-V, 210W-V
| Характеристика/модель | 55W-В. | 140 Вт-В. | 160 Вт-В. | 180 Вт-В. | 210W-В. |
|---|---|---|---|---|---|
| Эксплуатационная масса, т | 5,55 | 12,9-13,7 | 14,4-15,9 | 17,7-18,5 | 19,8-20,4 |
| Максимальная скорость движения, км/ч | 25 | 37 | 37 | 32 | 35 |
Мощность двигателя, л. с. с. | 54 | 128 | 128 | 152 | 157 |
| Вместимость ковша, куб.м. | 0,15 | 0,30-0,76 | 0,28-0,75 | 0,34-0,91 | 0,5-1,18 |
Завершает четверку лидеров сегмента колесных экскаваторов компания Hitachi, которая представляет российскому потребителю четыре модели серии ZX 130W, 160W, 180-W и 210W. Машины имеют эксплуатационную массу от 13,6 до 20,6 тонн. У современного поколения колесных экскаваторов Hitachi усиленная поворотная платформа и кабина с усиленным каркасом.В машинах используются двигатели ISUZU, развивающие мощность от 87,5 до 110 кВт. Колесные экскаваторы Hitachi
оснащены моноблочной стрелой, двумя тремя вариантами рукояти и несколькими типами ковшей. Дополнительное оборудование представлено могильными ковшами, гидромолотами, разрушающими механизмами.
Дополнительное оборудование представлено могильными ковшами, гидромолотами, разрушающими механизмами.
Колесные экскаваторы Hitachi ZX 130W, 160W, 180-W и 210W
Колесные экскаваторы Komatsu (Япония) представлены на российском рынке двумя моделями PW160 и PW180 седьмой серии, серийная масса 16 шт.4 и 18,17 тонн, произведенных на заводе компании в Ганновере (Германия). Станки поставляются в двух комплектах — с одномерной и двухрожковой стрелой. В стандартной комплектации PW160 и PW180 оснащены двумя аутригерами размерами 2,55х0,56 метра и одним прямым бульдозерным отвалом шириной 2,5 метра. При этом стабилизирующее оборудование и отвал взаимозаменяемы, их установка спереди или сзади машины осуществляется исходя из требований пользователей.
Колесные экскаваторы Caterpillar M313D, M315D и M316D
| Характеристика/модель | М313Д. | М315Д. | М316Д.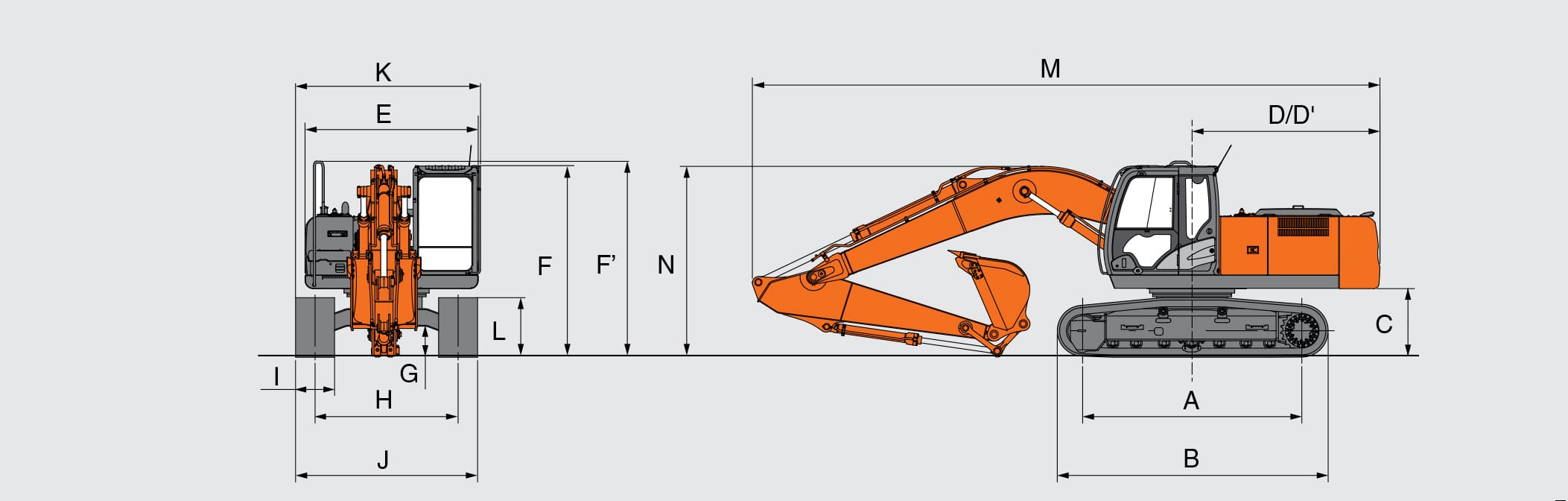 | М318Д. | М322Д. |
|---|---|---|---|---|---|
| Двигатель | C4.4 ACERT | C4.4 ACERT | C6.6 ACERT. | C6.6 ACERT. | C6.6 ACERT. |
| Полная мощность, кВт | 102 | 108 | 124 | 130 | 129 |
| Полезная мощность, кВт | 95 | 101 | 118 | 124 | 123 |
| Эксплуатационная масса, т | 13,6-15,8 | 15,7-17,9 | 16,6-18,8 | 18,2-20,1 | 20,0-22,0 |
Макс. скорость движения, км/ч скорость движения, км/ч | 37 | 34 | 37 | 37 | 25 |
Еще один производитель с мировым именем Volvo (Европа) — представляет потребителям России три модели Колесных экскаваторов EW140C, EW160C, EW180C массой от 14,4 до 20,1 тонн. Экскаваторы оснащены дизельными двигателями, обеспечивающими высокий крутящий момент при низких оборотах двигателя и экономию топлива.
Электронная система управления состоит из нескольких компьютеров, объединенных общим каналом данных.Все необходимые параметры отображаются на дисплее. В машинах предусмотрено четыре режима работы: P. Стояночный, T — транспортный, W — рабочий, C — пользовательский. Экскаваторы Volvo разнообразная техника. Машины могут комплектоваться моноблочной и шарнирной стрелой в сочетании с несколькими типами рукояти.
Колесные экскаваторы Volvo EW140C, EW160C и EW180C
В заключение хотелось бы отметить, что рынок импортных колесных экскаваторов в России только начал формироваться и в ближайшее время претерпит существенные изменения.
 В частности, ожидается рост объемов поставок от японских производителей. . При этом объемы китайских машиностроителей увеличатся. В дальнейшем каждый отдельный участник рынка сможет занять свое место в отрасли, в соответствии с тем, что соотношение цены оборудования и предлагаемых им характеристик является востребованным.
В частности, ожидается рост объемов поставок от японских производителей. . При этом объемы китайских машиностроителей увеличатся. В дальнейшем каждый отдельный участник рынка сможет занять свое место в отрасли, в соответствии с тем, что соотношение цены оборудования и предлагаемых им характеристик является востребованным. Елена Антропова
март 2008
Экскаватор-погрузчик стал едва ли не самой популярной землеройной машиной.Чаще всего встречаются отечественные машины на базе универсальных тракторов. В последние годы тракторостроители (про Минский завод можно сказать уверенно) начали выпуск модификаций с адаптированной кабиной с ровным полом и вращающимся креслом.
Импортные экскаваторы-манипуляторы перестали быть редкостью, сегмент импортных автомобилей растет очень быстро, и на рынке есть особенность, что выбирают либо максимально доступную российскую или белорусскую машину, либо функционально насыщенную, комфортную и эстетичную иномарку с полностью привод, два-три режима рулевого управления, двумерный погрузочный ковш, телескопическая рукоять. Дополнительные удобства оператора, термин «водитель» или «механик» с иномаркой как-то не вяжется. Если мы тратим деньги, то имеем от них максимум. Но и практические соображения не отбрасываются. Органы управления рабочим оборудованием выбирают, как правило, рычажными с механической связью, а гидронасосы — шестеренчатыми: с ними проще, быстрее и дешевле в ремонте.
Дополнительные удобства оператора, термин «водитель» или «механик» с иномаркой как-то не вяжется. Если мы тратим деньги, то имеем от них максимум. Но и практические соображения не отбрасываются. Органы управления рабочим оборудованием выбирают, как правило, рычажными с механической связью, а гидронасосы — шестеренчатыми: с ними проще, быстрее и дешевле в ремонте.
Среди поставщиков импортной техники определились лидеры. Это британская частная компания JCB, долгое время связанная исключительно с экскаваторами-погрузчиками, быстро набирающая обороты New Holland, Caterpillar, которая до сих пор не может вырваться, Komatsu и Volvo, ориентированная на бульдозеры, а вторая на сочлененный самосвал грузовые автомобили.Кроме них в России представлены Terex, Case, Hydromec, Dressta, но их продажи влияния не оказывают.
JCB. С 2004 года кардинально обновляет и расширяет свою самую популярную продуктовую линейку. К основным моделям 1cx, 2cx, 3cx и 4cx в 2004 году добавились Mini CX. В 2005 году было представлено новое поколение двигателей 3cx и 4cx с двигателем собственного производства JCB 444. За месяц до Bauma 2007 на «домашнем» мероприятии перед Bauma был представлен концептуально новый загрузчик MIDI CX.
В 2005 году было представлено новое поколение двигателей 3cx и 4cx с двигателем собственного производства JCB 444. За месяц до Bauma 2007 на «домашнем» мероприятии перед Bauma был представлен концептуально новый загрузчик MIDI CX.
На сегодняшний день модельный ряд насчитывает шесть базовых моделей, количество модификаций исчисляется двумя десятками. Так, покрытие модели 3сх поставляется в шести модификациях, отличающихся мощностью двигателя, рабочим оборудованием (одно- или двухотвесным погрузочным ковшом, с телескопической рукоятью экскаватора или без нее), размером колес на передней оси и рулевым управлением. контроль. С одинаковыми колесами на обеих осях и трехрежимным рулевым управлением поставляются модификации 3CX Super. Модификации семейства 2сх, очень популярные у себя на родине, более разнообразны.Возможны варианты, где вместо экскаваторного оборудования устанавливали компрессор или механизм трехточечного заклинивания и ВОМ.
Главной особенностью экскаваторов-погрузчиков 3сх и 4сх нового поколения, поставки которых в Россию начались в том же 2005 году, является, конечно же, двигатель JCB 444 (4 цилиндра, объем 4,4 литра), получивший Устойчивая марка DIESELMAX. Основу нынешней линейки составляют двигатели с топливной системой Bosch. COMMON RAIL.. До конца 2007 года был запущен выпуск последней модели с механическим впрыском, который также соответствует требованиям Stage 3A/Tier 3.
Основу нынешней линейки составляют двигатели с топливной системой Bosch. COMMON RAIL.. До конца 2007 года был запущен выпуск последней модели с механическим впрыском, который также соответствует требованиям Stage 3A/Tier 3.
DIESELMAX развивают максимальный крутящий момент при 1300 мин-1, а скорость вращения ограничена 2200 мин-1. Большой крутящий момент на низкой скорости был одним из ключевых критериев и причин для размещения компанией JCB значительных инвестиций в разработку и производство. Крутящий момент придает машине мощность, необходимую для выполнения тяжелых операций на малых оборотах, позволяет быстро реагировать на изменение нагрузки, сокращает рабочий цикл и снижает уровень шума. Двигатель массивный и жесткий.Чугунный блок цилиндров с расточенными в нем цилиндрами сопряжен с монолитной чугунной опорой коленчатого вала. Головка блока также монолитна и изготовлена из чугуна. Двигатель агрегатирован с новым гидротрансформатором с красным замком, рассчитанным на больший крутящий момент.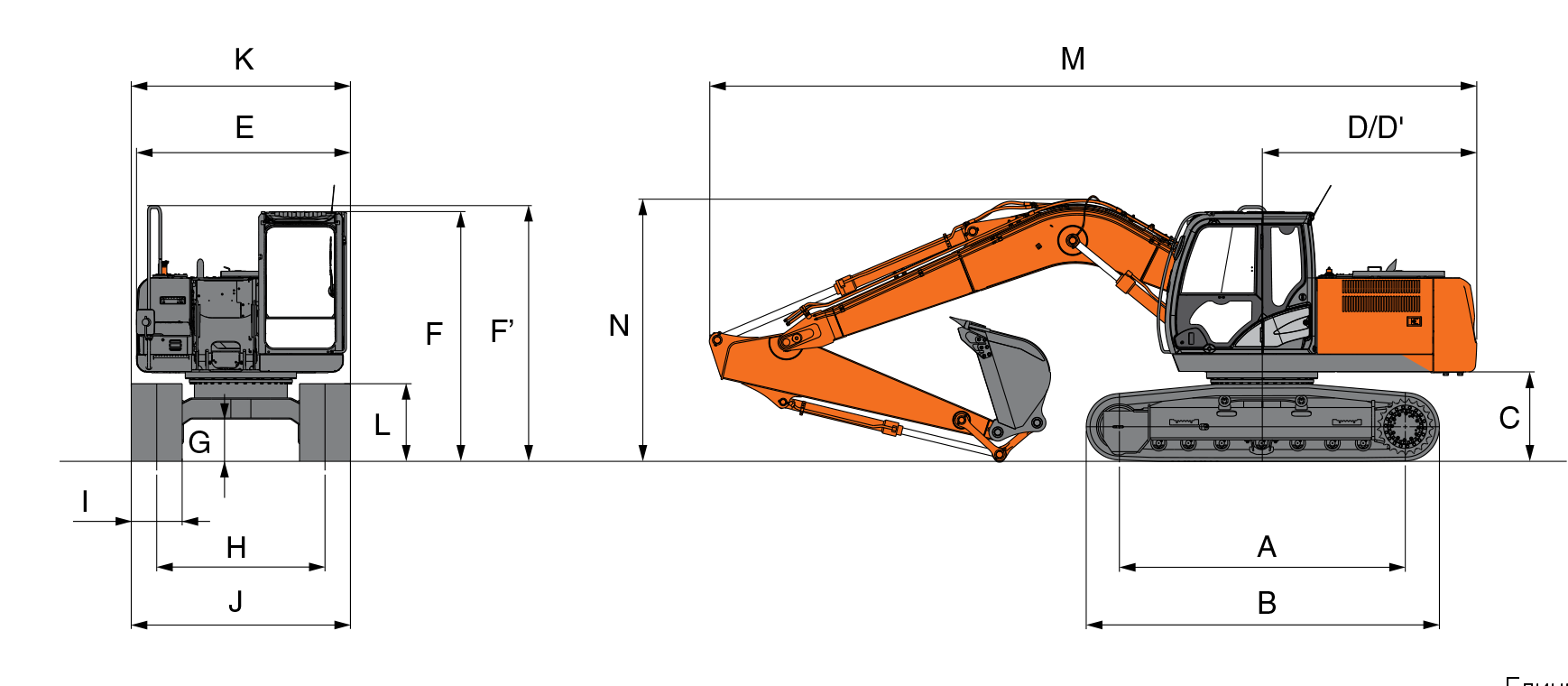 В гидросистеме давление было поднято на 10 %, что не только увеличило грузоподъемность и объемную силу, но и уменьшило габариты и массу гидросистемы.
В гидросистеме давление было поднято на 10 %, что не только увеличило грузоподъемность и объемную силу, но и уменьшило габариты и массу гидросистемы.
Внешний вид тоже изменился, и не только декоративный.Составной капот заменен цельным, поднимающимся к салону. В кабине, внешне такой же, как у модели Row 2002 года, произведены некоторые внутренние доработки. Так, рулевая колонка уже стала совпадать по ширине с капотом. Хорошо видны передние колеса и стрелка. Внутренности салона, как всегда JCB, отличает броский дизайн, выполненный в серо-черных тонах со вставками под алюминий. На выбор два варианта систем управления рабочим оборудованием – рычажные и многофункциональные джойстики.Джойстики вмонтированы в подлокотники и поворачиваются вместе с креслом — можно работать, поворачивая кресло вбок.
Семейство 2сх, включающее шесть основных модификаций, отличается от «старших» моделей габаритными размерами, грузоподъемностью и кабиной образца 1997 г. Машины 2сх компактны и маневренны — все колеса управляемые. Все модификации 2сх снабжены колесами одинакового размера по обеим осям. Самая маленькая модель 1СХ имеет общую черту с погрузчиком с бортовым вращением Робот — бортовое вращение и гидропередачу, но двигатель 1СХ впереди, рабочее место приподнято и достаточно просторно для установки поворотного кресла.Концепция бортового поворота дает существенные преимущества в маневренности — разворот на месте. JCB смонтировала экскаваторное оборудование для роботов-погрузчиков, но 1cx разработан именно как полноценный экскаватор-погрузчик. Модель 1cx поставляется как с открытой кабиной, так и с остеклением.
Все модификации 2сх снабжены колесами одинакового размера по обеим осям. Самая маленькая модель 1СХ имеет общую черту с погрузчиком с бортовым вращением Робот — бортовое вращение и гидропередачу, но двигатель 1СХ впереди, рабочее место приподнято и достаточно просторно для установки поворотного кресла.Концепция бортового поворота дает существенные преимущества в маневренности — разворот на месте. JCB смонтировала экскаваторное оборудование для роботов-погрузчиков, но 1cx разработан именно как полноценный экскаватор-погрузчик. Модель 1cx поставляется как с открытой кабиной, так и с остеклением.
Новинка 2007 года — Экскаватор-погрузчик MIDI CX, по задумке разработчиков, занявший технологическую нишу между 1CX и 2CX. Точно такая же внешне, как 2cx и 3cx, новинка заключает в себе множество оригинальных технических решений.Прежде всего, это быстросъемная экскаваторная сцепка. Стрела, рама с опорами и рычагами управления выполнена в виде единого узла, оператор которого может самостоятельно за несколько минут снять и установить другое оборудование, в том числе и сельскохозяйственное — машина оснащена задним валом силового агрегата. -отключение и гидравлические разъемы, заказ будет установлен по запросу.
-отключение и гидравлические разъемы, заказ будет установлен по запросу.
Основной загрузочный ковш также является съемным. MIDI CX совместим с широким спектром насадок, выпускаемых для 2cx, мини-экскаватора модели 803 и роботов-погрузчиков.Гидростатическая трансмиссия. При полном приводе обеспечивает бесступенчатый набор скорости до 26 км/ч. Она же позволила реализовать плотную компоновку малогабаритной машины. MIDI CX оснащен 4-цилиндровым дизельным двигателем мощностью 38 кВт. Новый экскаватор-погрузчик будет выпущен в двух модификациях — с навесом ROPS/FOPS и остекленной кабиной. Для первого варианта предусмотрен кожух экскаватора с рычажным управлением, для второго – с джойстиком.
Первый экскаватор-погрузчик Mini CX Public увидел на Bauma 2004.На Bauma 2007 представлен Mini CX 4×4 Series II без лишней помпы. MINI движет 3-х цилиндровый дизельный двигатель, гидравлическая трансмиссия, модель 2004 года, привод на задние колеса, Модель 2007 года Полный привод, управляемые колеса спереди. Установлена рукоятка MINI на экскаватор JCB. 8015, поэтому имеет полный набор оборудования для мини-экскаваторов. MINI CX на самом деле игрушка и интереса для российского рынка пока нет.
Установлена рукоятка MINI на экскаватор JCB. 8015, поэтому имеет полный набор оборудования для мини-экскаваторов. MINI CX на самом деле игрушка и интереса для российского рынка пока нет.
Что готовит JCB? Уже два года на «домашних» выставках демонстрируют концептуальную модель экскаватора «телескоп» 4Ч ТМ, и не факт, что в 2008 году концепция воплотится в серийную модель.Машина несет двухсекционную телескопическую стрелу, которая расположена по оси машины над капотом. Чтобы скомпоновать автомобиль таким образом, двигатель заглушили, увеличили колесную базу и применили удлиненный стреловидный борт. Погрузчик-погрузчик — 2,5 тонны, высота подъема — 5,2 м. Сзади от машины — «обычная» экскаваторная техника.
Гонка за продуктовой корзиной, устроенная CNH (Case-New Holland), дает результаты. Усилия не размазаны по четырем частично конкурирующим друг с другом брендам, а сконцентрированы на одном — NEW HOLLAND. Как и в случае с мини-погрузчиками, где New Holland вырвалась на вторую после Bobcat позицию среди импортеров и возглавляет группу догоняющих, в сегменте импортных вилочных погрузчиков она заняла второе место после JCB.
Хотя NEW HOLLAND бренд США, но CNH принадлежит итальянской spruit Fiat Group, экскаваторы-погрузчики производит завод в итальянском городке Имола, разработка тоже итальянская, тем более, что сегодняшняя линейка напрямую от Fiat-kobelco линия.То есть американцы взяли только вывеску для поддержания продаж итальянской техники в Северной Америке.
Текущая линейка New Holland LB90.B, LB95.B, LB110.B и LB115. B это фактически перекрашенный FIAT-Kobelco. Первые три модели выполнены на одной платформе и отличаются мощностью двигателя 71 и 82 кВт, габаритами и характеристиками экскаваторного оборудования. Габариты и возможности «старшей» модели LB115.B впечатляют. У нее одинаковые по размеру колеса по обеим осям руля и доверительный руль.
Экскаватор-погрузчик New Holland можно узнать издалека по характерной форме экскаваторной стрелы и прямому погрузчику. Шестигранная, остекленная по периметру кабина с плоскими тонированными стеклами выглядит современно и стильно, да и в целом вид экскаватора-погрузчика гармоничен и радует глаз. Однако композитный капот явно устарел. Интерьер салона хороший, но от этого функциональность только выигрывает – ничего не отвлекает, взгляд не цепляется за яркие мелочи. Кабина натерта серым твердым пластиком, заводское качество и сборка деталей отделки на высоком уровне.Рычаг управления рабочим оборудованием. Джойстики управления экскаватором с сервоприводом комплектуются по заказу. Джойстики установлены на высоких стойках и не связаны с креслом.
Однако композитный капот явно устарел. Интерьер салона хороший, но от этого функциональность только выигрывает – ничего не отвлекает, взгляд не цепляется за яркие мелочи. Кабина натерта серым твердым пластиком, заводское качество и сборка деталей отделки на высоком уровне.Рычаг управления рабочим оборудованием. Джойстики управления экскаватором с сервоприводом комплектуются по заказу. Джойстики установлены на высоких стойках и не связаны с креслом.
В базовой комплектации три «младшие» модели оснащены синхронизированными механическими коробками передач (КП) PowerShuttle 4×4 (четыре передачи вперед и четыре назад). Функцию сцепления выполняет кнопка на рычаге переключения передач. Для «старшего» LB115. Б — стандартная полуавтоматическая КП PowerShift 4×2 (четыре вперед и два назад) с переключателем подачи.Тот же КП предлагается в качестве опции для «младших» моделей.
На выставке Bauma 2007 компания New Holland представила модернизированные модели B110 и B115, выполненные на тех же платформах.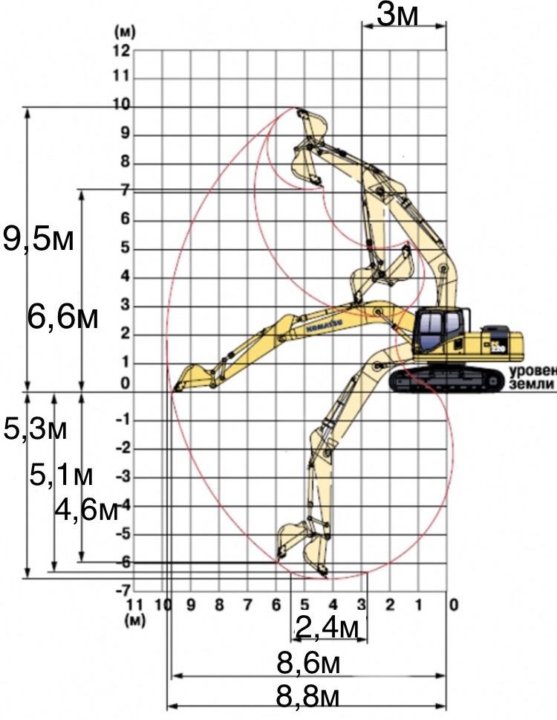 Основными их отличиями являются двигатель CNH 445TA/EGH Stage 3A/Tier 3 мощностью 82 кВт при 2200 мин-1 с аккумуляторной системой впрыска, турбонаддувом и промежуточным охлаждением наддувочного воздуха. Несколько переработана форма переднего противовеса с целью улучшения доступа воздуха в моторный отсек. Композитная конструкция капота сохранена.Знак NEW HOLLAND на лобовом стекле разработан, скорее всего, для улучшения обзора. Освежился дизайн приборных панелей, он стал более броским. Поскольку двигателем Common Rail управляет электроника, логично заменить рычаг регулировки скорости на вращающийся регулятор.
Основными их отличиями являются двигатель CNH 445TA/EGH Stage 3A/Tier 3 мощностью 82 кВт при 2200 мин-1 с аккумуляторной системой впрыска, турбонаддувом и промежуточным охлаждением наддувочного воздуха. Несколько переработана форма переднего противовеса с целью улучшения доступа воздуха в моторный отсек. Композитная конструкция капота сохранена.Знак NEW HOLLAND на лобовом стекле разработан, скорее всего, для улучшения обзора. Освежился дизайн приборных панелей, он стал более броским. Поскольку двигателем Common Rail управляет электроника, логично заменить рычаг регулировки скорости на вращающийся регулятор.
Экскаватор-погрузчик Гусеница. Легко узнать сзади по характерной изогнутой стреле экскаватора. До 2006 года линейку экскаваторов Caterpillar нельзя было назвать полной — не было мощных моделей с колесами одинакового размера по обеим осям.Серия D выполнялась на одной платформе, а модели отличались друг от друга комплектацией. Отзывы о ней были очень хорошие. В частности, говорили, что в морозную зиму Зима погрузчик КПП, в отличие от конкурентов, завелся.
В январе 2006 года компания Caterpillar вывела на рынок новую серию E. В модельном ряду было шесть базовых моделей против четырех, добавились «старшие» модели 434E и 444e, получившие задний мост с управляемыми колесами и колесами одинакового размера на обеих осях. .«Младшие» модели 422е, 428е, 432е и 442е поставляются с колесами разного размера, В стандартной комплектации управляемые колеса спереди. В наследство от Серии D двигатель Caterpillar 3054c с турбонаддувом (для 422E — атмосферный, турбочардовый вариант). По сравнению с серией D изменена гидравлическая направляющая и геометрия рычажных механизмов погрузчика, за счет чего увеличено разрывное усилие на 10 %. Кардинально изменена конструкция телескопической рукояти экскаватора, входящего в расширенную комплектацию.Если у машин серии D выдвижная секция находилась внутри корпуса рукоятки, то у серии Е наоборот — корпус выдвигается наружу.
Модели 422е и 428Е в базовой комплектации оснащены механическим КП PowerShuttle 4×4 и рычажным управлением экскаватором, модели 432е и 442е — КП PowerShuttle и джойстиками, по заказу полуавтоматом КП AUTO-SHIFT 5×3. Джойстики и КП AUTO-SHIFT входят в базовую комплектацию «Старших» моделей 434e и 444e.Джойстики устанавливаются на колонки отдельно от кресла — решение становится стандартным.
Джойстики и КП AUTO-SHIFT входят в базовую комплектацию «Старших» моделей 434e и 444e.Джойстики устанавливаются на колонки отдельно от кресла — решение становится стандартным.
Если вы помните, что Точки Д Точки Д Точки Д ориентированы с левой стороны и доступны через набедренную откидную половинку, а для более детального доступа в подкапотное пространство их надо вооружиться гаечным ключом, то эта ситуация была несколько где-то. Крышка капота полностью поднимается из кабины. Дизайн кабины обновлен как снаружи, так и изнутри.Изменилась геометрия кабины, плоские стекла заменили гнутыми, заднее стекло стало целым. Несколько изменен дизайн рулевой колонки и панели инструментов с правой стороны.
Линейка экскаваторов-погрузчиков Komatsu. Включает пять моделей — три модели с передними управляемыми колесами WB91R-5, WB93R-5, WB97R-5 и две (WB93S-5 и WB97S-5) со всеми управляемыми колесами. Российский офис пытается акцентировать внимание покупателей на трех наиболее функционально насыщенных моделях — WB93R-5, WB93S-5 и WB97S-5.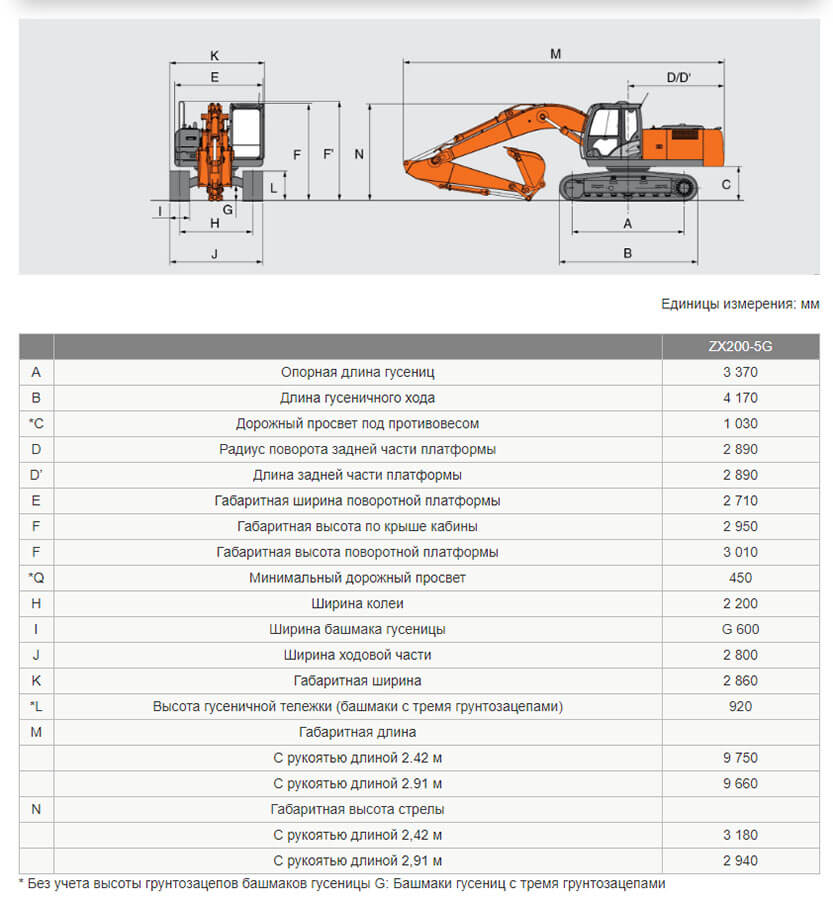 Они относятся к пятому поколению, выпуск которого начался в 2006 году на заводе Komatsu Utility Europe в городке Эсте (Италия).
Они относятся к пятому поколению, выпуск которого начался в 2006 году на заводе Komatsu Utility Europe в городке Эсте (Италия).
Характерной чертой этого поколения является двигатель Komatsu, на котором можно найти шильдик Iveco. Двигатели не везут из другого полушария, их собирают здесь, в Италии. Еще одна интересная функция, полезная для холодного климата — предварительный подогрев от внешнего источника 220 В.
Внешний вид пятого поколения сильно изменился, приобрел современные обтекаемые формы, кабина была оснащена большими гнутыми стеклами, не мешающими обзору.Изменена форма стрелы экскаватора: она стала изогнутой, а скоба крепления гидроцилиндров перенесена на середину.
Три интересующие модели по характеристикам довольно близки. «Младшая» модель WB93R-5 Комплектация колесами разного размера на передней и задней осях, 4-ступенчатая механическая КП PowerShuttle. WB93S-5 имеет все четыре колеса 24-дюймовые колеса, установлен PowerShuttle КП, на WB97S-5 — 28-дюймовые колеса и полуавтомат КП PowerShift. Передний привод включается как вручную, так и автоматически.При наборе скорости привод автоматически выключается, при торможении снова включается. На WB93S-5 и WB97S-5 тринк рулевого управления всеми колесами, на «младшей» модели WB93R-5 — только передним. Для переключения режимов рулевого управления нужно одновременно нажать две кнопки на панели управления — это защита от случайного переключения.
Передний привод включается как вручную, так и автоматически.При наборе скорости привод автоматически выключается, при торможении снова включается. На WB93S-5 и WB97S-5 тринк рулевого управления всеми колесами, на «младшей» модели WB93R-5 — только передним. Для переключения режимов рулевого управления нужно одновременно нажать две кнопки на панели управления — это защита от случайного переключения.
Комплектация кабин отличается в основном органами управления экскаватора. WB93R-5 и WB93S-5 оснащены рычажными механизмами, WB97S-5 — джойстиками.Джойстики устанавливаются на колонки отдельно от кресла. Рычаг управления погрузчиком заменен многофункциональным, эстетически более выигрышным джойстиком. Конструкция приборных панелей и расположение некоторых приборов и переключателей так, чтобы доступ к ним стал проще.
Замыкает пятерку лидеров Volvo se. Компания давно занимается строительством тракторных экскаваторов на базе тракторов и фронтальных погрузчиков с шарнирно-сочлененной рамой, а с 1965 года от ворот завода в Эскильстуне вышло в свет не одно поколение таких машин. К третьему тысячелетию Volvo начала готовить экскаваторы-погрузчики нового поколения, идя по пути, проложенному JCB и Fermec. То есть у экскаватора-погрузчика должна быть своя, предназначенная только ему, базовая машина, а не положенный трактор или переделанный фронтальный погрузчик. Разработка, начатая фактически с нуля, заняла около четырех лет, и весной 2002 года компания представила первые модели современной линейки LB70 и LB71. Производство развернуто на заводе Volvo во Вроцлаве, Польша.В 2004 году линейка была расширена моделями LB60 и LB61, а в 2007 году появились модификации LB71 Plus и LB61 Plus. Модели LB60 и LB70 отличаются от остальной экскаваторной техники разблокированной осью копания и складывающимися опорами.
К третьему тысячелетию Volvo начала готовить экскаваторы-погрузчики нового поколения, идя по пути, проложенному JCB и Fermec. То есть у экскаватора-погрузчика должна быть своя, предназначенная только ему, базовая машина, а не положенный трактор или переделанный фронтальный погрузчик. Разработка, начатая фактически с нуля, заняла около четырех лет, и весной 2002 года компания представила первые модели современной линейки LB70 и LB71. Производство развернуто на заводе Volvo во Вроцлаве, Польша.В 2004 году линейка была расширена моделями LB60 и LB61, а в 2007 году появились модификации LB71 Plus и LB61 Plus. Модели LB60 и LB70 отличаются от остальной экскаваторной техники разблокированной осью копания и складывающимися опорами.
Суммарный 4-цилиндровый 4-литровый дизель Volvo D4D агрегатируется с синхронизированной механической КП PowerShuttle 4×4. Мощность двигателя варьируется от модели к модели в сторону увеличения. Для LB61 Plus, LB71 и LB71 Plus предлагаются расширенные конфигурации с полуавтоматическим CP PowerShift 4×4, джойстиками управления экскаватором и двумерным погрузочным ковшом. Для машин, оборудованных механизмами быстрого перемещения экскаватора и погрузочной техники, имеется сцепка, аналогичная размерам экскаваторов и погрузчиков.
Для машин, оборудованных механизмами быстрого перемещения экскаватора и погрузочной техники, имеется сцепка, аналогичная размерам экскаваторов и погрузчиков.
Внешний вид экскаватора-погрузчика выполнен в духе современных тенденций, кабина просторная и удобная, но интерьер сегодня выглядит старомодно, особенно широкая передняя панель.
Для пользователей техники Volvo: Масла под маркой Volvo производит ExxonMobil. Собственные масла мобил Имеют допуск вольво.
Характеристики экскаваторов, соответствующие разным ковшам экскаваторов — новости отрасли — Новости
По типу ковша экскаваторы можно разделить на одноковшовые, экскаваторы с обратной лопатой, экскаваторы-драглайны и экскаваторы с грейферным ковшом. Экскаваторы с прямой лопатой в основном используются для выемки материалов над поверхностью, а экскаваторы с обратной лопатой в основном используются для выемки материалов под поверхностью.
1. Экскаватор с обратной лопатой
Экскаватор с обратной лопатой — это наиболее распространенный из тех, что мы видели, когда он движется назад и вниз, с силой разрезая почву. Его можно использовать для земляных работ ниже рабочей поверхности упора. Основные методы работы включают в себя: выемку торца траншеи, выемку сбоку траншеи, выемку грунта по прямой линии, выемку траншеи по кривой, выемку под определенным углом, выемку сверхглубокой траншеи и выемку траншеи на откосе.
Его можно использовать для земляных работ ниже рабочей поверхности упора. Основные методы работы включают в себя: выемку торца траншеи, выемку сбоку траншеи, выемку грунта по прямой линии, выемку траншеи по кривой, выемку под определенным углом, выемку сверхглубокой траншеи и выемку траншеи на откосе.
2. Одноковшовый экскаватор
Лопатный экскаватор. Его характеристика — «форсированное резание почвы вперед и вверх». Передняя лопата обладает большим усилием копания и может выкапывать почву выше упорной поверхности.Он подходит для рытья сухих котлованов высотой более 2 м, но при этом должны быть установлены пандусы вверх и вниз. Ковш передней лопаты больше, чем ковш обратной лопаты того же аналога. Он может копать первый-третий типы грунта с содержанием воды не более 27%, и он может сотрудничать с самосвалом для завершения всей операции по земляным работам и транспортировке, а также может копать большие сухие котлованы и насыпи, и т. д. Способ земляных работ экскаватором с прямой лопатой основан на взаимном расположении маршрута земляных работ и транспортного средства. Существует два способа копания и разгрузки: копание вперед, разгрузка сбоку; прямое копание, обратное Чтобы разгрузить почву.
Существует два способа копания и разгрузки: копание вперед, разгрузка сбоку; прямое копание, обратное Чтобы разгрузить почву.
3. Экскаватор-драглайн
Экскаватор-драглайн также называется канатным экскаватором. Характеристики его копания: «назад вниз, срезать грунт под собственным весом». Он подходит для выемки грунта класса I и класса II ниже упорной поверхности. Во время работы используйте силу инерции, чтобы выбросить ковш и копать дальше. Радиус копания и глубина копания больше, но он не такой гибкий и точный, как экскаватор.Он особенно подходит для рытья больших и глубоких котлованов или подводных земляных работ.
4. Экскаватор с грейферным ковшом
Экскаваторы с грейферным ковшом также называются грейферными экскаваторами. Характеристики его копания таковы: «прямо вверх-вниз, срезать грунт под собственным весом». Он подходит для выемки грунта классов I и II ниже поверхности упора и часто используется для выемки котлованов и кессонов на участках с мягким грунтом. Он особенно подходит для рытья глубоких и узких котлованов, углубления старых каналов и рытья ила в воде или для погрузки сыпучих материалов, таких как щебень и шлак.Методы земляных работ включают в себя выемку траншеи сбоку и выемку грунта. Если грейферный ковш выполнен в форме стержня, его также можно использовать для погрузки блоков руды, щепы, древесины и т. д. на складе древесины.
Он особенно подходит для рытья глубоких и узких котлованов, углубления старых каналов и рытья ила в воде или для погрузки сыпучих материалов, таких как щебень и шлак.Методы земляных работ включают в себя выемку траншеи сбоку и выемку грунта. Если грейферный ковш выполнен в форме стержня, его также можно использовать для погрузки блоков руды, щепы, древесины и т. д. на складе древесины.
Правильный выбор экскаватора — Руководство по покупке DirectIndustry
Средний экскаватор HYDREMA с рельсовой конфигурацией для применения на железной дорогеСуществует два основных семейства экскаваторов: колесные и гусеничные, обе эти конфигурации имеют свои преимущества. и недостатки, и вам сначала придется определить, какой из них лучше всего подходит для ваших нужд.
Затем вам нужно определить, нужен ли вам «стандартный» экскаватор или конкретная конфигурация. Между различными экскаваторами не так много конструктивных различий, даже от одного производителя к другому, экскаватор — универсальная машина, и часто достаточно заменить его инструмент для работы, которую необходимо выполнить. Однако есть некоторые конфигурации, адаптированные к конкретным условиям, например:
Однако есть некоторые конфигурации, адаптированные к конкретным условиям, например:
- Экскаваторы для сноса имеют стрелы, которые были выдвинуты, чтобы достать инструменты для сноса до верха зданий, а их кабина, как правило, защищена от падающих материалов и может быть наклонена вверх, чтобы оператор мог видеть, где он или она работает.
- Экскаваторы с нулевым выносом хвостовой части можно поворачивать, не выступая над землей машины, что позволяет им работать вблизи стен без риска их касания. Шагающие экскаваторы оснащены шарнирными «лапками», позволяющими им работать на крутых склонах или пересеченной местности.
- Многофункциональные экскаваторы имеют стрелу с дополнительными шарнирами для увеличения диапазона возможных движений и, следовательно, универсальности машины.
- Существуют также рельсово-дорожные версии , предназначенные для передвижения по железнодорожным сетям, амфибийные модели для работы на водоемах и т. д.
 д.
д. Основными критериями выбора экскаватора являются его размер и мощность . Размер машины характеризуется ее эксплуатационной массой (например, речь идет о 10-тонном экскаваторе). Доступен широкий диапазон размеров: от менее одной тонны для самых маленьких моделей до более 100 тонн для экскаваторов, используемых в открытых горных работах.
Вы должны выбрать экскаватор, адаптированный к вашим потребностям, слишком маленькая модель может не соответствовать потребностям выполняемой работы, слишком большая модель может быть слишком громоздкой и излишне дорогой.Вес экскаватора дает общее представление о размерах машины, но важно убедиться, что стрела может достигать максимального расстояния, на котором ей придется работать. В своей технической документации большинство производителей предоставляют диаграмму, показывающую кинематику стрелы и, следовательно, максимальные высоты и глубины, которые она может достичь.
Другим важным фактором является мощность двигателя , который питает гидравлический блок, приводящий в действие стрелу и любые инструменты, установленные на ней.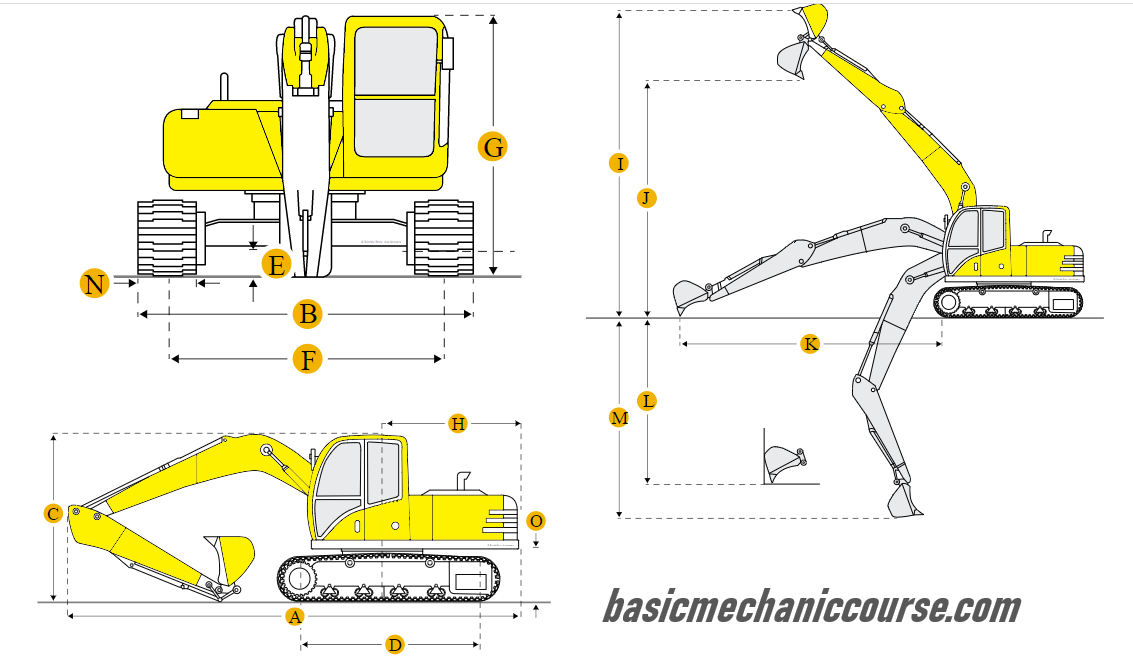 Он более или менее коррелирует с размерами машины, но может варьироваться, более мощный двигатель сможет выполнять более сложные работы.
Он более или менее коррелирует с размерами машины, но может варьироваться, более мощный двигатель сможет выполнять более сложные работы.
Большинство экскаваторов оснащены дизельными двигателями, хотя в последние годы мы стали свидетелями появления некоторых гибридных дизельных/электрических двигателей, оснащенных системами рекуперации энергии. Таким образом, на это оборудование распространяются стандарты защиты от загрязнения, действующие в странах, где оно будет использоваться, наиболее известными из которых являются система классификации Tier в США и европейские стандарты выбросов.
После определения основных характеристик необходимой вам машины выбор экскаватора может быть сделан на основе таких критериев, как эргономика водительского места, удобство или вспомогательное оборудование для работы или уровень шума.
Динамические характеристики ковша экскаватора с обратной лопатой на основе Pro/E и ANSYS
[1]
CHEN Jin, WU Jun, Анализ конечных элементов и стресс-тестирование манипулятора в крупногабаритных гидравлических экскаваторах с торцевой лопатой, J.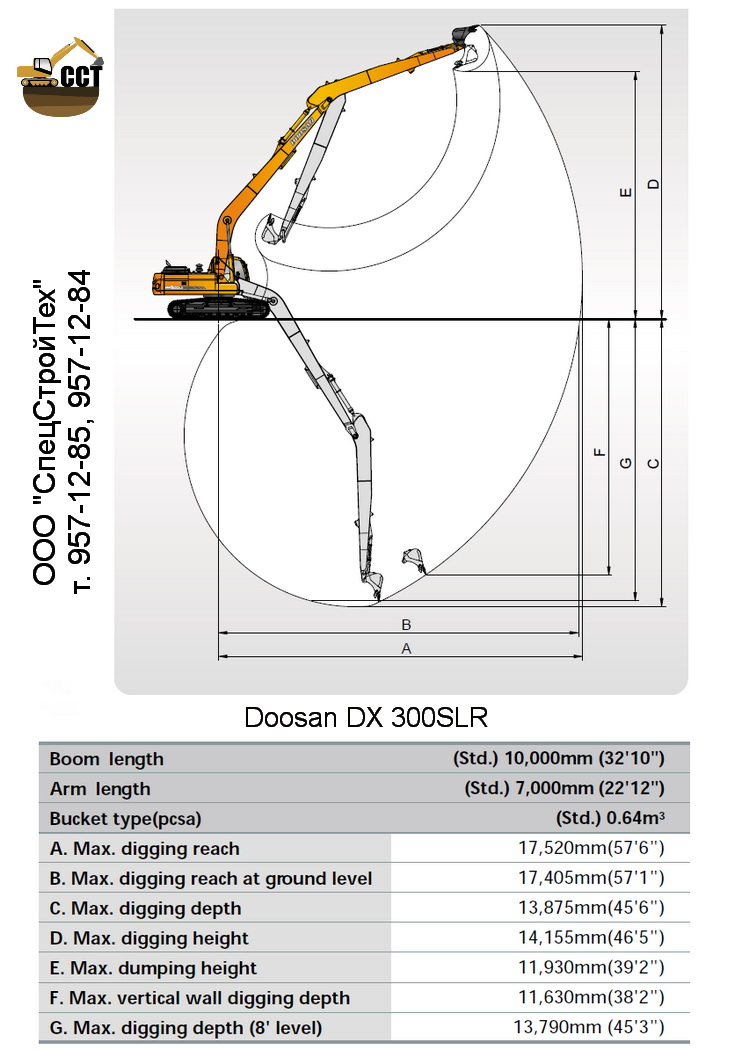 Китайский журнал строительной техники, 2007, 02.
Китайский журнал строительной техники, 2007, 02.
[2] ZHU Jian-xin, HU Huo-yan, MEI Yong-bing, Исследование энергопотребления при ковшовой вибрационной выемке грунта гидравлическим экскаватором, J.Журнал Университета Тунцзи (естественные науки), 2008, 10.
[3]
Дж. Уокер, Х.С. Ю. Адаптивный конечно-элементный анализ проникновения конуса в глину, Дж.Acta·Geotechnica, 2006(4): 43-57.
Ю. Адаптивный конечно-элементный анализ проникновения конуса в глину, Дж.Acta·Geotechnica, 2006(4): 43-57.
[4] М.А. Ай-ли Ляо Цин-си. Численное моделирование резания грунта спиральной фрезой на основе ANSYS/LS_DYNA,J.Журнал Хуачжунского сельскохозяйственного университета, 2009, 02.
[5]
Линь Цинган. Полностью владею Pro/ENGINEER Wildfire 4.0, китайской версией IntegratdCourse, M.Пекин; Издательство электронной промышленности, (2009).
Полностью владею Pro/ENGINEER Wildfire 4.0, китайской версией IntegratdCourse, M.Пекин; Издательство электронной промышленности, (2009).
[6] Хуан Дуншэн, Современное горнодобывающее оборудование, М. Пекин; Коммуникации Пресс, 2003.12.
[7]
LI Xiao-huo, WANG Dan, Анализ методом конечных элементов (FEA) режущего механизма проходческого комбайна для твердых пород на основе Pro/E и ANSYS,J.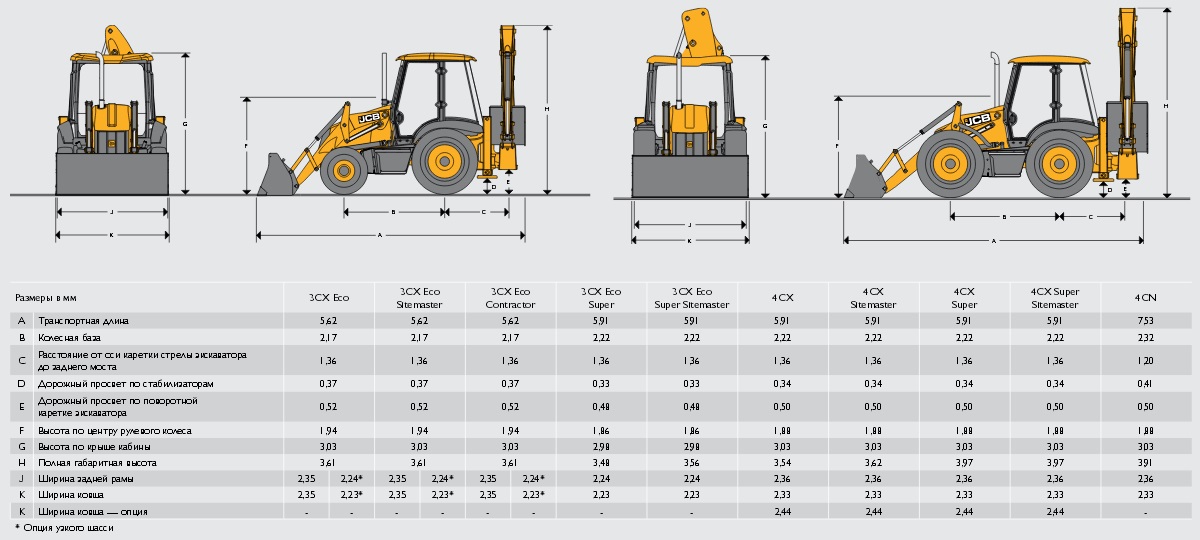 Журнал China Mining 2010, 05.
Журнал China Mining 2010, 05.
[8] Цзэн Пань, Лэй Липин, Фанг Ган. Основано на Руководстве по анализу методом конечных элементов ANSYS: Моделирование и анализ конструкции, М.Пекин; Пресса механической промышленности, (2011).
[9]
Чжэн Инжэнь, Конг Лян Геотехническая пластическая механика грунтов, М. Пекин; China Building Industry Press, 2010, 05.
Пекин; China Building Industry Press, 2010, 05.
[10] Луо Тин, Почвенные конститутивные отношения, М. Пекин; Коммуникации Пресс, 2010, 05.
(PDF) Разработка симулятора экскаватора и характеристики оператора
дает оператору ощущение движения.
Рис.1 Структура тренажера
Фото 1 Вид тренажера с высоты птичьего полета
3.2 Программное обеспечение
Компьютерные графические изображения выполнены из 3D моделей
строительной площадки. На участке есть экскаватор, грузовик и
человека. В симуляторе есть две модели экскаваторов
, средняя и маленькая.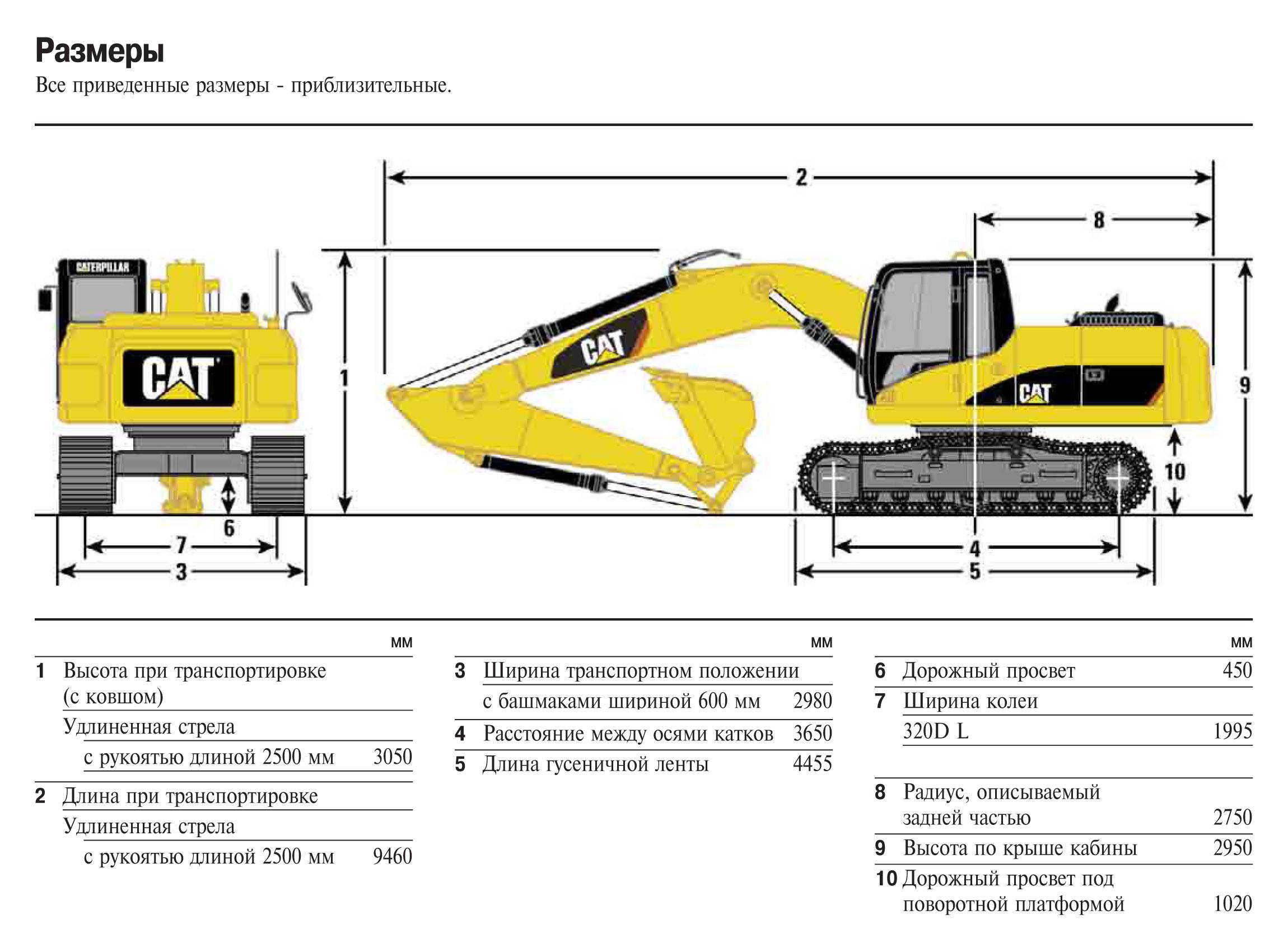 Виды
Виды
с места оператора отличаются друг от друга.Он
имеет несколько моделей людей, таких как рабочие
и пешеходы. Они перемещаются возле экскаватора. Он
имеет одну модель рабочей площадки, включая модель земли, которая
меняет форму в соответствии с земляными работами.
4. Эксперименты
С помощью тренажера были проведены эксперименты с испытуемыми, которые
ежедневно работают на экскаваторе.
В первом эксперименте движения глаз оператора
были измерены с помощью видеокамеры
во время земляных работ, при которых
загружали яму на грузовик.
Во втором эксперименте к земляным работам была добавлена задача обнаружения цели
. Красный или желтый кружок появляется в случайном месте
и в произвольном времени, и оператор
должен отреагировать на цель как можно скорее, т.е. нажать красную
или желтую кнопку. Для контрольного эксперимента по обнаружению цели
задание без земляных работ было выполнено
.
В третьем эксперименте движения глаз оператора
были измерены с помощью видеокамеры
земляных работ, которые проводились не в виртуальных условиях, а
в реальных условиях.Эти эксперименты были проведены с
по, чтобы подтвердить эффективность моделирования виртуальной реальности.
В первом и втором экспериментах использовались два рычага, привычные и непривычные
, потому что
рычаги были разными в зависимости от производителя
экскаватора. Теперь схема рычага определяется JIS,
, но многие старые экскаваторы с формой рычага, отличной от JIS, остаются.
5. Результаты экспериментов
В результате первого эксперимента было установлено, что операторы
большую часть времени смотрели на ковш (см.
рис.2). Считалось, что причина в том, что операторы
внимательно следят за важными объектами для правильного выполнения работы и
, а ковш является наиболее важным для выполнения
работы.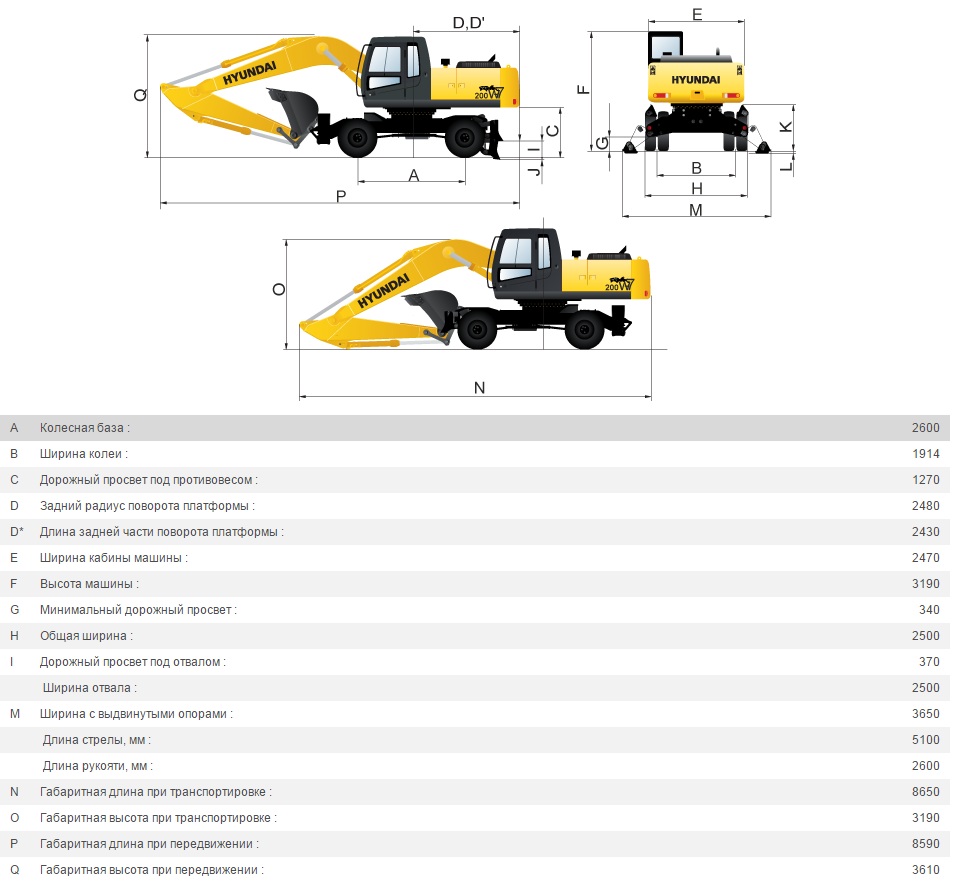 Временная диаграмма движений глаз (см. рис.3)
Временная диаграмма движений глаз (см. рис.3)
подтверждает это предположение. На каждом этапе операции менялись
точки фиксации. На этапе раскопок оператор
смотрел на ковш. В фазе левого поворота оператор смотрел
на ковш и кузов грузовика.В фазе загрузки оператор
смотрел на ковш, загруженный грунт и платформу
грузовика. В фазе правого поворота оператор смотрел на ковш
и землю.
Анализ и экспериментальное исследование вибрационных характеристик поворотной платформы гидравлического экскаватора в сложных условиях работы
Поворотная платформа является несущим основанием гидравлического экскаватора. Динамические характеристики поворотной платформы напрямую влияют на надежность и безопасность всей машины гидравлического экскаватора.В данной работе анализируются характеристики основных внешних воздействий, действующих на гидравлический экскаватор, таких как возбуждение двигателя, возбуждение пульсаций давления поршневого насоса, инерционное возбуждение рабочего органа, дорожное возбуждение. Установлены пути передачи вибрации под действием внешних воздействий. Предложен метод вибрационных испытаний поворотной платформы гидравлического экскаватора. Исследованы вибрационные характеристики поворотной платформы в сложных условиях работы и экспериментально проанализированы внутренние взаимосвязи между вибрационными характеристиками поворотной платформы и возбуждением от двигателя, пульсаций давления поршневого насоса и дорожного возбуждения.Результаты показывают, что поворотная платформа подвергается различным воздействиям, когда она находится в разных условиях работы. Кроме того, внутренние взаимосвязи между динамическими характеристиками поворотной платформы и характеристиками внешнего возбуждения могут быть обнаружены путем анализа сигналов вибрации поворотной платформы, а динамические характеристики всей машины гидравлического экскаватора могут быть глубоко изучены на основе вибрационные характеристики поворотной платформы.
Установлены пути передачи вибрации под действием внешних воздействий. Предложен метод вибрационных испытаний поворотной платформы гидравлического экскаватора. Исследованы вибрационные характеристики поворотной платформы в сложных условиях работы и экспериментально проанализированы внутренние взаимосвязи между вибрационными характеристиками поворотной платформы и возбуждением от двигателя, пульсаций давления поршневого насоса и дорожного возбуждения.Результаты показывают, что поворотная платформа подвергается различным воздействиям, когда она находится в разных условиях работы. Кроме того, внутренние взаимосвязи между динамическими характеристиками поворотной платформы и характеристиками внешнего возбуждения могут быть обнаружены путем анализа сигналов вибрации поворотной платформы, а динамические характеристики всей машины гидравлического экскаватора могут быть глубоко изучены на основе вибрационные характеристики поворотной платформы.
1. Введение
Гидравлические экскаваторы широко используются во многих областях и играют очень важную роль в сокращении ручного труда и повышении эффективности производства труда [1].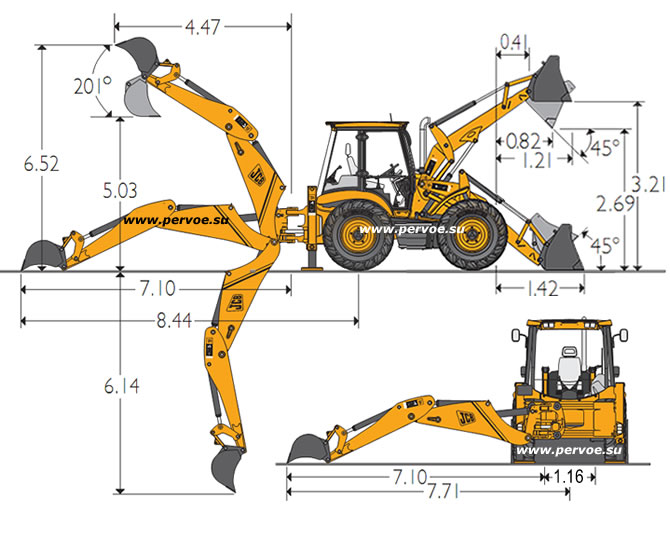 Они используются не только в горнодобывающей промышленности [2], но и при земляных работах, таких как преобразование сельскохозяйственных угодий и снос [3]. Гидравлический экскаватор в основном состоит из поворотной платформы, кабины, рабочего органа, двигателя, гидравлической системы и шагающего устройства. Основные узлы установлены на поворотной платформе гидравлического экскаватора, а это означает, что поворотная платформа является не только несущим основанием гидравлического экскаватора, но и незаменимым промежуточным звеном в пути передачи вибрации.Очевидно, что существует взаимосвязь между вращающейся платформой и основными устройствами гидравлического экскаватора, такими как силовое устройство, рабочее устройство и шагающее устройство. Таким образом, динамические характеристики поворотной платформы могут эффективно отражать внутренние отношения между поворотной платформой и другими устройствами внутри гидравлического экскаватора. Поэтому для обеспечения безопасной и надежной работы гидравлического экскаватора необходимо провести анализ вибрационных характеристик поворотной платформы.
Они используются не только в горнодобывающей промышленности [2], но и при земляных работах, таких как преобразование сельскохозяйственных угодий и снос [3]. Гидравлический экскаватор в основном состоит из поворотной платформы, кабины, рабочего органа, двигателя, гидравлической системы и шагающего устройства. Основные узлы установлены на поворотной платформе гидравлического экскаватора, а это означает, что поворотная платформа является не только несущим основанием гидравлического экскаватора, но и незаменимым промежуточным звеном в пути передачи вибрации.Очевидно, что существует взаимосвязь между вращающейся платформой и основными устройствами гидравлического экскаватора, такими как силовое устройство, рабочее устройство и шагающее устройство. Таким образом, динамические характеристики поворотной платформы могут эффективно отражать внутренние отношения между поворотной платформой и другими устройствами внутри гидравлического экскаватора. Поэтому для обеспечения безопасной и надежной работы гидравлического экскаватора необходимо провести анализ вибрационных характеристик поворотной платформы.
В настоящее время исследования динамики поворотной платформы гидравлических экскаваторов в основном сосредоточены на теоретических исследованиях и исследованиях моделирования. Например, Ли и др. [4] рассчитали собственные частоты и формы колебаний поворотной платформы гидравлического экскаватора и предложили способ избежать резонанса поворотной платформы путем модификации ее конструкции. Результат показал, что среднеквадратичное значение виброускорения кабины усовершенствованного прототипа равно 0.12 м/с 2 , что ниже значения 0,25 м/с 2 до улучшения. Чжан и др. [5] с помощью метода конечных элементов нашли слабые места конструкции поворотной платформы гидравлического экскаватора, что позволило повысить ее устойчивость и общую производительность. Результат показал, что максимальное композиционное напряжение в зоне усталостного разрушения во всех режимах работы уменьшилось со 172,46 МПа до 123,82 МПа. Ян и др. В работе [6] была построена модель связанных боковых крутильных колебаний поворотного механизма гидравлического экскаватора, рассматривая поворотную платформу как эквивалентную вращательную инерционную единицу. Йованович и др. [7] разработали программное обеспечение для определения и детального анализа нагрузки на опорно-поворотный механизм во всем рабочем диапазоне экскаватора. Цинь и др. [8] предложили гидравлически-электрическую гибридную систему поворотного привода экскаватора. Они подтвердили, что энергопотребление предложенной системы было снижено на 37,26% ~ 53,29% в рабочем цикле качания по сравнению с исходной системой, а явление обратного качания в системе качания подавлено. Однако теоретических исследований вибрационной реакции поворотной платформы гидравлического экскаватора в сложных условиях работы проведено немного.
Йованович и др. [7] разработали программное обеспечение для определения и детального анализа нагрузки на опорно-поворотный механизм во всем рабочем диапазоне экскаватора. Цинь и др. [8] предложили гидравлически-электрическую гибридную систему поворотного привода экскаватора. Они подтвердили, что энергопотребление предложенной системы было снижено на 37,26% ~ 53,29% в рабочем цикле качания по сравнению с исходной системой, а явление обратного качания в системе качания подавлено. Однако теоретических исследований вибрационной реакции поворотной платформы гидравлического экскаватора в сложных условиях работы проведено немного.
Экспериментальные исследования являются важным методом изучения динамических характеристик механических конструкций. Поэтому все большее внимание уделяется экспериментальным исследованиям. Например, Вэй и др. В работе [9] были проведены эксперименты по исследованию вибрационных характеристик вращающейся балки в зависимости от напряженности электрического поля, скорости вращения и ускорения. Они обнаружили, что вибрацию балки, вызванную вращательным движением при разных скоростях вращения и ускорениях, можно быстро подавить, приложив электрическое поле к балке ЭР, и оценили возможности жидкости ЭР для ослабления вибрации вращающихся балок.Чжэн и др. [10] посвящены моделированию и анализу испытаний на случайную вибрацию с шестью степенями свободы с использованием усовершенствованной системы с несколькими входами и выходами, в которой можно одновременно контролировать три поступательных и три вращательных движения. Цзян и др. [11] представили альтернативный метод тестирования низкочастотной вибрации огромного роторного экскаватора и получили точные оценки низких собственных частот роторного экскаватора. Гидравлические экскаваторы представляют собой сложную вибрационную систему; поэтому важны экспериментальные исследования для выявления их вибрационных характеристик.В настоящее время экспериментальные исследования вибрационных характеристик гидравлических экскаваторов сосредоточены в основном на вибрационных характеристиках кабины.
Они обнаружили, что вибрацию балки, вызванную вращательным движением при разных скоростях вращения и ускорениях, можно быстро подавить, приложив электрическое поле к балке ЭР, и оценили возможности жидкости ЭР для ослабления вибрации вращающихся балок.Чжэн и др. [10] посвящены моделированию и анализу испытаний на случайную вибрацию с шестью степенями свободы с использованием усовершенствованной системы с несколькими входами и выходами, в которой можно одновременно контролировать три поступательных и три вращательных движения. Цзян и др. [11] представили альтернативный метод тестирования низкочастотной вибрации огромного роторного экскаватора и получили точные оценки низких собственных частот роторного экскаватора. Гидравлические экскаваторы представляют собой сложную вибрационную систему; поэтому важны экспериментальные исследования для выявления их вибрационных характеристик.В настоящее время экспериментальные исследования вибрационных характеристик гидравлических экскаваторов сосредоточены в основном на вибрационных характеристиках кабины. Например, Альфин и др. [12] считали вибрацию всего тела серьезной опасностью для здоровья операторов, поэтому они провели полевые измерения вибрации всего тела гусеничных экскаваторов с гидромолотом, используя стандартную систему измерения вибрации. Результат эксперимента показал, что зарегистрированное значение вибрационной дозы составляет 17,6–62.72 м/с 1,75 , а воздействие вибрации на все тело оператора гидромолота было намного выше и лежит за пределами верхнего предела, указанного в ISO 2631-1. Лу и Чжоу [13] обработали измеренные отклики сиденья гидравлического экскаватора на вибрацию и идентифицировали сигналы вибрации, соответствующие различным источникам возбуждения, с помощью метода частотно-временного анализа в сочетании с ансамблевой декомпозицией эмпирических мод и непрерывным вейвлет-преобразованием. Ван и др. В работе [14] предложены мероприятия по улучшению вибрационных характеристик кабины после вибрационных испытаний гидравлических экскаваторов.Результат показал, что характеристики виброизоляции улучшенной кабины прототипа явно улучшились на частотах ниже 40 Гц и выше 200 Гц.
Например, Альфин и др. [12] считали вибрацию всего тела серьезной опасностью для здоровья операторов, поэтому они провели полевые измерения вибрации всего тела гусеничных экскаваторов с гидромолотом, используя стандартную систему измерения вибрации. Результат эксперимента показал, что зарегистрированное значение вибрационной дозы составляет 17,6–62.72 м/с 1,75 , а воздействие вибрации на все тело оператора гидромолота было намного выше и лежит за пределами верхнего предела, указанного в ISO 2631-1. Лу и Чжоу [13] обработали измеренные отклики сиденья гидравлического экскаватора на вибрацию и идентифицировали сигналы вибрации, соответствующие различным источникам возбуждения, с помощью метода частотно-временного анализа в сочетании с ансамблевой декомпозицией эмпирических мод и непрерывным вейвлет-преобразованием. Ван и др. В работе [14] предложены мероприятия по улучшению вибрационных характеристик кабины после вибрационных испытаний гидравлических экскаваторов.Результат показал, что характеристики виброизоляции улучшенной кабины прототипа явно улучшились на частотах ниже 40 Гц и выше 200 Гц.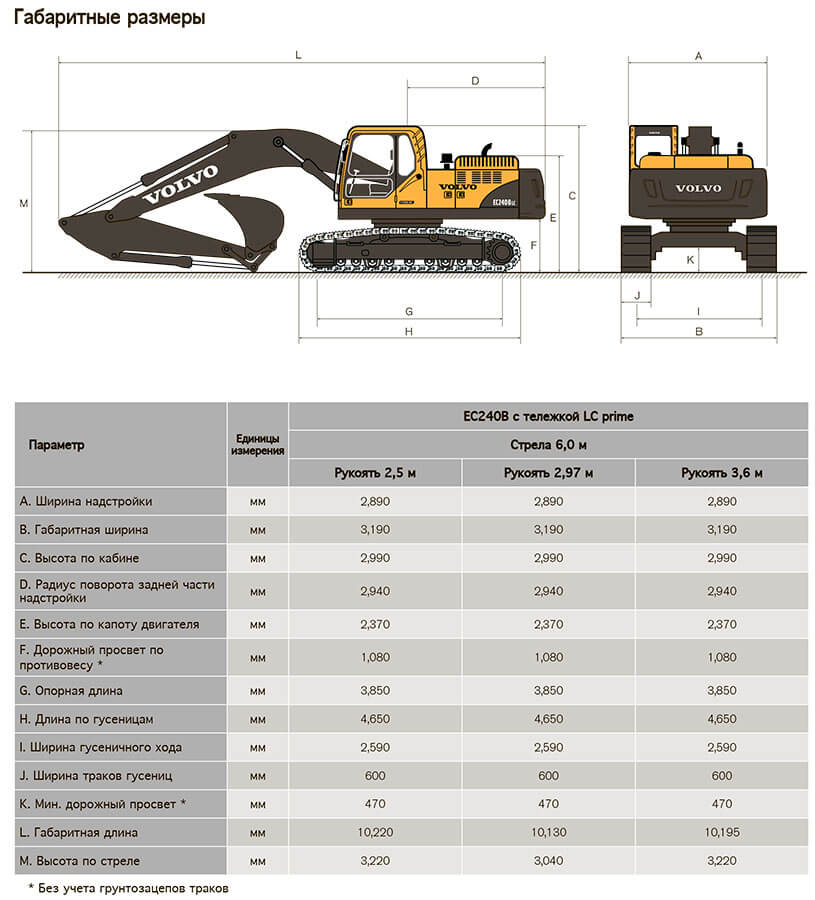 Панг и др. [15] построили модель оперативного анализа пути передачи вибрации от двигателя к сиденью кабины, используя данные вибрационных испытаний экскаватора в рабочих условиях. Результат показал, что характеристики синтезированного выходного сигнала в частотной области хорошо согласуются с характеристиками тестового выходного сигнала; таким образом, модель подтверждается. Домбровский и Дзиурдз [16] предлагают простую оценку путей распространения шума и вибрации машины и проверяют эффективность предложенной процедуры на основе анализа гидравлического экскаватора.Они обнаружили, что эта процедура помогла минимизировать передачу вибраций силовых агрегатов в выбранных диапазонах частот, что привело к изменению общего уровня шума в кабине оператора примерно на 5 дБ. Однако в нескольких экспериментальных исследованиях изучались вибрационные характеристики поворотной платформы в сложных условиях работы.
Панг и др. [15] построили модель оперативного анализа пути передачи вибрации от двигателя к сиденью кабины, используя данные вибрационных испытаний экскаватора в рабочих условиях. Результат показал, что характеристики синтезированного выходного сигнала в частотной области хорошо согласуются с характеристиками тестового выходного сигнала; таким образом, модель подтверждается. Домбровский и Дзиурдз [16] предлагают простую оценку путей распространения шума и вибрации машины и проверяют эффективность предложенной процедуры на основе анализа гидравлического экскаватора.Они обнаружили, что эта процедура помогла минимизировать передачу вибраций силовых агрегатов в выбранных диапазонах частот, что привело к изменению общего уровня шума в кабине оператора примерно на 5 дБ. Однако в нескольких экспериментальных исследованиях изучались вибрационные характеристики поворотной платформы в сложных условиях работы.
В этом исследовании вибрационные характеристики поворотной платформы гидравлического экскаватора тестируются и изучаются в сложных условиях работы. Целью данного исследования является всесторонний анализ влияния различных возбуждений на динамические характеристики поворотной платформы и обеспечение полезной основы для обнаружения взаимосвязей между поворотной платформой и другими соответствующими устройствами гидравлического экскаватора.
Целью данного исследования является всесторонний анализ влияния различных возбуждений на динамические характеристики поворотной платформы и обеспечение полезной основы для обнаружения взаимосвязей между поворотной платформой и другими соответствующими устройствами гидравлического экскаватора.
В качестве объекта исследования в данном исследовании взят гусеничный гидравлический экскаватор CLG906D, как показано на рисунке 1.
2. Анализ вибрационных характеристик поворотной платформы
2.1. Характеристика вибрации
Используя метод конечных элементов, уравнение динамики поворотной платформы гидравлического экскаватора можно составить в виде: где M , K, и C — матрица масс, матрица жесткости, а демпфирующая матрица поворотной платформы гидравлического экскаватора соответственно; , и – вектор обобщенного ускорения, вектор обобщенной скорости и вектор обобщенного перемещения соответственно; F — возбуждение, действующее на гидравлический экскаватор, включающее возбуждение двигателя, возбуждение пульсаций давления поршневого насоса, инерционное возбуждение рабочего органа и дорожное возбуждение [17].
Согласно динамическому уравнению (1), частотное уравнение поворотной платформы гидравлического экскаватора может быть выражено как где — собственная частота поворотной платформы гидравлического экскаватора.
По уравнению (2) можно рассчитать собственные частоты поворотной платформы гидравлического экскаватора, а также определить режимы поворотной платформы гидравлического экскаватора.
Согласно динамическому уравнению (1) методом модальной суперпозиции рассчитывается динамическая реакция поворотной платформы, которая может быть выражена как где – модальный вектор i -го порядка регулярной модальной матрицы; – отклик поворотной платформы на и -ю каноническую координату; а N – число степеней свободы поворотной платформы.
2.2. Анализ основных воздействий
В сложных условиях работы воздействия на гидравлический экскаватор очень сложны. Возбуждения, воздействующие на гидравлический экскаватор, в основном включают следующее: возбуждение двигателя, возбуждение пульсаций давления поршневого насоса, инерционное возбуждение рабочего органа и возбуждение дороги.
2.2.1. Возбуждение двигателя
Возбуждение двигателя гидравлического экскаватора в основном происходит от давления газа во внутреннем цилиндре во время работы двигателя и неуравновешенных сил инерции и моментов инерции, вызванных движущейся массой.Для рядного четырехцилиндрового двигателя Yanmar, который часто используется в гидравлических экскаваторах, неуравновешенная сила инерции второго порядка F 1 может быть выражена как [18] где м b – масса движущихся частей; – радиус кривошипа; λ = / l , l – длина стержня; т время; и f F 1 – частота возбуждения двигателя (Гц) и может быть выражена как где – частота вращения двигателя.
2.2.2. Возбуждение пульсации давления поршневого насоса
Поршневой насос является важной частью гидравлической системы гидравлического экскаватора. При работе поршневого насоса возникает возбуждение пульсаций давления [19].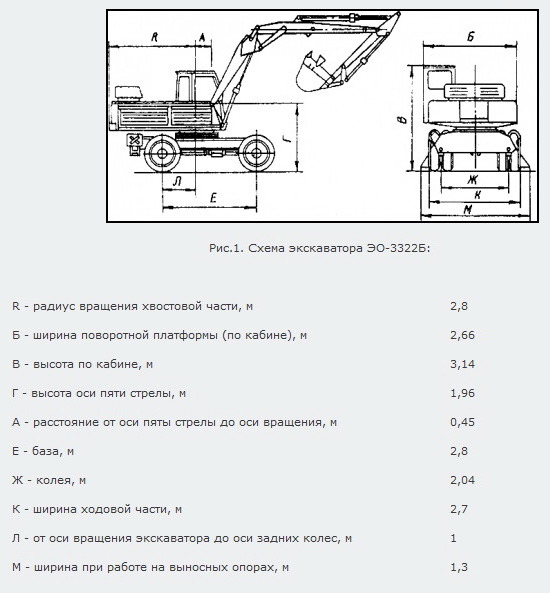 Это один из основных источников вибрации и шума гидравлического экскаватора. По принципу работы поршневого насоса возбуждение пульсаций давления поршневого насоса F 2 можно выразить как [20] где A K – площадь нижней поверхности плунжера. , B 0 – постоянная составляющая пульсаций давления поршневого насоса, B n – амплитуда пульсаций давления поршневого насоса, – фазовый угол пульсаций давления поршневого насоса, B 0 , B n , и связаны с конструктивными параметрами и параметрами материала поршневого насоса, которые можно получить из ссылки [20]; f F 2 – частота возбуждения пульсаций давления поршневого насоса (Гц) и может быть выражена как, где z – количество поршней в поршневом насосе.
Это один из основных источников вибрации и шума гидравлического экскаватора. По принципу работы поршневого насоса возбуждение пульсаций давления поршневого насоса F 2 можно выразить как [20] где A K – площадь нижней поверхности плунжера. , B 0 – постоянная составляющая пульсаций давления поршневого насоса, B n – амплитуда пульсаций давления поршневого насоса, – фазовый угол пульсаций давления поршневого насоса, B 0 , B n , и связаны с конструктивными параметрами и параметрами материала поршневого насоса, которые можно получить из ссылки [20]; f F 2 – частота возбуждения пульсаций давления поршневого насоса (Гц) и может быть выражена как, где z – количество поршней в поршневом насосе.
2.2.3. Инерционное возбуждение рабочего органа
В процессе работы гидравлического экскаватора рабочий орган часто включается и останавливается.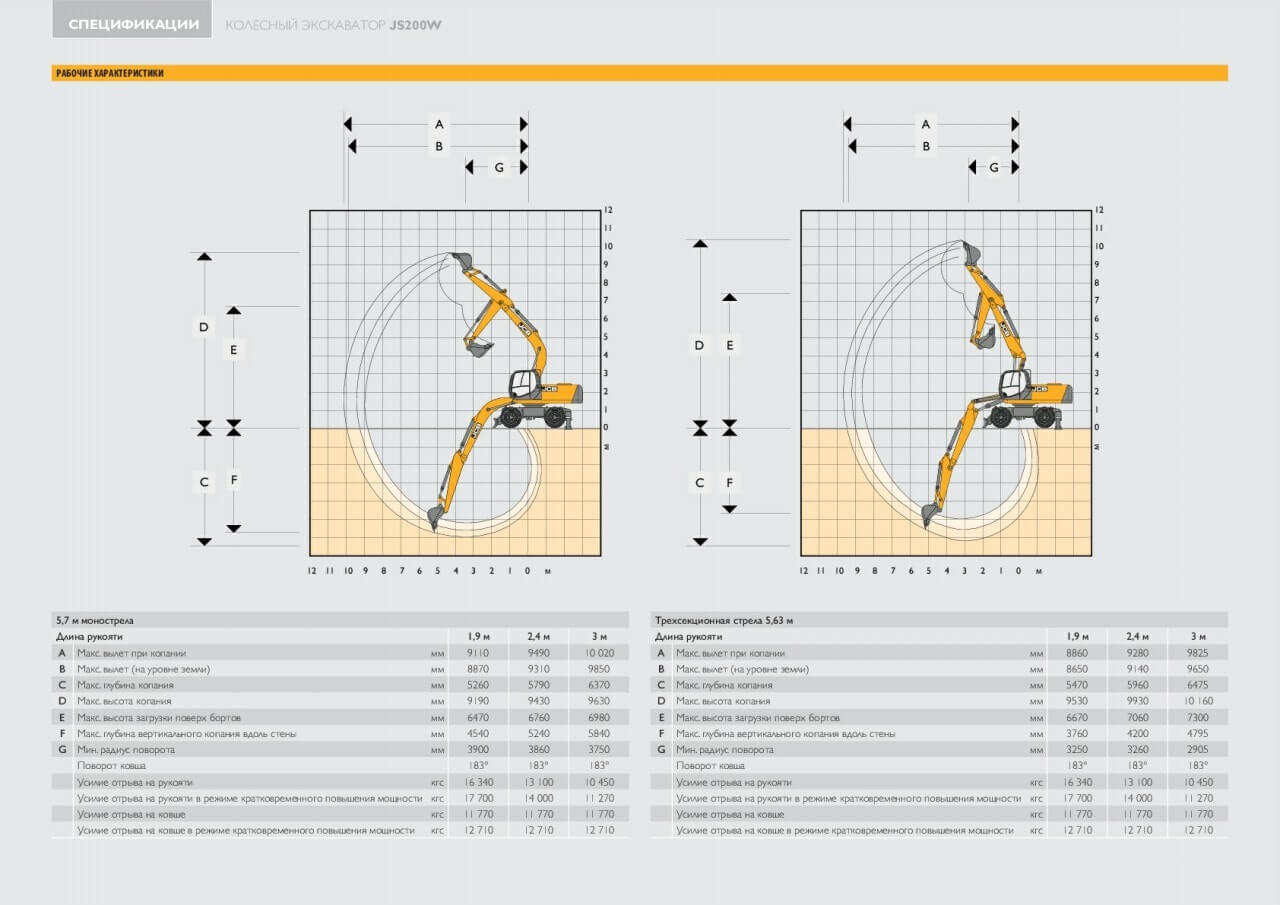 Таким образом, работающее устройство будет генерировать инерционные возбуждения [21]. Поскольку рабочий орган установлен на поворотной платформе гидравлического экскаватора, инерционное возбуждение рабочего органа передается на поворотную платформу через неподвижные устройства. Согласно [22] инерционное возбуждение рабочего органа F 3 может быть выражено как, где m c – масса рабочего органа в процессе возбуждения; – изменение скорости в процессе возбуждения; T c – время возбуждения; – коэффициент восстановления возбуждения; и f F 3 – инерционная частота возбуждения рабочего устройства (Гц) и может быть выражена как
Таким образом, работающее устройство будет генерировать инерционные возбуждения [21]. Поскольку рабочий орган установлен на поворотной платформе гидравлического экскаватора, инерционное возбуждение рабочего органа передается на поворотную платформу через неподвижные устройства. Согласно [22] инерционное возбуждение рабочего органа F 3 может быть выражено как, где m c – масса рабочего органа в процессе возбуждения; – изменение скорости в процессе возбуждения; T c – время возбуждения; – коэффициент восстановления возбуждения; и f F 3 – инерционная частота возбуждения рабочего устройства (Гц) и может быть выражена как
2.2.4. Road Excitation
Экскаватор, рассматриваемый в данном исследовании, представляет собой гусеничный гидравлический экскаватор. При движении гусеничного гидравлического экскаватора по неровной дороге дорожное возбуждение создает большую низкочастотную вибрацию.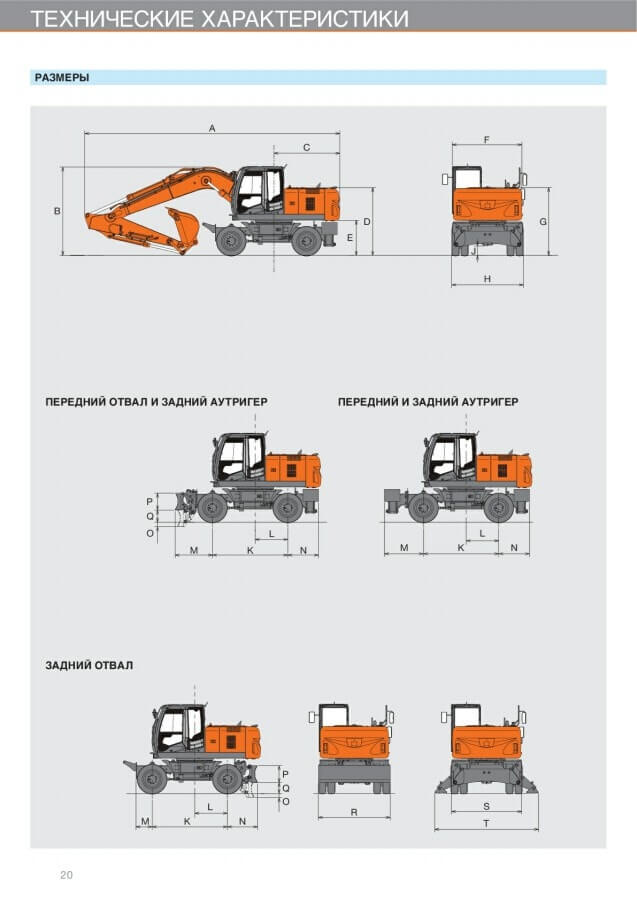 Таким образом, необходимо проанализировать влияние дорожного возбуждения на вибрационные характеристики гусеничного гидравлического экскаватора [23].
Таким образом, необходимо проанализировать влияние дорожного возбуждения на вибрационные характеристики гусеничного гидравлического экскаватора [23].
Пусть Z ( x ) будет функцией неровностей дорожного покрытия для длины дорожного покрытия x .При движении гусеничного гидравлического экскаватора со скоростью , возбуждение от дороги можно выразить как [24] где x = vt и t – время; частоты вертикального дорожного возбуждения в основном распределены в диапазоне 8–10 Гц и целых множителях этого частотного диапазона [24].
2.3. Анализ пути передачи вибрации
Суть передачи вибрации заключается в передаче энергии [25]. Чтобы различать характеристики вибрации при разных типах возбуждения, необходимо проанализировать пути передачи вибрации при разных видах возбуждения.
Двигатель является источником питания гидравлического экскаватора и поршневого насоса. Конец выходного вала двигателя и конец входного вала поршневого насоса соединены жесткой муфтой, поэтому при анализе путей передачи вибрации двигатель и поршневой насос можно рассматривать как единую систему. Система, состоящая из двигателя и поршневого насоса, называется системой двигатель-поршневой насос. Система двигатель-поршневой насос имеет два возбуждения, а именно возбуждение двигателя и возбуждение пульсаций давления поршневого насоса.В соответствии с принципом работы и конструктивными особенностями гидравлического экскаватора двигатель закреплен на поворотной платформе с помощью соединительных болтов. Один конец вала поршневого насоса соединен муфтой с выходным валом двигателя, а другой конец вала поршневого насоса соединен патрубком с гидравлическими шлангами, соединенными с гидравлическими узлами и неподвижными устройствами [26]. ], то есть гидравлические компоненты и стационарные устройства прямо или косвенно связаны с поворотной платформой.Следовательно, возбуждение двигателя и возбуждение пульсаций давления поршневого насоса, создаваемое системой двигатель-поршневой насос, передаются на поворотную платформу двумя путями: (i) возбуждение двигателя и возбуждение пульсаций давления поршневого насоса передаются на поворотная платформа через соединительные болты двигателя; (ii) возбуждения передаются на поворотную платформу через гидравлические компоненты и неподвижные устройства.
Система, состоящая из двигателя и поршневого насоса, называется системой двигатель-поршневой насос. Система двигатель-поршневой насос имеет два возбуждения, а именно возбуждение двигателя и возбуждение пульсаций давления поршневого насоса.В соответствии с принципом работы и конструктивными особенностями гидравлического экскаватора двигатель закреплен на поворотной платформе с помощью соединительных болтов. Один конец вала поршневого насоса соединен муфтой с выходным валом двигателя, а другой конец вала поршневого насоса соединен патрубком с гидравлическими шлангами, соединенными с гидравлическими узлами и неподвижными устройствами [26]. ], то есть гидравлические компоненты и стационарные устройства прямо или косвенно связаны с поворотной платформой.Следовательно, возбуждение двигателя и возбуждение пульсаций давления поршневого насоса, создаваемое системой двигатель-поршневой насос, передаются на поворотную платформу двумя путями: (i) возбуждение двигателя и возбуждение пульсаций давления поршневого насоса передаются на поворотная платформа через соединительные болты двигателя; (ii) возбуждения передаются на поворотную платформу через гидравлические компоненты и неподвижные устройства.
При пуске и остановке рабочего органа инерционное возбуждение рабочего органа может передаваться на поворотную платформу через неподвижные устройства.Это связано с тем, что рабочий орган установлен на поворотной платформе гидравлического экскаватора с помощью стационарных устройств. Аналогично, согласно конструктивным характеристикам гидравлического экскаватора, при движении гусеничного гидравлического экскаватора по неровной дороге дорожное возбуждение передается на поворотную платформу через направляющее колесо, опорное колесо, ведущее колесо и так далее. Таким образом, основные пути передачи вибрации поворотной платформы гидравлического экскаватора показаны на рисунке 2.
2.4. Анализ характеристик передачи вибрации
Используя уравнение (1), можно изучить характеристики вибрации поворотной платформы гидравлического экскаватора. Путем преобразования Фурье динамического уравнения (1) можно получить соответствующую частотную характеристику перемещений [27]. Поворотная платформа гидравлического экскаватора обычно представляет собой стальную конструкцию. Для стальных конструкций амплитуды частотной характеристики уменьшаются по мере увеличения расстояния от источника.Местоположение источника возбуждения записывается как x 0 , а амплитуда частотной характеристики источника возбуждения записывается как U ( x 0 ). Таким образом, амплитуда АЧХ на расстоянии х от источника возбуждения может быть выражена как [28] где – коэффициент затухания.
Поворотная платформа гидравлического экскаватора обычно представляет собой стальную конструкцию. Для стальных конструкций амплитуды частотной характеристики уменьшаются по мере увеличения расстояния от источника.Местоположение источника возбуждения записывается как x 0 , а амплитуда частотной характеристики источника возбуждения записывается как U ( x 0 ). Таким образом, амплитуда АЧХ на расстоянии х от источника возбуждения может быть выражена как [28] где – коэффициент затухания.
Из уравнения (11) следует, что увеличение расстояния между точкой измерения на поворотной платформе и источником возбуждения приведет к уменьшению амплитуды частотной характеристики и увеличению амплитуды затухания вибрации.
2.5. Модальное моделирование
Режимы вибрации поворотной платформы гидравлического экскаватора можно проанализировать с помощью программного обеспечения ANSYS Workbench. Трехмерная модель поворотной платформы показана на рисунке 3. Здесь первые четыре режима поворотной платформы анализируются путем моделирования. Результаты симуляции первых четырех заказа натуральные частоты роторной платформы перечислены в таблице 1.
Здесь первые четыре режима поворотной платформы анализируются путем моделирования. Результаты симуляции первых четырех заказа натуральные частоты роторной платформы перечислены в таблице 1.
| |||||||||||||||||||||
3 Вибрационные испытания поворотной платформы
3.1. Vibration Test System
Электрические методы измерения имеют много преимуществ, таких как широкий диапазон испытательных частот и высокая чувствительность [29].Таким образом, для сбора сигналов вибрации поворотной платформы был принят метод электрических измерений. Место проведения вибрационных испытаний показано на рис. 4. Приборы, использованные в вибрационных испытаниях, включают в себя трехсторонний датчик ускорения ICP, коллектор сигналов LMS Test.LAB и портативный компьютер.
Место проведения вибрационных испытаний показано на рис. 4. Приборы, использованные в вибрационных испытаниях, включают в себя трехсторонний датчик ускорения ICP, коллектор сигналов LMS Test.LAB и портативный компьютер.
3.2. Точки измерения
Вибрационные характеристики точки измерения 1 и точки измерения 2 на поворотной платформе были проанализированы экспериментально. Точка измерения 1 расположена в месте соединения двигателя с поворотной платформой, а точка измерения 2 расположена под левой дверью кабины, как показано на рисунке 5.Очевидно, что точка измерения 2 находится дальше от системы двигатель-поршневой насос (источник возбуждения), чем точка измерения 1.
3.3. Сбор и обработка сигналов вибрации
В этом исследовании сигналы вибрации вращающейся платформы собирались с помощью трехстороннего датчика ускорения ICP. В соответствии с теоремой дискретизации частота дискретизации выбрана равной 2000 Гц, поскольку сигналы вибрации вращающейся платформы обычно концентрируются ниже 1000 Гц.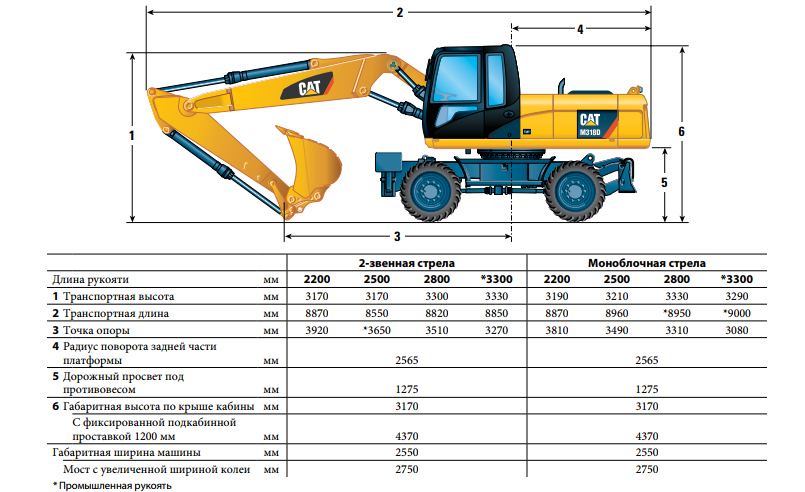
Метод анализа в частотной области часто используется для обработки сигналов вибрации, поскольку сигналы в частотной области более наглядны, чем сигналы во временной области [30]. Поскольку сигналы вибрации, получаемые датчиком ускорения, обычно являются сигналами во временной области, функция преобразования БПФ в системе LMS Test.Lab использовалась для преобразования полученных сигналов во временной области в сигналы в частотной области для анализа характеристик вибрации.
4. Анализ результатов испытаний на вибрацию поворотной платформы
4.1. Испытание на вибрацию в условиях фиксированного ковша
Состояние фиксированного ковша обеспечивает модальное испытание поворотной платформы гидравлического экскаватора. В условиях неподвижного ковша рабочий орган гидравлического экскаватора возвращается и проводится испытание ковша. Поскольку рабочее устройство установлено на поворотной платформе гидравлического экскаватора, на поворотную платформу будет воздействовать инерционное возбуждение рабочего устройства при его втягивании, что означает, что поворотная платформа подвергается ударному воздействию.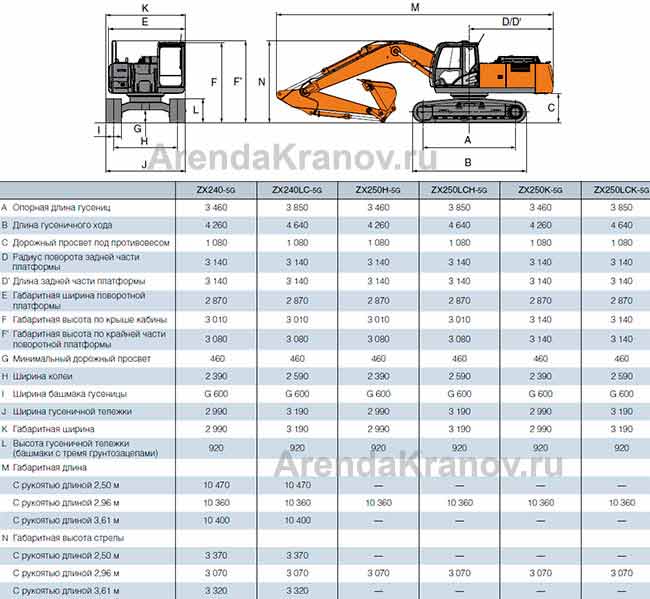 Следовательно, воздействие на поворотную платформу за счет втягивания рабочего органа эквивалентно вибрационному испытанию поворотной платформы со свип-синусоидой. В этом случае вибрационное испытание в условиях неподвижного сборного ковша можно рассматривать как модальное испытание поворотной платформы.
Следовательно, воздействие на поворотную платформу за счет втягивания рабочего органа эквивалентно вибрационному испытанию поворотной платформы со свип-синусоидой. В этом случае вибрационное испытание в условиях неподвижного сборного ковша можно рассматривать как модальное испытание поворотной платформы.
Согласно данным испытаний собственные частоты первого четвертого порядка поворотной платформы получаются, как показано в таблице 2. Путем сравнения результатов испытаний собственных частот первого четвертого порядка поворотной платформы с результатами моделирования первых четырех собственных частот поворотной платформы (см. Таблицу 1), видно, что результаты модального моделирования в основном согласуются с результатами испытаний.Таким образом, можно экспериментально получить модель вращающейся платформы в условиях фиксированного сборного ковша. Это дает новую идею для тестирования модели поворотной платформы гидравлического экскаватора.
| ||||||||||||||||||||||||||||
 31
314.2. Испытание на вибрацию при фиксированных оборотах холостого хода
В соответствии с принципом работы и структурными характеристиками гидравлического экскаватора, когда он находится в условиях фиксированных оборотов холостого хода, двигатель находится в рабочем состоянии, а гидравлическая система не работает.Таким образом, возбуждение, действующее на гидравлический экскаватор, в основном является возбуждением двигателя, а источником возбуждения является система двигатель-поршневой насос.
На рис. 5 точка измерения 1 расположена между двигателем и поворотной платформой, а точка измерения 2 — это точка на поворотной платформе, расположенная под левой дверью кабины. Точка измерения 2 находится дальше от системы двигатель-поршневой насос (источника возбуждения), чем точка измерения 1.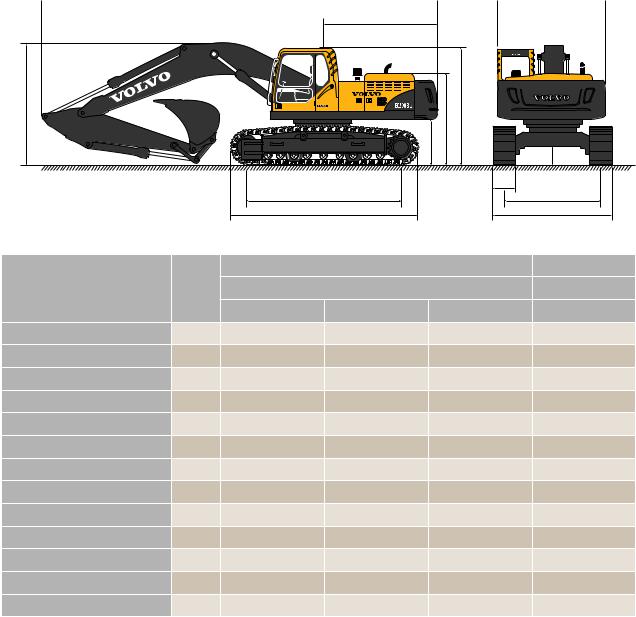 Следовательно, в соответствии с вибрационными характеристиками точек 1 и 2 можно определить вибрационные характеристики вращающейся платформы, возбуждаемой двигателем. могут быть изучены и могут быть проанализированы характеристики передачи вибрации поворотной платформы.
Следовательно, в соответствии с вибрационными характеристиками точек 1 и 2 можно определить вибрационные характеристики вращающейся платформы, возбуждаемой двигателем. могут быть изучены и могут быть проанализированы характеристики передачи вибрации поворотной платформы.
В условиях фиксированной частоты вращения холостого хода частота вращения двигателя составляет n F = 1050 об/мин, а согласно уравнению (5) частота возбуждения двигателя составляет f F 1 8 35 Гц. Сигналы вибрации вдоль направления, перпендикулярного поворотной платформе, были получены при условии фиксированной скорости холостого хода. Экспериментальные кривые динамической характеристики в частотной области для точек измерения 1 и 2 при фиксированных оборотах холостого хода показаны на рисунках 6 и 7 соответственно.Из рисунков 6 и 7 видно, что на частоте возбуждения двигателя (35 Гц) наблюдаются явные пики вибрации. Экспериментальные результаты показывают, что поворотная платформа возбуждается двигателем в условиях фиксированной скорости холостого хода, что согласуется с теоретическим анализом.
Согласно экспериментальным кривым частотной характеристики динамического отклика на рисунках 6 и 7 значения пиков вибрации, соответствующие частоте возбуждения двигателя в точках измерения 1 и 2, приведены в таблице 3.Из таблицы 3 видно, что пиковое значение вибрации в точке измерения 2 составляет 2,12% от значения в точке измерения 1. Основная причина, по которой пиковое значение вибрации в точке измерения 2 меньше, чем в точке измерения 1, заключается в том, что точка измерения 2 находится дальше от системы двигатель-поршень, чем точка измерения 1. Согласно характеристикам передачи вибрации, точки измерения, расположенные дальше от источника возбуждения, будут наблюдать большее ослабление вибрации.
Вышеуказанные результаты показали, что вибрационные сигналы роторной платформы выявили присущую взаимосвязи между вибрационными характеристиками поворота. платформы и возбуждения двигателя в условиях фиксированной скорости холостого хода. Таким образом, динамические характеристики других сопутствующих устройств гидравлического экскаватора можно анализировать на основе вибрационных характеристик поворотной платформы, поскольку поворотная платформа является обязательным промежуточным звеном в пути передачи вибрации гидравлического экскаватора. 4.3. Испытание на вибрацию в фиксированных рабочих условиях В соответствии с принципом работы и структурными характеристиками гидравлического экскаватора, в фиксированных рабочих условиях двигатель и гидравлическая система находятся в рабочем состоянии. На рисунке 5 точки измерения 1 и 2 находятся на поворотной платформе гидравлического экскаватора, а точка измерения 2 находится дальше от источника возбуждения, чем точка измерения 1. Следовательно, исходя из вибрационных характеристик точек измерения 1 и 2 , можно изучить вибрационные характеристики поворотной платформы, одновременно возбуждаемые возбуждением двигателя и пульсацией давления поршневого насоса, и можно проанализировать характеристики передачи вибрации поворотной платформы. При фиксированных рабочих условиях частота вращения двигателя составляет n F = 2250 об/мин; согласно уравнению (5) частота возбуждения двигателя составляет f F 1 = 75 Гц. Вибрационные сигналы в направлении, перпендикулярном поворотной платформе, были получены в результате экспериментов в фиксированных рабочих условиях.Экспериментальные кривые динамической характеристики в частотной области точек измерения 1 и 2 при фиксированных рабочих условиях вращения с постоянной скоростью показаны на рисунках 8 и 9 соответственно. Из рисунков 8 и 9 видно, что на частоте возбуждения пульсаций давления (375 Гц) и частоте возбуждения двигателя (75 Гц) наблюдаются явные пики вибрации. Экспериментальные результаты показывают, что поворотная платформа одновременно возбуждается возбуждением двигателя и возбуждением пульсаций давления при фиксированных рабочих условиях, что согласуется с результатами теоретического анализа. Согласно экспериментальным кривым частотной характеристики динамического отклика на рис.
| |||||||||||||||||||||||||||||||||||||||||||||||
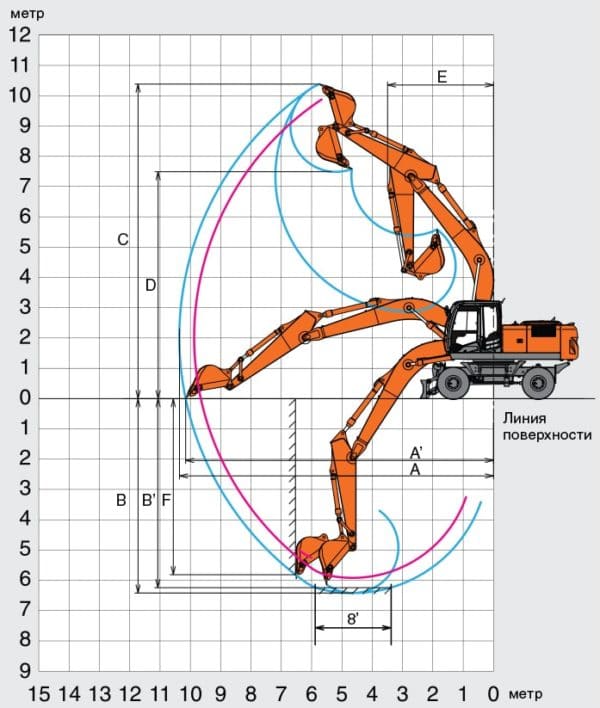 81
81 Следовательно, возбуждения, действующие на гидравлический экскаватор, в основном представляют собой возбуждение двигателя и возбуждение пульсаций давления поршневого насоса при фиксированном рабочем состоянии, то есть все источники возбуждений исходят от системы двигатель-поршневой насос.
Следовательно, возбуждения, действующие на гидравлический экскаватор, в основном представляют собой возбуждение двигателя и возбуждение пульсаций давления поршневого насоса при фиксированном рабочем состоянии, то есть все источники возбуждений исходят от системы двигатель-поршневой насос. Поскольку число поршней в плунжерном насосе z = 10, из уравнения (7) следует, что частота возбуждения пульсаций давления поршневого насоса составляет f F 2 = 375 Гц.
Поскольку число поршней в плунжерном насосе z = 10, из уравнения (7) следует, что частота возбуждения пульсаций давления поршневого насоса составляет f F 2 = 375 Гц. 8 и 9, значения пиков вибрации, соответствующие частоте возбуждения пульсаций давления (375 Гц) и частоте возбуждения двигателя (75 Гц) при измерении точки 1 и 2 приведены в таблице 4. Из таблицы 4 видно, что пиковое значение вибрации, соответствующее частоте возбуждения пульсаций давления (375 Гц), в точке измерения 2 составляет 67,13% от таковой в точке измерения 1, т.е. когда вибрация, возбуждаемая пульсацией давления поршневого насоса, передается от точки измерения 1 к точке измерения 2, амплитуда вибрации претерпевает затухание в 32 раза.87%. Кроме того, пиковое значение вибрации, соответствующее частоте возбуждения двигателя (75 Гц) в точке измерения 2, составляет 22,92 % от значения в точке измерения 1, то есть вибрация, возбуждаемая возбуждением двигателя, затухает на 77,08 % от точки измерения 1. Для измерения точки 2.
8 и 9, значения пиков вибрации, соответствующие частоте возбуждения пульсаций давления (375 Гц) и частоте возбуждения двигателя (75 Гц) при измерении точки 1 и 2 приведены в таблице 4. Из таблицы 4 видно, что пиковое значение вибрации, соответствующее частоте возбуждения пульсаций давления (375 Гц), в точке измерения 2 составляет 67,13% от таковой в точке измерения 1, т.е. когда вибрация, возбуждаемая пульсацией давления поршневого насоса, передается от точки измерения 1 к точке измерения 2, амплитуда вибрации претерпевает затухание в 32 раза.87%. Кроме того, пиковое значение вибрации, соответствующее частоте возбуждения двигателя (75 Гц) в точке измерения 2, составляет 22,92 % от значения в точке измерения 1, то есть вибрация, возбуждаемая возбуждением двигателя, затухает на 77,08 % от точки измерения 1. Для измерения точки 2. 86
86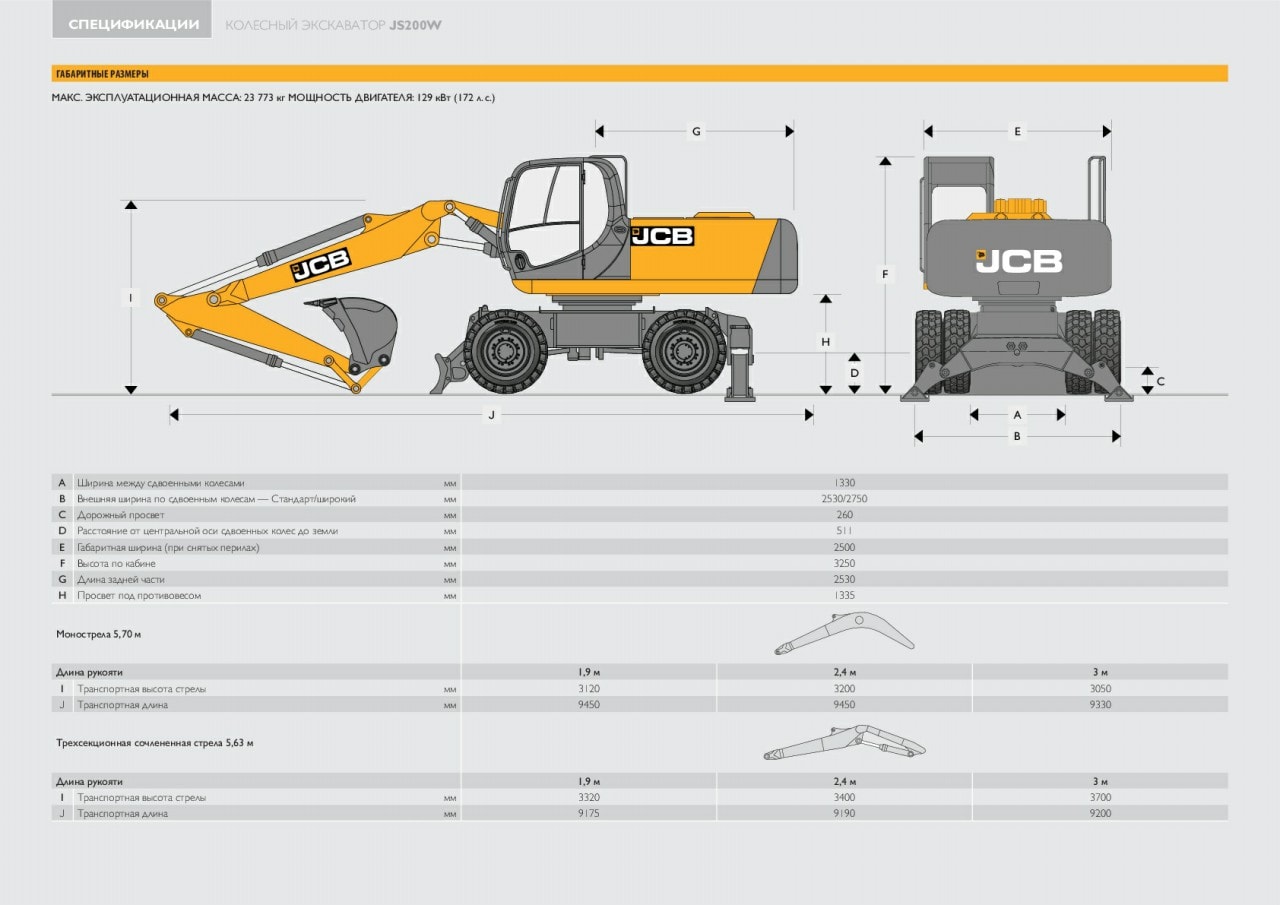 .
.
 77 м/с 2 , и имеется пик вибрации вблизи частоты возбуждения двигателя (75 Гц), где пиковое значение равно 0,68 м/с 2 , то есть на поворотную платформу гидравлического экскаватора воздействует возбуждение пульсаций давления поршневого насоса и возбуждение двигателя. Рисунок 10 также показывает, что в низкочастотном диапазоне вибрационного сигнала присутствуют очень плотные частоты, в основном вызванные дорожным воздействием. Согласно этим результатам становится ясно, что в условиях ходьбы гидравлический экскаватор возбуждается не только возбуждением от дороги, но также возбуждением двигателя и возбуждением пульсаций давления поршневого насоса.Кроме того, приведенные выше результаты также показали, что сигналы вибрации поворотной платформы выявили неотъемлемую связь между вибрационными характеристиками поворотной платформы и возбуждением двигателя, возбуждением пульсаций давления поршневого насоса и возбуждением дороги в условиях ходьбы. Таким образом, по вибрационным характеристикам поворотной платформы также можно анализировать динамические характеристики других связанных устройств.
77 м/с 2 , и имеется пик вибрации вблизи частоты возбуждения двигателя (75 Гц), где пиковое значение равно 0,68 м/с 2 , то есть на поворотную платформу гидравлического экскаватора воздействует возбуждение пульсаций давления поршневого насоса и возбуждение двигателя. Рисунок 10 также показывает, что в низкочастотном диапазоне вибрационного сигнала присутствуют очень плотные частоты, в основном вызванные дорожным воздействием. Согласно этим результатам становится ясно, что в условиях ходьбы гидравлический экскаватор возбуждается не только возбуждением от дороги, но также возбуждением двигателя и возбуждением пульсаций давления поршневого насоса.Кроме того, приведенные выше результаты также показали, что сигналы вибрации поворотной платформы выявили неотъемлемую связь между вибрационными характеристиками поворотной платформы и возбуждением двигателя, возбуждением пульсаций давления поршневого насоса и возбуждением дороги в условиях ходьбы. Таким образом, по вибрационным характеристикам поворотной платформы также можно анализировать динамические характеристики других связанных устройств.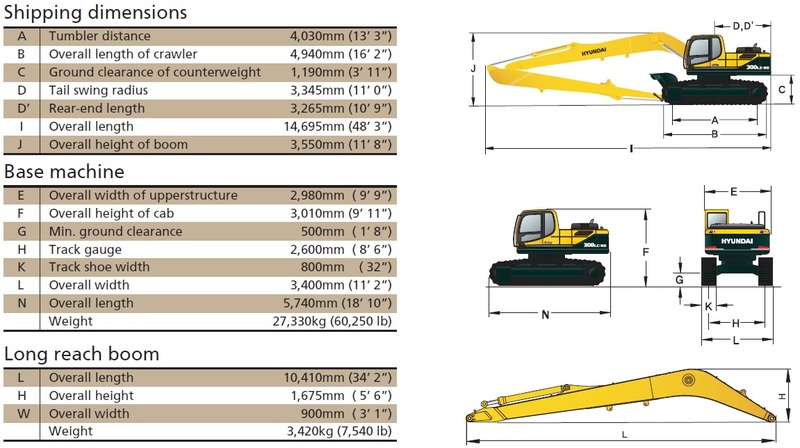
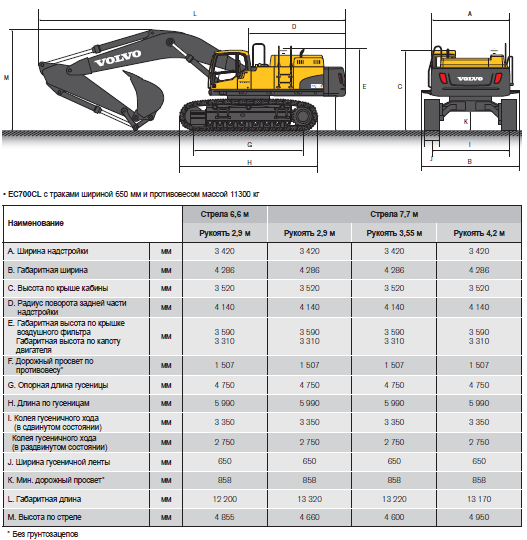 Исследования показывают, что (1) Вибрация поворотной платформы может быть эффективно возбуждена за счет инерционного возбуждения рабочего устройства при его втягивании, что эквивалентно вибрационному испытанию поворотной платформы со скользящей синусоидой. С помощью вибрационного испытания получают первые четыре собственные частоты поворотной платформы, и результаты проверяются соответствующими результатами моделирования.Обнаружено, что испытание на вибрацию в условиях фиксированного сборного ковша может обеспечить новый и эффективный метод испытания режима вращающейся платформы. (2) Сигналы вибрации вращающейся платформы выявили неотъемлемую связь между характеристиками вибрации вращающейся платформы. платформы и основных возбуждений в сложных условиях работы. Кроме того, динамические характеристики других связанных устройств можно изучать путем анализа как характеристик вибрации поворотной платформы, так и связи между вращающейся платформой и другими устройствами гидравлического экскаватора.
Исследования показывают, что (1) Вибрация поворотной платформы может быть эффективно возбуждена за счет инерционного возбуждения рабочего устройства при его втягивании, что эквивалентно вибрационному испытанию поворотной платформы со скользящей синусоидой. С помощью вибрационного испытания получают первые четыре собственные частоты поворотной платформы, и результаты проверяются соответствующими результатами моделирования.Обнаружено, что испытание на вибрацию в условиях фиксированного сборного ковша может обеспечить новый и эффективный метод испытания режима вращающейся платформы. (2) Сигналы вибрации вращающейся платформы выявили неотъемлемую связь между характеристиками вибрации вращающейся платформы. платформы и основных возбуждений в сложных условиях работы. Кроме того, динамические характеристики других связанных устройств можно изучать путем анализа как характеристик вибрации поворотной платформы, так и связи между вращающейся платформой и другими устройствами гидравлического экскаватора. (3) При фиксированных рабочих условиях пиковые значения вибрации в точках измерения 1 и 2, которые возбуждаются возбуждением пульсаций давления поршневого насоса, составляют 6,51 м/с 2 и 4,37 м/с 2 соответственно, и соответствующие пиковые значения вибрации, которые возбуждаются возбуждением двигателя, составляют 2,40 м/с 2 и 0,55 м/с 2 соответственно. Результаты показывают, что влияние возбуждения пульсаций давления поршневого насоса на динамические характеристики поворотной платформы намного больше, чем влияние возбуждения двигателя при фиксированном рабочем режиме.
(3) При фиксированных рабочих условиях пиковые значения вибрации в точках измерения 1 и 2, которые возбуждаются возбуждением пульсаций давления поршневого насоса, составляют 6,51 м/с 2 и 4,37 м/с 2 соответственно, и соответствующие пиковые значения вибрации, которые возбуждаются возбуждением двигателя, составляют 2,40 м/с 2 и 0,55 м/с 2 соответственно. Результаты показывают, что влияние возбуждения пульсаций давления поршневого насоса на динамические характеристики поворотной платформы намного больше, чем влияние возбуждения двигателя при фиксированном рабочем режиме. 51465001.
51465001. С учетом скорости резания, сцепления и размера частиц в качестве переменных было разработано и смоделировано с помощью ЦМР 15 ортогональных рабочих условий. Затем для подбора исходных результатов моделирования используется метод поверхности отклика (RS).Результаты подгонки RS показывают, что: (1) в целом сопротивление резанию уменьшается по мере увеличения размера частиц и скорости резания. Больший размер частиц уменьшит вес загрузки одного ковша за счет уменьшения объемной доли частиц, в то время как более высокая скорость резания приведет к выплескиванию большего количества частиц из ковша; (2) в зависимости от различных условий работы увеличение сцепления может увеличить сопротивление резанию за счет увеличения силы сцепления между частицами или снизить сопротивление резанию за счет «эффекта больших агрегатов», который снижает объемную долю частиц.
С учетом скорости резания, сцепления и размера частиц в качестве переменных было разработано и смоделировано с помощью ЦМР 15 ортогональных рабочих условий. Затем для подбора исходных результатов моделирования используется метод поверхности отклика (RS).Результаты подгонки RS показывают, что: (1) в целом сопротивление резанию уменьшается по мере увеличения размера частиц и скорости резания. Больший размер частиц уменьшит вес загрузки одного ковша за счет уменьшения объемной доли частиц, в то время как более высокая скорость резания приведет к выплескиванию большего количества частиц из ковша; (2) в зависимости от различных условий работы увеличение сцепления может увеличить сопротивление резанию за счет увеличения силы сцепления между частицами или снизить сопротивление резанию за счет «эффекта больших агрегатов», который снижает объемную долю частиц.